一种自动过规检测设备的制作方法
1.本技术涉及自动过规检测技术领域,尤其是涉及一种自动过规检测设备。
背景技术:
2.mim技术结合了粉末冶金和塑料注射成形两种技术的优点,突破了传统金属粉末模压成形工艺在产品形状上的限制。利用金属粉末技术特点能烧结出结构致密、具有良好机械性能及表面质量的机械零件。由于产品的复杂性及工艺制程的要求,在经过注射成型后,产品往往需要摆件、烧结、整形、清洗及后处理等各种工序。
3.现有的,工作人员手持游标卡尺,对零件的尺寸进行测量,根据零件的合格尺寸范围挑选出合格的零件。
4.针对上述中的相关技术,发明人认为上述检测零件的方式由于需要对每个零件进行测量,这种筛选合格零件的方式存在检测效率低的问题。
技术实现要素:
5.为了提高筛选合格零件的效率,本技术提供一种自动过规检测设备。
6.本技术提供的一种自动过规检测设备,采用如下的技术方案:
7.一种自动过规检测设备,包括箱体,所述箱体上固定有支撑架,所述支撑架上设置有通止规,所述支撑架上设置有驱使所述通止规上下滑移的第一驱动气缸,所述第一驱动气缸的活塞杆与所述通止规固定连接,所述箱体上设置有放置腔,所述放置腔位于所述通止规的下方,所述箱体上设置有安装架,所述安装架上设置夹钳,所述箱体上设置有用于驱使所述安装架滑移的第一驱动组件,所述箱体上设置有下料筒,所述箱体上设置有用于驱使所述下料筒滑移的第二驱动组件,所述箱体的侧壁上设置有若干个收料仓,若干个所述收料仓可与所述下料筒相通连接。
8.通过采用上述技术方案,在检测前,工作人员预先将待检测零件放置在箱体上,第一驱动组件驱使安装架移动至零件的上方,随后夹钳夹取零件,第一驱动组件将安装架及夹钳运送至放置腔的上方,夹钳将零件放置在放置腔内,第一驱动气缸与外界气泵连接,气泵向第一驱动气缸供气,第一驱动气缸的活塞杆滑移,驱使通止规向下滑移,当通止规未能穿入零件的孔内时,该检测零件合格;当通止规顺利穿过零件的孔内时,该零件为不合格品,最后检测设备根据检测结果,第二驱动组件驱使下料筒滑移,将完成检测的零件装入不同的收料仓内,全过程均通过机械结构驱动,从而提高了对零件检测的效率。
9.可选的,所述箱体上固定有第一滑轨,所述第一驱动组件包括固定在所述第一滑轨侧壁上的第二驱动气缸,所述第二驱动气缸的活塞杆与所述安装架固定连接。
10.通过采用上述技术方案,第二驱动气缸与外界气泵连接,气泵向第二驱动气缸供气,第二驱动气缸的活塞杆滑移,从而带动安装架滑移。
11.可选的,所述第二驱动组件包括固定在所述箱体上的第一驱动电机、固定在第一驱动电机转轴上的第一转盘、转动连接在所述箱体上的第二转盘,所述第一转盘和第二转
盘上绕卷有第一皮带,所述下料筒与所述第一皮带的侧壁固定连接。
12.通过采用上述技术方案,第一驱动电机与外界电源电连接,启动第二驱动电机,第二驱动电机的转轴转动带动第一转盘转动,第一转盘带动带动第一皮带和第二转盘转动,第一皮带带动下料筒滑移。
13.可选的,所述箱体上固定有第二驱动电机,所述第二驱动电机的转轴上固定有第三转盘,所述箱体上转动连接有第四转盘和第五转盘,所述第三转盘上同轴固定有第六转盘,所述第三转盘和第四转盘上绕卷有第二皮带,所述第五转盘和第六转盘上绕卷有传送带,所述箱体上设置有两个限位板,所述传送带滑移连接在两个所述限位板之间,所述安装架上设置有用于驱使所述夹钳向下滑移的驱动件。
14.通过采用上述技术方案,第二驱动电机与外界电源电连接,启动第二驱动电机,第二驱动电机的转轴转动带动第四转盘转动,在第二皮带的带动下,第三转盘转动,带动第六转盘转动,第六转盘带动传送带移动,从而实现对传送带上零件的传送。
15.可选的,所述驱动件包括固定在所述安装架上的第三驱动气缸,所述第三驱动气缸的活塞杆与所述夹钳固定连接。
16.通过采用上述技术方案,第三驱动气缸与外界气泵连接,气泵向第三驱动气缸供气,第三驱动气缸的活塞杆滑移,带动夹钳向下滑移。
17.可选的,所述安装架上间隔均匀的设置有若干个夹钳。
18.通过采用上述技术方案,安装架滑移,若干个夹钳可以一次性夹取多个零件,减少夹钳重复夹取零件的时间,从而提升检测设备的检测效率。
19.可选的,所述下料筒的侧壁上设置有第四驱动气缸,所述第四驱动气缸的活塞杆上转动连接有盖板,所述盖板位于所述下料筒的出料口处。
20.通过采用上述技术方案,第四驱动气缸与外界气泵连接,气泵向第四驱动气缸供气,第四驱动气缸的活塞杆滑移,盖板盖设在下料筒的出口处,从而防止零件落入不对应的下料仓内。
21.可选的,所述箱体上固定有若干个万向轮,所述箱体的侧壁上螺纹连接有若干个支撑块,所述支撑块抵接在地面上。
22.通过采用上述技术方案,万向轮的设置便于工作人员移动检测设备,将检测设备移动至合适的位置后,转动支撑块,使得支撑块抵接在地面上,支撑块的设置使得检测设备的运行更加平稳。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.夹钳夹取零件,将夹取的零件放置在放置腔内,随后通止规对零件进行检测,检测后合格的产品进入设定的收料仓内,不合格的产品进入另外的收料仓内,全过程自动化检测,从而使得检测效率更高。
25.2.安装架上安装有若干个夹钳,传送带上放置多个零件,在检测过程中,若干个夹钳可以一次性夹取多个零件,从而使得检测设备的检测效率更高。
附图说明
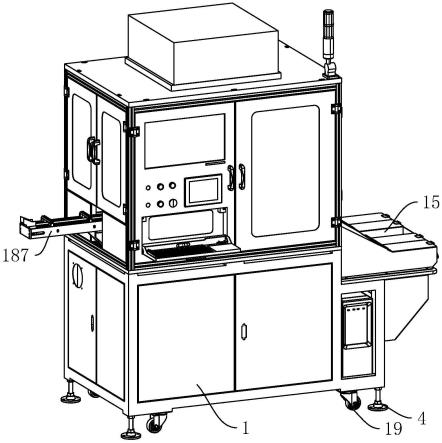
26.图1是本实施例中检测设备的整体结构示意图。
27.图2是本实施例中箱体内部的结构示意图。
28.图3是图2中a处的放大图。
29.图4是本实施例中支撑架部位处的整体结构示意图。
30.图5是本实施例中收料仓部位处的结构示意图。
31.附图标记:1、箱体;11、支撑架;111、通止规;112、第一驱动气缸;12、放置腔;13、安装架;131、夹钳;14、下料筒;2、第二驱动组件;15、收料仓;16、第一滑轨;17、第二驱动气缸;21、第一驱动电机;22、第一转盘;23、第二转盘;231、第一皮带;18、第二驱动电机;181、第三转盘;182、第四转盘;183、第五转盘;184、第六转盘;185、第二皮带;186、传送带;187、限位板;31、第三驱动气缸;141、第四驱动气缸;142、盖板;143、三脚架;19、万向轮;4、支撑块;5、固定架;51、第二滑轨;113、安装座;114、支架;6、固定座。
具体实施方式
32.以下结合附图1-5对本技术作进一步详细说明。
33.本技术实施例公开一种自动过规检测设备。
34.参照图1,一种自动过规检测设备,包括箱体1,箱体1的底壁上安装有若干个万向轮19,本技术中万向轮19设置有四个,万向轮19的设置便于工作人员移动检测设备,箱体1的底壁上螺纹连接有若干个支撑块4,本技术中支撑块4设置有四个,在检测设备检测前,转动支撑块4,使得支撑块4抵接在地面上,支撑块4的设置使得检测设备的检测过程更加平稳。
35.参照图2和图3,箱体1的内壁上通过螺栓固定有固定架5,固定架5上通过螺栓固定有第二驱动电机18,第二驱动电机18的转轴上焊接固定有第三转盘181,固定架5上转动连接有第四转盘182和第五转盘183,第三转盘181侧壁上同轴固定有第六转盘184,第三转盘181和第四转盘182上绕卷有第二皮带185,第五转盘183和第六转盘184上绕卷有传送带186,固定架5的两侧边缘位置通过螺栓固定有两个限位板187,固定架5的一端位于箱体1的外侧,传送带186用于将待加工的零件传送至箱体1的内腔内,限位板187的设置防止传送带186上的零件掉落,第二驱动电机18与外界的电源电连接,启动第二驱动电机18,第二驱动电机18的转轴转动,带动第三转盘181转动,在第二皮带185的作用下第四转盘182转动,第五转盘183和第六转盘184转动,带动传送带186移动,从而将放置在传送带186上的零件运送至箱体1内。
36.参照图2和图4,箱体1的内壁上通过螺栓固定有安装座113,安装座113上通过螺栓固定有第一滑轨16,第一滑轨16上滑移连接有安装架13,安装座113上设置有用于驱使安装架13滑移的第一驱动组件,安装架13上通过螺栓固定有若干个夹钳131,本技术中设置有四个,第一驱动组件驱使安装架13滑移,使得夹钳131位于传送带186的上方,夹钳131夹取零件,将待加工的零件运送至合适的位置。
37.参照图2,第一驱动组件包括通过螺栓固定在第一滑轨16侧壁上的第二驱动气缸17,第二驱动气缸17与外界的气泵连接,气泵向第二驱动气缸17供气,第二驱动气缸17的活塞杆滑移,从而实现安装架13在第一滑轨16上滑移。
38.参照图4,安装架13上设置有用于驱使夹钳131向下移动的驱动件,驱动件包括通过螺栓固定在安装架13上的第三驱动气缸31,第三驱动气缸31的活塞杆与夹钳131侧壁焊接固定,第三驱动气缸31与外界的气泵连接,气泵向第三驱动气缸31供气,第三驱动气缸31
的活塞杆滑移,从而改变夹钳131与待加工零件之间的距离,方便对夹取零件。
39.参照图2和图4,箱体1的内壁上通过螺栓固定有支撑架11,支撑架11侧壁上通过螺栓固定有第一驱动气缸112,第一驱动气缸112的活塞杆上焊接固定有通止规111,第一驱动气缸112与外界气泵连接,气泵向第一驱动气缸112供气,第一驱动气缸112的活塞杆滑移,带动通止规111上下滑移,对待检测零件内径的大小进行测量。
40.参照图2和图4,箱体1的内壁上通过螺栓固定有支架114,支架114的上表面开设有用于放置零件的放置腔12,夹钳131将夹取的零件放置在放置腔12内,第一驱动气缸112驱使通止规111朝向零件的方向移动,当通止规111顺利穿入待检测零件的内腔时,证明该零件内径过大,视为不合格品;当通止规111未能穿入零件的内腔时,视为该零件为合格品。
41.参照图5,箱体1的内壁上通过螺栓固定有固定座6,固定座6上焊接固定有第二滑轨51,第二滑轨51上滑移连接有下料筒14,箱体1内壁上设置有用于驱使下料筒14滑移的第二驱动组件2,第二驱动组件2的包括通过螺栓固定在固定座6上的第一驱动电机21、焊接固定在第一驱动电机21转轴上的第一转盘22、转动连接在箱体1上的第二转盘23,第一转盘22和第二转盘23上绕卷有第一皮带231,下料筒14的侧壁与第一皮带231的侧壁通过铆钉固定,第一驱动电机21与外界电源电连接,启动第一驱动电机21,第一驱动电机21的转轴转动带动第一转盘22转动,第一皮带231运转,从而带动下料筒14在第二滑轨51上滑移。
42.参照图5,箱体1的外壁上焊接固定有若干个收料仓15,本技术中收料仓15设置有五个,每个收料仓15均可与下料仓相通连接,检测设备根据检测结果将零件分类转入不同的收料仓15内,便于工作人员收集完成检测的零件;下料筒14的侧壁上通过螺钉固定有三脚架143,三脚架143的侧壁上通过螺栓固定有第四驱动气缸141,第四驱动气缸141的活塞杆上铰接有盖板142,第四驱动气缸141与外界的气泵连接,启动第四驱动气缸141,第四驱动气缸141的活塞杆滑移,驱使盖板142向下滑移,对下料筒14的出口进行封堵,从而阻止零件进入收料仓15内。
43.本技术实施例一种自动过规检测设备的实施原理为:工作人员预先将待检测的零件放置在传送带186上,启动第二驱动电机18,第二驱动电机18的转轴转动带动第三转盘181和第四转盘182转动,第三转盘181转动带动第五转盘183转动,使得传送带186滑移,传送带186上的零件被运送至箱体1内,随后气泵向第二驱动气缸17供气,第二驱动气缸17的活塞杆滑移,驱使安装架13向靠近传送带186的方向移动,当夹钳131滑移至传送带186的上方后气泵向第三驱动气缸31供气,第三驱动气缸31的活塞杆滑移,带动夹钳131向下滑移,夹取传送带186上的零件,在第二驱动气缸17的作用下,被夹取的零件被运输至放置腔12的上方,夹钳131将零件放置在放置腔12内后,气泵向第一驱动气缸112供气,第一驱动气缸112的活塞杆滑移,通止规111向下滑移,对零件进行检测,检测结束后,启动第一驱动电机21,第一驱动电机21的转轴转动促使下料筒14滑移,检测设备会根据对零件的检测结果将下料筒14移动至对应的收料仓15的位置,完成检测的零件落入收料仓15内。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1