基于物联网技术的货车载重云端监控系统
1.本实用新型涉及智能交通控制领域,特别涉及一种基于物联网技术的货车载重云端监控系统。
背景技术:
2.随着信息社会的不断发展,各种技术的不断更新,不断满足着人们的要求,在发展的历程中,物联网技术是继计算机,互联网之后兴起的第三代浪潮,已经上升为战略性新兴产业。物联网包括各种信息传感器,全球定位系统,红外感受器等等,能够采集到各种所需要的信息,通过各类网络,实现人与物,物与物之间的交流通信,从而更好达到人们所需的管理监控等需求。
3.随着我国经济的快速发展,基础建设势头越来越迅猛,城市道路交通量迅速发展。公路基础设施建设取得突飞猛进的进步,伴随着这些的发展,车辆特别是货车的超载现象也愈发严重。大型工程运输车时常行驶于马路上,受一些既得利益的驱使,超载现象层出不穷。
4.传统的大型运输车的测量载重的方式还是以过地磅为主,载货前测车重,载货后测总重,进而计算出车辆的载重量,需要过两次地磅,不仅检测误差较大,而且会造成交通拥堵,直接影响运输企业和从业人员的工作效率。更加突出的问题是,车辆的载重较容易出现称重后加装货物进而继续超载,超载现象无法从根源上杜绝,企业社会等管理者也无法有效管理车辆载重,超载现象严重危害人民群众的生命财产安全。
技术实现要素:
5.为了克服上述现有技术的不足进而更好解决如今的超载现象,本实用新型提供了一种基于物联网技术的货车载重云端监控系统。实现动态监测货车载重,做到实时监测,实时显示,实时反馈,提高了测量的准确性和方便性。
6.本实用新型拟通过下述方案,解决上述提到的问题。
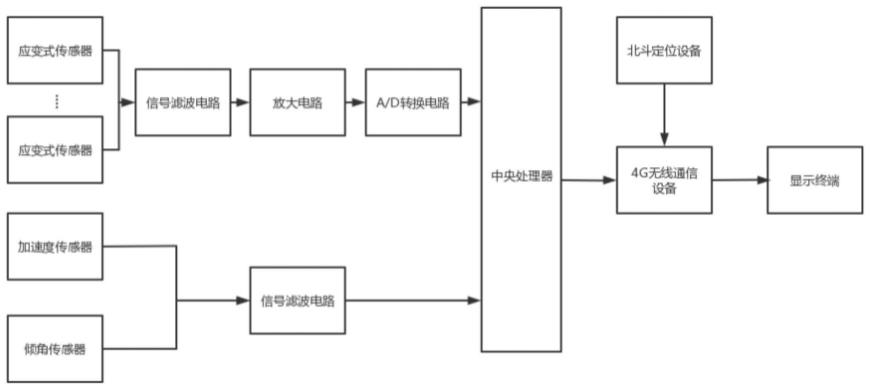
7.一种基于物联网技术的货车载重云端监控系统,该监控系统包括应变式传感器、信号滤波电路、放大电路、a/d转换电路、中央处理器、4g无线通信设备、北斗定位设备和显示终端;
8.所述应变式传感器安装于货车底部横桥承重点处,且每个货车的每个车轴上对称安装两个应变式传感器,用于采集货车载重引起的横桥形变信号;
9.所述信号滤波电路、放大电路、a/d转换电路、中央处理器、4g无线通信设备、北斗定位设备均安装在所述货车上;
10.所述信号滤波电路用于对所述应变式传感器采集的横桥形变信号进行滤波;
11.所述放大电路用于将所述信号滤波电路滤波后的信号进行放大;
12.所述a/d转换电路用于对所述放大电路放大后的信号进行模数转换;
13.所述中央处理器将当前时刻的车辆载重引起的横桥形变信号通过所述4g无线通
信设备发送给显示终端;
14.所述北斗定位设备通过所述4g无线通信设备将货车的位置实时发送给显示终端。
15.进一步地,所述监控系统还包括安装在货车上的加速度传感器和倾角传感器,分别用于采集货车行驶过程中的加速度和姿态信息,所述加速度和姿态信息通过所述信号滤波模块滤波后由所述中央处理器进行数据处理。
16.进一步地,所述4g无线通信模块选用移远4g cat 1。
17.本实用新型能够对静止或行驶状态中的货车进行实时的载重量监测,精确度较高。同时,本系统在监测重量的同时,能够监测到车辆的行驶状态和位置信息,同时这些信息能够通过4g无线通信设备传输至显示终端,管理者能够实时的了解到某一辆车的行驶状态和载重信息,进而作出管控,保证货车的行驶安全。同时,本系统安装较为简单,可实现在线固件升级,维护简单,利用率高。
附图说明
18.图1为本实用新型的系统原理图。
19.图2为应变式传感器安装位置图。
20.图3为信号滤波电路的其中一种实施方式的示意图。
21.图4为放大电路的其中一种实施方式的示意图。
22.图5为a/d转换电路的其中一种实施方式的示意图。
具体实施方式
23.下面根据附图和优选实施例详细描述本实用新型,本实用新型的目的和效果将变得更加明白,应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
24.本实用新型的基于物联网技术的货车载重云端监控系统,如图1所示,包括应变式传感器、加速度传感器、信号滤波电路、放大电路、a/d转换电路、中央处理器、北斗定位设备、4g无线通信设备和显示终端等。
25.应变式传感器采用bhf高精密级金属导体应变片,这种应变片具有高精度、全密封、温度自补偿、使用寿命长等特点,输出、输入电阻为1000ω
±
20ω,端子间绝缘强度为50mω,100v直流,盖胶后防护等级为ip67。安装位置如图2所示,安装于货车底部横桥感受重量之处,所安装个数与车轴个数相关,一个车轴靠近车轮处左右对称安装两个应变式传感器,感受横桥由于货物的重量引起的形变,通过不同的形变量输出不同大小的模拟电压信号,进而传输至下一模块。
26.为了保障信号的准确性并排除噪声等的干扰,设计如图3所示的信号滤波电路。信号滤波电路采用的是无源低通滤波,主要功能是消除高频信号对传感器信号的干扰。该信号滤波电路包括两个100欧姆的电阻,两个100pf的电容,组成rc无源低通滤波器。
27.放大电路如4所示,用于对来自应变式传感器的微小信号进行放大。此电路采用ina333芯片进行放大处理,通过控制r37的大小便可以控制放大倍数。ina333是一个自归零的精密仪表放大器,具有温度漂移低、共模抑制比高、低线性误差、高阻抗的特点。
28.a/d转换电路如图5所示,与放大电路相连,经过ina333放大后的信号仍属于中央
处理器不能识别的模拟信号,需要转换为数字信号,即a/d转换,采用ads1100芯片。ads1100芯片是全差分输入、高达16位分辨率、拥有自校准功能的a/d转换器,该芯片的自校准系统对于用户是透明的,同时片内拥有可编程的增益放大器pga可提供四种增益选择,具有良好性能。a/d转换电路将放大后的数字电压信号作为输入通过多条iic总线进入中央处理器处理。
29.加速度传感器和倾角传感器采用lsm6dsl芯片模块采集车辆的行驶状态,进而通过如图3所示的信号滤波电路消除高频信号对传感器信号的干扰,进而将信号包括速度、加速度和倾角等姿态信息传输至中央处理器。
30.中央处理器采用arm处理器,芯片为stm32f105rct6,这款mcu芯片是基于cortex-m3
tm
内核的32位微控制器,性能强劲,中央处理器模块对采集到的信息进行信息融合与数据处理,将当前时刻的车辆载重引起的横桥形变信号通过所述4g无线通信设备发送给云服务器。中央处理器持续不断输出某时刻的载重和姿态信息。
31.北斗定位设备如图1所示,安装于车内,用于监测车辆的位置信息,实时捕捉车辆位置,该位置信息可用于服务器端描绘位置曲线。
32.4g无线通信设备采用移远4g cat1,将中央处理器处理得到的数据和北斗定位设备所获得的车辆的位置信息,采用mqtt协议为主体,通过数据传输协议,共同发送至云服务器。无线通信设备是车辆联网的关键部分,硬件设备将数据通过网络传输模块上传至服务器,服务器就可以根据所上传的数据进行分析。
33.管理者可以从显示终端等处直接了解车辆的各种信息,包括车辆编号、车辆车主、最大载荷值、实际载荷值和位置信息等等。对于发现异常的车辆,对其及时作出管控,保障了运输的透明化安全性。该系统可利用远程监控平台,通过主控终端的数据解析及传输,对车辆源头的载重量进行安全监控,亦可以作为单独车辆货物重量显示仪与报警设备使用。
34.本领域普通技术人员可以理解,以上所述仅为实用新型的优选实例而已,并不用于限制实用新型,尽管参照前述实例对实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实例记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在实用新型的精神和原则之内,所做的修改、等同替换等均应包含在实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1