激光振镜及激光雷达系统的制作方法
1.本技术涉及光学机械技术领域,尤其涉及一种激光振镜及激光雷达系统。
背景技术:
2.激光雷达是以发射光光束来探测目标物体的距离、位置及速度等特征量的雷达系统。在激光雷达系统中,为更好的探测目标物体,需扩大激光扫描面积,则需增加激光发射光线。为增加激光光线,则需设置多个激光发射设备,花费成本较高。
3.激光振镜是用在激光行业的一种扫描振镜,在应用时,通过x、y反射镜片的摆动,实现激光在工作平面内的高速精确定位。将激光振镜应用于激光雷达中,以更好的探测目标物体,将具有广阔的应用场景。
技术实现要素:
4.本技术提供了一种激光振镜及激光雷达系统,旨在增加激光光束经激光振镜反射出的光束,增大激光光束扫描面积。
5.本技术提供了一种激光振镜,所述激光振镜包括:
6.第一基座;
7.第一支撑件,所述第一支撑件安装于所述第一基座,且所述第一支撑件的至少部分能够相对所述第一基座运动;
8.第二基座,所述第二基座与所述第一支撑件连接,使得所述第二基座能够转动;
9.第一驱动件,所述第一驱动件用于带动所述第二基座绕自身轴线转动;
10.第二支撑件,所述第二支撑件安装于所述第二基座,并能够相对所述第二基座转动;
11.第二驱动件,所述第二驱动件用于带动所述第二支撑件绕自身轴线转动;
12.工作镜体,所述工作镜体设于所述第二支撑件。
13.本技术中,以工作镜体中心为原点设置坐标轴(包括x轴,y轴),使第二基座绕自身轴线转动中的轴线与y轴重合,使第二支撑件绕自身轴线转动中的轴线与x轴重合。即,第一驱动件通电后产生磁场,在磁场作用下,第一驱动件能够带动第二基座绕y轴转动,第二支撑件安装于第二基座,工作镜体安装于第二支撑件,进而使第一驱动件通过第二基座带动工作镜体绕y轴转动。第二驱动件通电后产生磁场,在磁场作用下,第二驱动件能够给第二支撑件特定的激励,使第二支撑件绕x轴转动,工作镜体安装于第二支撑件,进而使第二支撑件带动工作镜体绕x轴转动。采用该激光振镜,使照射在工作镜体的单束光线路径,经工作镜体转动反射出多束光线路径,增加经工作镜体反射出的光线,进而增大光束扫描面积。并通过控制第一驱动件调节工作镜体绕y轴转动角度及转动频率,控制第二驱动件调节工作镜体绕x轴转动角度及转动频率,使经工作镜体反射出的光束按照既定的扫描顺序扫描待测目标。
14.在一种可能的设计中,所述第一支撑件为柔性支撑件,所述第一支撑件设有固定
端和转动端,所述转动端能够相对所述固定端转动,所述固定端与所述第一基座连接,所述转动端与所述第二基座连接。
15.本技术中,第一支撑件为柔性支撑件,利用柔性支撑件作为第二基座转动的结构支撑,可实现第二基座高频率转动。
16.第一支撑件可以为十字柔性轴承,十字柔性轴承是由弹片组成的一种结构简单、形状较为规则的柔性支撑结构,其回转中心与几何中心轴重合,利用均布在圆周径向弹性薄片的弹性变形进行工作,即可以绕自身回转中心实现有限角度范围内的转动。该十字柔性轴承具有无摩擦,无间隙,体积小,精度高,承载能力大等特点。利用十字柔性轴承作为支撑结构,在保证使用寿命的同时提高了工作镜体的转角范围和转动频率。
17.此外,在激光振镜断电的情况下,在十字柔性轴承的弹性作用下可带动工作镜体回到中间位置,保证激光振镜在断电状态的稳定性。
18.在一种可能的设计中,所述第二支撑件为柔性支撑件。
19.本技术中,该柔性支撑件具有弹性,利用柔性支撑件作为第二支撑件能够转动的结构支撑,以实现第二支撑件的高频率转动,并提高工作镜体的转角范围。
20.第二支撑件可以为柔性振片,第二驱动件给柔性振片特定激励后,使柔性振片处于持续振动状态,即柔性振片利用本身的机械谐振特性带动工作镜体绕x轴转动。
21.此外,在激光振镜断电的情况下,在柔性振片的弹性作用下可带动工作镜体回到中间位置,保证激光振镜在断电状态的稳定性。
22.在一种可能的设计中,所述第二基座转动频率为5~10hz;
23.所述第二支撑件转动频率为200~400hz。
24.本技术中,通过第一支撑件作为第二基座转动的支撑结构,使第二基座转动频率可达到5~10hz,以使工作镜体绕y轴转动频率为5~10hz,实现了高频率转动,如第二基座转动频率可以为6hz、8hz、10hz,具体频率可通过控制第一驱动件进行调整。
25.通过第二支撑件作为工作镜体支撑结构,使第二支撑件转动频率可达到200~400hz,进而使工作镜体绕x轴转动频率可达200~400hz,实现了高频率转动,如第二支撑件动频率可以为200hz、250hz、300hz、400hz,具体频率可通过控制第二驱动件给第二支撑件的初始激励进行调整。
26.在一种可能的设计中,所述第二基座转动角度为4
°
~7
°
;
27.所述第二支撑件转动角度为8
°
~12
°
。
28.本技术中,通过第一支撑件作为第二基座转动的支撑机构,使第二基座转动角度可达到4
°
~7
°
,进而增大了工作镜体绕y轴的转动角度。第二基座带动工作镜体绕y轴转动的角度范围为4
°
~7
°
,使工作镜体能够绕y轴转动角度的范围在-7
°
~7
°
之间。
29.通过第二支撑件作为工作镜体支撑结构,使第二支撑件转动角度可达到8
°
~12
°
,进而使工作镜体绕x轴转动角度可达8
°
~12
°
,进而增大了工作镜体绕x轴的转动角度。
30.在一种可能的设计中,所述第一驱动件与所述第二驱动件均为音圈电机。
31.本技术中,第一驱动件与第二驱动件均为动磁式音圈电机
32.在一种可能的设计中,所述第一驱动件包括第一磁性件和第一线圈,所述第一线圈设于所述第一基座,所述第一磁性件与所述第二基座连接;
33.所述第二驱动件包括第二磁性件和第二线圈,所述第二线圈设于所述第一基座,
所述第二磁性件与所述第二支撑件连接。
34.本技术中,第一线圈通电后产生磁场,在磁场作用下,第一磁性件作为动子带动第二基座转动,进而带动工作镜体绕y轴转动。第二线圈通电后产生磁场,在磁场作用下,第二磁性件作为动子给第二支撑件特定的激励,使第二支撑件处于持续振动状态,进而带动工作镜体绕x轴转动。
35.在一种可能的设计中,所述第一驱动件至少为四个,四个所述第一驱动件分别布于所述工作镜体的四个角端,且呈对角设置的两个所述第一驱动件的连线与另一对角设置的两个所述第一驱动件的连线互相垂直。
36.本技术中,四个第一驱动件的安装位置的对角线与x轴,y轴构成的坐标轴夹角为45
°
,使得整体结构更加紧凑,有利于激光振镜整体结构小型化设计。
37.在一种可能的设计中,所述激光振镜还包括检测组件和控制组件,所述检测组件包括反射镜、传感器和发光部;
38.所述反射镜安装于所述第二支撑件,所述传感器与所述发光部安装于所述第一基座,所述发光部用于发射光线,所述传感器用于检测经所述反射镜反射的光线信号,并将所述光线信号传递至所述控制组件,所述控制组件控制所述第一驱动件调整所述工作镜体转动角度。
39.本技术中,反射镜的反光面面向发光部与传感器设置,反射镜粘接在第二支撑件的一端,工作镜体粘接在第二支撑件的另一侧,使反射镜与工作镜体同步转动。在工作镜体转动时,反射镜与工作镜体偏转的角度相同,以测得工作镜体偏转角度信息,提高转动角度测量范围。控制组件通过获取的转动角度信息与待测目标的位置进行分析,控制第一驱动件调整第二基座的转动角度,以调整工作镜体绕y轴转动角度,控制第二驱动件给第二支撑件的初始激励,调整第二支撑件的振动角度,以调整工作镜体绕x轴转动角度,提高测量待测目标的精度。
40.传感器可以为光电传感器,光电传感器测量范围大,测量精度高,结构紧凑。或者,传感器还可采用电涡流传感器、电容/电阻传感器等。
41.本技术还提供了一种激光雷达系统,所述激光雷达系统包括:
42.激光振镜,所述激光振镜为上述所述的激光振镜;
43.激光发射器,所述激光发射器输出的光线能够射至所述工作镜体,并经所述工作镜体反射至目标物体。
44.应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本技术。
附图说明
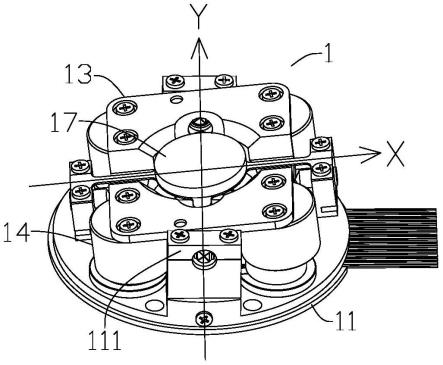
45.图1为本技术所提供激光振镜的结构示意图;
46.图2为本技术所提供激光振镜的结构示意图;
47.图3为图2另一视角的结构示意图;
48.图4为图2另一视角的结构示意图;
49.图5为图4沿a-a方向的剖视图;
50.图6为图4沿b-b方向的剖视图;
51.图7为本技术所提供第一支撑件与第二支撑件的结构示意图;
52.图8为本技术所提供检测组件的结构示意图。
53.附图标记:
54.1-激光振镜、11-第一基座、111、压块、12-第一支撑件、13-第二基座、14-第一驱动件、15-第二支撑件、16-第二驱动件、17-工作镜体、18-检测组件、181-反射镜、182-传感器、183-发光部、19-上盖。
55.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
具体实施方式
56.为了更好的理解本技术的技术方案,下面结合附图对本技术实施例进行详细描述。
57.在一种具体实施例中,下面通过具体的实施例并结合附图对本技术做进一步的详细描述。
58.本技术提供了激光雷达系统,该激光雷达系统用于发射光光束来探测目标物体的距离、位置及速度等特征量。激光雷达系统应用领域也越来越广泛,如无人驾驶、人工智能、军事、3d打印、vr/ar等众多场景。
59.激光雷达系统包括激光振镜1和激光发射器,激光发射器输出的光线能够射至激光振镜1,并经激光振镜1反射至待测的目标物体。
60.具体地,如图1至图6所示,该激光振镜1包括第一基座11、第一支撑件12、第二基座13、第一驱动件14、第二支撑件15、第二驱动件16和工作镜体17,第一支撑件12安装于第一基座11,且第一支撑件12的至少部分能够相对第一基座11运动;第二基座13与第一支撑件12连接,第二基座13能够相对第一基座11转动;第一驱动件14用于带动第二基座13绕自身轴线转动,即第一驱动件14通电后产生磁场,在磁场作用下,带动第二基座13绕自身轴线转动;第二支撑件15安装于第二基座13,并能够相对第二基座13转动;第二驱动件16用于带动第二支撑件15绕自身轴线转动,即第二驱动件16通电后产生磁场,在磁场作用下,带动第二支撑件15绕自身轴线转动;工作镜体17安装于第二支撑件15。
61.本实施例中,以工作镜体17中心为原点设置坐标轴(包括x轴,y轴),使第二基座13绕自身轴线转动中的轴线与y轴重合,使第二支撑件15绕自身轴线转动中的轴线与x轴重合。即,第一驱动件14通电后产生磁场,在磁场作用下,第一驱动件14能够带动第二基座13绕y轴转动,第二支撑件15安装于第二基座13,工作镜体17安装于第二支撑件15,进而使第一驱动件14通过第二基座13带动工作镜体17绕y轴转动。第二驱动件16通电后产生磁场,在磁场作用下,第二驱动件16能够给第二支撑件15特定的激励,使第二支撑件15绕x轴转动,工作镜体17安装于第二支撑件15,进而使第二支撑件15带动工作镜体17绕x轴转动。采用该激光振镜1,使照射在工作镜体17的单束光线路径,经工作镜体17转动反射出多束光线路径,增加经工作镜体17反射出的光线,进而增大光束扫描面积。并通过控制第一驱动件14调节工作镜体17绕y轴转动角度及转动频率,控制第二驱动件16调节工作镜体17绕x轴转动角度及转动频率,使经工作镜体17反射出的光束按照既定的扫描顺序扫描待测目标。
62.如图5和图7所示,在一种可能的设计中,第一支撑件12为柔性支撑件,第一支撑件
12设有固定端和转动端,转动端能够相对固定端转动,固定端与第一基座11连接,转动端与第二基座13连接,使第二基座13能够相对第一基座11转动。本实施例中,第一支撑件12为柔性支撑件,利用柔性支撑件作为第二基座13转动的结构支撑,可实现第二基座13高频率转动。
63.第一支撑件12可以为十字柔性轴承,十字柔性轴承是由弹片组成的一种结构简单、形状较为规则的柔性支撑结构,其回转中心与几何中心轴重合,利用均布在圆周径向弹性薄片的弹性变形进行工作,即可以绕自身回转中心实现有限角度范围内的转动。该十字柔性轴承具有无摩擦,无间隙,体积小,精度高,承载能力大等特点。利用十字柔性轴承作为支撑结构,在保证使用寿命的同时提高了工作镜体17的转角范围和转动频率。
64.此外,在激光振镜1断电的情况下,在十字柔性轴承的弹性作用下可带动工作镜体17回到中间位置,保证激光振镜1在断电状态的稳定性。
65.具体地,通过第一支撑件12作为第二基座13转动的支撑结构,使第二基座13转动频率可达到5~10hz,以使工作镜体17绕y轴转动频率为5~10hz,实现了高频率转动,如第二基座13转动频率可以为6hz、8hz、10hz,具体频率可通过控制第一驱动件14进行调整。
66.通过第一支撑件12作为第二基座13转动的支撑机构,使第二基座13转动角度可达到4
°
~7
°
,进而增大了工作镜体17绕y轴的转动角度。第二基座13带动工作镜体17绕y轴转动的角度范围为4
°
~7
°
,使工作镜体17能够绕y轴转动角度的范围在-7
°
~7
°
之间。
67.如图6和图7所示,在一种可能的设计中,第二支撑件15为柔性支撑件,该柔性支撑件具有弹性,利用柔性支撑件作为第二支撑件15能够转动的结构支撑,以实现第二支撑件15的高频率转动,并提高工作镜体17的转角范围。
68.第二支撑件15可以为柔性振片,第二驱动件16给柔性振片特定激励后,使柔性振片处于持续振动状态,即柔性振片利用本身的机械谐振特性带动工作镜体17绕x轴转动。利用柔性振片作为支撑结构,无需采用第二驱动件16持续控制第二支撑件15转动。
69.此外,在激光振镜1断电的情况下,在柔性振片的弹性作用下可带动工作镜体17回到中间位置,保证激光振镜1在断电状态的稳定性。
70.通过第二支撑件15作为工作镜体17支撑结构,使第二支撑件15转动频率可达到200~400hz,进而使工作镜体17绕x轴转动频率可达200~400hz,实现了高频率转动,如第二支撑件15动频率可以为200hz、250hz、300hz、400hz,具体频率可通过控制第二驱动件16给第二支撑件15的初始激励进行调整。
71.具体地,在第二驱动件16的激励下,第二支撑件15工作在一阶谐振状态,以持续带动工作镜体17绕x轴转动。一阶谐振为第二支撑件15自身固有的谐振频率,频率范围为200~400hz。
72.通过第二支撑件15作为工作镜体17支撑结构,使第二支撑件15转动角度可达到8
°
~12
°
,进而使工作镜体17绕x轴转动角度可达8
°
~12
°
,进而增大了工作镜体17绕x轴的转动角度。
73.如图3和图4所示,在一种可能的设计中,第一驱动件14为音圈电机。具体地,第一驱动件14为动磁式音圈电机。第一驱动件14包括第一磁性件和第一线圈,第一线圈安装于第一基座11,第一磁性件与第二基座13连接。第一线圈通电后产生磁场,在磁场作用下,第一磁性件作为动子带动第二基座13转动,进而带动工作镜体17绕y轴转动。
74.第一磁性件可以为磁钢。
75.如图5所示,第二驱动件16为音圈电机。具体地,第二驱动件16为动磁式音圈电机。第二驱动件16包括第二磁性件和第二线圈,第二线圈安装于第一基座11,第二磁性件与第二支撑件15连接。第二线圈通电后产生磁场,在磁场作用下,第二磁性件作为动子给第二支撑件15特定的激励,使第二支撑件15处于持续振动状态,进而带动工作镜体17绕x轴转动。
76.第二磁性件可以为磁钢。
77.在一种可能的设计中,第一驱动件14至少为四个,四个第一驱动件14分别布于工作镜体17的四个角端,且呈对角设置的两个第一驱动件14的连线与另一对角设置的两个第一驱动件14的连线互相垂直。四个第一驱动件14的安装位置的对角线与x轴,y轴构成的坐标轴夹角为45
°
,使得整体结构更加紧凑,有利于激光振镜1整体结构小型化设计。
78.进一步地,第一基座11是激光振镜1中不动部分的基础,为使第一驱动件14的反作用力不影响第一基座11,第一基座11具有足够的刚度(如从第一基座11的材质与厚度上提高自身的刚度)。第一支撑件12设置为两个,两个第一支撑件12沿y轴分布,第二基座13设置为两个,两个第二基座13沿y轴对称设置在工作镜体17的两侧,第一支撑件12的固定端通过第一基座11与第一基座11连接,第一支撑件12的转动端与对应的第二基座13连接,以通过第一支撑件12支撑第二基座13绕y轴转动,并限制第二基座13其他方向的运动。第二支撑件15的至少部分沿x轴延伸至与第二基座13连接,以实现第二支撑件15绕x轴转动,并限制第二支撑件15其他方向的运动。激光振镜1还包括上盖19,上盖19与第一基座11盖合形成容纳腔,第二基座13、第一支撑件12、第一驱动件14、第二支撑件15、第二驱动件16、工作镜体17和检测组件18均设置在该容纳腔内。
79.如图8所示,在一种可能的设计中,激光振镜1还包括检测组件18和控制组件,检测组件18包括反射镜181、传感器182和发光部183;反射镜181安装于第二支撑件15,传感器182与发光部183安装于第一基座11,发光部183用于发射光线,传感器182用于检测经反射镜181反射的光线信号,并将光线信号传递至控制组件,控制组件控制第一驱动件14调整工作镜体17转动角度。反射镜181的反光面面向发光部183与传感器182设置,反射镜181粘接在第二支撑件15的一端,工作镜体17粘接在第二支撑件15的另一侧,使反射镜181与工作镜体17同步转动。在工作镜体17转动时,反射镜181与工作镜体17偏转的角度相同,以测得工作镜体17偏转角度信息,提高转动角度测量范围。控制组件通过获取的转动角度信息与待测目标的位置进行分析,控制第一驱动件14调整第二基座13的转动角度,以调整工作镜体17绕y轴转动角度,控制第二驱动件16给第二支撑件15的初始激励,调整第二支撑件15的振动角度,以调整工作镜体17绕x轴转动角度,提高测量待测目标的精度。
80.传感器182可以为光电传感器,光电传感器测量范围大,测量精度高,结构紧凑。或者,传感器182还可采用电涡流传感器、电容/电阻传感器等。
81.需要指出的是,本专利申请文件的一部分包含受著作权保护的内容。除了对专利局的专利文件或记录的专利文档内容制作副本以外,著作权人保留著作权。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1