一种用于高精度人影高炮方位角检测的可变多圈电位器
1.本发明涉及人工影响天气高炮火箭地面作业监测及传感与自动控制技术领域,提供了一种用于高精度人影高炮方位角检测的可变多圈电位器。
背景技术:
2.根据人们的意愿,通过人工干预,使某些局地天气现象朝有利于人们预定目的的方向转化,以克服或减轻恶劣天气引发的灾害,这种改造自然的科学技术措施称人工影响天气,简称人影。
3.随着社会发展和科学技术的进步,人工影响天气中的高炮打雨和打冰雹(以下简称人影作业)的科学有效性越来越受到人们的关注,人影作业信息收集及管理是人工影响天气业务工作的一项日常工作,快捷方便的作业信息收集可大大提高工作效率,让管理部门及时获取作业一线的实时信息,为作业指挥和作业效益评估提供基础数据,解决多年来指挥、作业、评估相互脱节的技术难题。
4.现有文献:
5.1.一种风力发电机叶轮方位角的测量装置及其测量方法cn112855468a,文中的装置和方法测量角度还需要一个位移传感器;一种多圈精密电位器cn204360863u,宽幅电位器cn103489554a,二文献方法和装置结构复杂,需要三维空间,即需要三维坐标才能定量计算,文中只有定性的介绍,没有定量算法,特别是在使用中,电位器转轴随着转动会上下移动,对被测物体连接要求较高,空间增加,也增加体积,应用范围受限(针对高炮方位角检测明显不适用)。360度旋转的电位器cn204189544u,需要两个电位器,也未给出具体算法。
6.2.cn102589351a采用双联多圈电位器检测高炮方位角:一种基于人影高炮作业参数的数字化采集装置及其检测方法研制的装置可以实时检测37高炮作业起止时间、炮弹发射数量及方位和仰角,实现人影作业数据自动收集,该传感器安装安装在高炮方向机底盖上的底座,底座上设置有底座孔,该底座孔内安装有力传递装置,对于人影37高炮,高炮方位旋转1圈,方向机转轮需转动12圈,盖孔内的连接轴同样转动12圈,即高炮炮管转动一圈,电位器要旋转12圈,电位器输出不一一对应,采集器断电后方向机若旋转超过一圈再开机(炮管旋转超过30
°
),就无法确定高炮炮口方位角,在实际应用中,要求开机前必须将高炮方位调整到指定位置,给使用带来不便。
7.现有技术n203772138u一种高炮方位角位移检测器:通过机械减速箱对双联电位器的转动速度进行调整,对于人影37高炮,高炮方位旋转1圈,方向机转轮需转动12圈,盖孔内的连接轴同样转动12圈,将机械减速箱的转动比设置为12,使高炮方位的旋转角度与电位器的旋转角度完全同步。更简单的说,高炮方位旋转一圈,电位器也刚好旋转一圈。高炮方位角位移检测器断电后,经任意旋转,再开机后,电位器同样保持了断电前相同的阻值,不会因为断电而影响测量的精度。该装置中的方位传感器结构复杂,体积大,成本高,安装不方便,存在机械回差,数据检测精度不够高,需要两个信号调理电路,电路变得复杂。这两种方案组合研制的装置,存在以下问题:
8.一、需要两个电位器和两路信号调理电路;
9.二、机械齿轮传动存在回差问题。(回差的含义是,传动装置在单向传动过程中,当输入轴开始反向后,到输出轴跟随反向时,因为存在机械间隙,传感器会发生小幅度的转动但是高炮是不会转动的。输出轴在转角上采用可变多圈电位器可以直接检测方向机旋转角度,避开了12圈的变速使回差减少到1/12,采用智能判断方向机转动方向,根据转动方向判断是否回转,若回转则扣除实测回差误差。)
10.文献中的方法:工艺复杂,加工制造困难,体积大质量重,成本高,抗震性差,无角度计算算法,检测精度低。
技术实现要素:
11.本发明的目的在于提供一种用于高精度人影高炮方位角检测的可变多圈电位器,解决关机方位角记忆问题、机械回差问题。
12.为实现上述目的,本发明提供的技术解决方案是:
13.一种用于高精度人影高炮方位角检测的可变多圈电位器,包括底座,在底座上设置有碳膜电阻槽,在底座的中心设置有转轴,转轴上设置有与转轴相互垂直的电极安装部,l形电极穿过电极安装部与电极安装部间隙配合,l形电极的触头部上的触头插入碳膜电阻槽与碳膜电阻槽电连接,碳膜电阻槽和l形电极均通过电极引出;
14.碳膜电阻槽为渐变螺旋曲线,螺旋渐变曲线半径随旋转角度线性增加,螺旋渐变曲线角度范围为0
°
到θ,螺旋渐变曲线的半径r线性增加,α为电位器旋转的角度,其取值范围0到θ,单位为度,θ>360
°
,r为电位器旋转到α时圆半径,r0为电位器在0
°
时圆半径,电位器设计好后,r0和k均为常数。
15.上述技术方案中,转轴上设置有电极环,在底座上设置有与电极环配合的碳刷电极座,所述的碳刷电极座的碳刷与电极环配合。
16.上述技术方案中,触头采用弧形结构。
17.上述技术方案中,电极安装部上设置有与转轴的轴线相垂直的通孔,l形电极的滑动部穿过通孔与通孔间隙配合。
18.上述技术方案中,滑动部穿过电极安装部的部分上套设有弹簧,弹簧一端通过电极安装部限位,弹簧另一端通过的滑动部末端设置有弹簧挡片限位。
19.上述技术方案中,电位器旋转到α时,设为i0为电流,v
α
电位器旋转到α角度的电压。
20.本发明还提供了一种高精度人影高炮方位角检测方法,其特征在于包括:
21.步骤1、对可变多圈电位器在量程θ内以角度δα进行分段标定,给出每段对应的电压值,得到大角度电位器角度分段与对应的输出电压一一对应构成一个“角度电压插值表”;
22.步骤2、将插值表中每个数据排在数轴上,每个数据有一个坐标值坐标,并依次增大,并初始化比较数轴数据为整个数轴上数据,获取当前可变多圈电位器在α角度时的电压
值u
α
;
23.步骤3、取比较数轴数据的中点对应的电压值u
mid
,比较电压值u
α
与电压值u
mid
的大小,如电压值u
α
大于电压值u
mid
则取数轴上从u
mid
开始的后半段为新的比较数轴数据,进行步骤4,如电压值u
α
小于电压值u
mid
则取数轴上从u
mid
开始的前半段为新的比较数轴数据,进行步骤4,如电压值u
α
等于电压值u
mid
则当前角度α的值为电压值u
mid
在电压插值表中对应的角度值,如果最中间值有两个,选较大那个作为中间值;
24.步骤4、判断检测的电压值u
α
是否落在相邻两个坐标值之间,如是则按如下公式计算:
25.u
α
为电位器在α角度时的电压,u
n-1
和un分别是插值表中最靠近u
α
的前后两个值,u
n-1
≤u
α
<un或u
n-1
<u
α
≤un,α
n-1
是插值表中电压值u
n-1
对应的角度值,δα为分段对应的角度即步进角度为常数;
26.否则,进行步骤3。
27.上述技术方案中,将单位时间内检测到的输出电压值经质量控制后,按照时间构成一个数据组,若该数据依次增加或减少,则方向机在按照一个反向旋转,则无回差,若出现连续几个数据反向变化,可判断方向机出现反方向旋转,则做回差数据处理。
28.上述技术方案中,单位时间取1到5秒。
29.上述技术方案中,回差数据处理是指将检将计算出的电压减去回差值。
30.因为本发明采用上述技术方案,因此具备以下有益效果:
31.1、将装置安装在人影高炮上,能完成37双管炮作业的方位和俯仰角自动检测;实现炮弹发射时间和数量的自动检测,相关数据存储;基于tcp/ip的gprs数据传输,其系统前端安装在人影高炮作业现场。
32.2、能将相关数据实时传输到人影管理部门,让管理部门及时获取作业一线的实时信息,为作业指挥和作业效益评估提供基础数据。
33.3、本实用新型提供的结构配合采用“可变多圈电位器方位角测量法”使其完成对方位角任意角度的测量,利用方位机旋转的传动比,提高了方位角检测精度,采用该法,减少了12倍减速传动装置,方位传感器结构变简单,体积变小,成本大幅降低。
34.4、本实用新型提供的结构,配合采用“二分插值法”,快速高效计算方位角,提出“智能回差修正法”解决机械回差引起的误差,进一步提高方位角检测精度。采用滑动平均等数据处理方法解决俯仰角、方位角受炮弹爆炸瞬间造成的电磁干扰、震动干扰。
35.5、该装置具有快捷方便的作业信息收集能力,大大提高工作效率,同时节省大量的人力、物力。
36.本发明装置的主要测试指标见表一:
37.表一 主要技术指标
38.主要指标数值范围方位角精度《0.3
°
俯仰角精度《0.3
°
起止时间《1s炮弹数量检测100%
方位角、俯仰角、用弹量检测方式自动检测击发方式自动击发通信频率900/1800mhz指令下达和数据收集时时间《2s
附图说明
39.图1是本发明所述系统总体结构图。
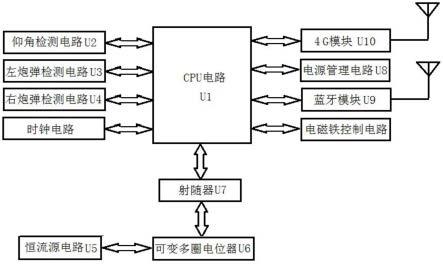
40.图2是本发明所述硬件电路总体框图示意图。
41.图3是电路部分安装示意图,图中a为电路部位安装位示意图。
42.图4是本发明实施例所述基于可变多圈电位器的安装部分示意图。
43.图5是本发明又一实施例,所述接近开关idb40na的安装示意图。
44.图6为可变多圈电位器示意图;
45.图7、图8为可变多圈电位器的不同实施例,其中顶盖做了剖视;
46.图9为l形电极;
47.图10为局部放大图。
48.附图标记说明
49.1-底座,2-顶盖,3-转轴,3-1-电极安装部,3-2-电极环,4-l形电极,4-1-触头,4-2-触头部,4-3-滑动部,4-4-弹簧挡片,5-碳刷电极座,6-碳膜电阻槽7-弹簧。
具体实施方式
50.以下将对本发明的实施例给出详细的说明。尽管本发明将结合一些具体实施方式进行阐述和说明,但需要注意的是本发明并不仅仅只局限于这些实施方式。相反,对本发明进行的修改或者等同替换,均应涵盖在本发明的权利要求范围当中。
51.另外,为了更好的说明本发明,在下文的具体实施方式中给出了众多的具体细节。本领域技术人员将理解,没有这些具体细节,本发明同样可以实施。
52.为了方便本领域技术人员更好的理解本发明方案及应用场景,先对与本发明相关的技术进行详细说明:
53.参见图1、图2、图3可知,基于人影高炮作业参数的数字化采集装置,包括cpu电路u1、横流电源电路u5、可变多圈电位器u6、射随器u7、俯角检测电路u2、左炮弹检测电路u3、右炮弹检测电路u4,4g模块u10、蓝牙模块u9、电源管理电路u8、电磁铁控制电路,时钟电路。所述cpu电路u1通过数据总线/地址总线/控制总线与上述各电路连接。采集装置的cpu电路u1采用lpc2388芯片,控制整个系统的信息获取和信号处理、通信等处理的操作。
54.方位检测电路方位检测电路由一个“可变多圈电位器”、恒流源和射级跟随器组成,电信号经微处理器自带a/d转换后得到相应数字信号,具体由cpu电路u1,tlc2652高精度运算放大器和电压基准源tl431组成,设计的“可变多圈电位器”碳膜电阻曲面(线)渐变,其曲线半径随旋转角度线性增加,其曲面结构保证0
°
到θ,θ—电位器设计的电器角度(θ>360
°
,针对高炮电器角度和电器角度设计为0
°
到4320
°
);曲面碳膜下凹成滑槽,接触弹片借滑槽弹力(压力)可自动伸缩,始终保持在滑槽内;电位器与传统点位器结构类似,接触弹片在一个平面上旋转(其位置二位坐标确定),曲线长度从0
°
开始随电位器旋转而增加,曲面
半径线性增加,α—电位器旋转的角度,0到θ,θ>360
°
,单位为度,r—电位器旋转到α时圆半径,r0—电位器在0
°
时圆半径,r0、k均为常数,根据设计需要确定。
55.数量检测电路由左炮弹检测电路u3和右炮弹检测电路u4,完成高炮作业用弹量的自动检测,电路主要由接近开关idb40na与4n25光耦合器、cpu电路u1构成;图5中,接近开关idb40na j1,炮弹弹壳经过时,输出电平发生改变,4n25光耦主要作用是抗干扰和完成电平匹配,接近传感器工作电压为12伏,中央处理器工作电压3.3伏,cpu电路u1,完成对接近开关的高低低电平的实时检测,以获得炮弹数量的实时检测。所述中央微处理器u1通过数据总线/地址总线/控制总线与上述各电路连接。
56.此外,俯角检测电路u2主要完成高炮作业的俯仰角自动检测,电路主要由倾角传感器dcm250和相应接口电路构成。4g模块u10电路主要完成高炮作业结束后将作业的方位角、俯仰角、用弹量、作业起止时间等数据通过tcp/ip方式实时传输到人影管理部门,电路由gtm900和相应的接口电路组成。蓝牙模块u9主要完成指挥终端与采集装置的数据交互。
57.电源管理电路u8主要完成电源管理,电路开关机控制,具体由霍尔开关h248、开关集成芯片twh8778,和为中央处理单元u1组成。
58.时钟电路得到电路运行的时钟,提供高炮作业起止时间,电路由ds1302和相应的电路组成。电源控制电路完成电池的容量检测、充电自动控制、电池低电量和环境高低温的自动保护等功能。电磁铁控制电路主要控制电磁铁工作,选用直流管式电磁铁,与高炮击发拨叉连接,额定吸力大于30kg,衔铁行程大于10mm,保证足够的推杆行程和击发力,用以实现高炮电击发。
59.图3显示了数字化采集装置在人影高炮上的安装位置。另外,俯仰传感器就设计到设备中,不需要单独安装。图4显示了所述可变多圈电位器安装在人影高炮方位角控制器的旋转处u11。接近开关idb40nau13是安装在高炮的退弹口处j1,每退出一个弹壳经过接近开关idb40na时,接近开关idb40na就输出一个高低电平变化,从而检测出炮弹数量。
60.本发明还提供基于人影高炮作业参数的数字化采集装置的检测方法,尤其是基于人影高炮的可变多圈电位器方位角测量方法,包括如下步骤:
61.算法设计原理:1.碳膜电阻曲面(线)渐变,其曲线半径随旋转角度线性增加,其曲面结构保证0
°
到θ,θ—电位器设计的电器角度(θ>360
°
,一般设计为360
°
的n倍)角度范围内空间错开(如上图),电器角度和机械角度均大于360
°
;
62.2.曲面碳膜下凹成滑槽,接触弹片借滑槽弹力(压力)可自动伸缩,始终保持在滑槽内;
63.3.电位器与传统点位器结构类似,接触弹片在一个平面上旋转(其位置二位坐标确定);
64.4.曲面半径线性增加,α—电位器旋转的角度,其取值范围0到θ,θ>360
°
,单位为度,r—电位器旋转到α时圆半径,r0—电位器在0
°
时圆半径,r0和k均为常数,根据设计需要确定,k一般可取(0.05~0.2)r0;
65.5.曲线长度从0
°
开始随电位器旋转而增加,
[0066][0067]
l—曲线长度
[0068]
6.电阻大小与曲线(圆弧)长度成线性关系
[0069][0070]
m—为常数,与碳膜电阻材料和面积有关。
[0071]
7.电路实现:给电位器加一个恒流源,电流为i0,中心抽头经过一个射随器接到cpu(带ad)端口,经ad转换得到电压数字,中心抽头端的电压与电阻成线性关系,根据下面的算法可计算出相应的角度。
[0072]vα
—电位器旋转到α角度的电压
[0073]
设为正常数,为正常数,则有k2α2+k1α-v
α
=0,求解得或(为负应舍去)
[0074]
8.采用“二分插值法”,快速高精度计算角度
[0075]
实际电位器碳膜电阻是二次函数关系,再加上受加工工艺影响,其线性度不一定理想,我们提出采用采用“二分插值法”,可快速高精度计算出角度。研制的“可变多圈电位器”分段标定(比如每变化1
°
角度为一段)给出每段对应的电压值,即电位器角度分段与对应的输出电压一一对应构成一个“角度电压插值表”,该表可实测得到。每段(比如390
°
到391
°
段)可以按照线性变化来处理,用户使用插值表可快速高精度算出角度,查表采用二分法可提高计算效率,快速得到相应角度,基本方法是:将插值表中每个数据排在数轴上,每个数据有一个坐标值坐标,并依次增大,每次将检测电压与最中间值比较(若最中间值有两个,选较大那个作为中间值),若大于最大中间值,继续与后半段中的最中间值比较(若后半段最中间值有两个,选较大那个作为中间值),反之与前半段最中间值比较(若前半段最中间值有两个,选较大那个作为中间值),如此循环,直到检测电压值落在相邻两个坐标值之间(如电压值u
α
等于最中间电压值,当前角度α的值为最中间电压值在插值表中对应的角度值),最后按如下公式计算:
[0076][0077]uα
—电位器在α角度时的电压,电位器中心抽头接到cpu(带ad)端口经ad转换得到电压数字。
[0078]uα
为电位器在α角度时的电压,u
n-1
和un分别是插值表中最靠近u
α
的前后两个值,u
n-1
≤u
α
<un或u
n-1
<u
α
≤un,α
n-1
是插值表中电压值u
n-1
对应的角度值,δα为分段对应的角度即步进角度为常数,如每变化1
°
角度为一段,则δα=1
°
)。
[0079]
针对高炮设计的“可变多圈电位器”的机械角度和电器角度均为360
°
的12倍即4320
°
,高炮机械角度为360
°
,因此,前面计算出的α为方向机机械角度,高炮炮口机械角度
则为:
[0080]
8.采用“智能回差修正法”,减小实测误差
[0081]
将单位时间内(单位时间可取1到5秒)检测到的输出电压值经质量控制后,按照时间构成一个数据组,若该数据依次增加或减少,则方向机在按照一个反向旋转,则无回差,若出现连续几个数据反向变化,可判断方向机出现反方向旋转,则做回差数据处理。
[0082]
回差数据处理方法:定义方向机按顺时针方向旋转,测出的实测数据作为标准,并写进前面所述的插值表中,在使用过程中,方向机一直顺时针方向旋转,则检测值无回差误差,若判断方向机反转即逆时针旋转,则将检将计算出的电压减去回差值,不同高炮不同电位器结构回差误差不一样,该值可实测得到。
[0083]
计算出后θ,就得到相对方位角,设备安装到高炮上通过零刻度校正后就可以得到高炮实际方位角。
[0084]
本发明装置安装后的使用过程:
[0085]
装置及传感器安装在高炮上,打开电源开关,检查各指示灯,指示灯正常后,装置就已经进入实时自动检测高炮的方位角和俯仰角,此时即可进行高炮作业,当高炮完成第一炮作业的同一时刻,就自动记录作业的开始时间和此发炮弹的方位角、俯仰角,同时启动定时器,如果20秒(此时间可根据需要来设置)内没有作业就将最后一次作业时间记录下来,并通过短信或tct/ip的方式将此次作业的起止时间、每发炮弹的方位角俯仰角数据发射到管理中心。整个过程,除处理开关电源外,其余过程全是自动完成的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1