一种车载激光雷达探测系统及汽车的制作方法
1.本实用新型涉及汽车电子技术领域,特别涉及一种车载激光雷达探测系统及汽车。
背景技术:
2.随着科技的进步,各种车用控制系统逐渐向自适应的方向发展,并且越来越智能化。例如,在目前广泛使用的acc系统(自适应雷达巡航控制系统)中,通过设置汽车雷达检测车辆的行驶环境。
3.汽车雷达顾名思义是用于汽车或其他地面机动车辆的雷达。因此,它包括基于不同技术(比如激光、超声波、微波)的各种不同雷达,有着不同的功能(比如发现障碍物、预测碰撞、自适应巡航控制),以及运用不同的工作原理(比如脉冲雷达、fmcw雷达、微波冲击雷达)。
4.激光雷达传感器是智能驾驶汽车的关键传感部件,其探测精度高,范围也相对其他传感器更广。然而,现有的激光雷达传感器一般体积较大,为了充分发挥其探测范围,需要将其高架在车辆顶部或侧部,不仅影响了智能车辆的整体美观程度,而且其支架振动会影响探测精度。而激光雷达价值一般高达几万元,如果只是将其高架在车辆顶部或侧部,容易引起激光雷达被盗等问题,从而对车主带来较大的经济损失。
5.另外,架设在车辆外部的激光雷达传感器还容易受到外力碰撞而产生损坏。再者,现有激光雷达传感器在产品出厂时,其测量角度和范围就已经确定,车辆的设计者只能根据这个现有范围对其进行安装,灵活度较差。
6.此外,激光雷达在冬天处于寒冷的环境下时,激光雷达的镜面容易出现结霜的问题,使得激光雷达不能正常工作,造成对激光雷达的损坏,现有的激光雷达缺少保护功能。
7.基于此,本技术特提出车载激光雷达探测系统及汽车。
技术实现要素:
8.有鉴于此,本实用新型旨在提出一种车载激光雷达探测系统及汽车,以解决现有技术中激光雷达模块安装部外露容易引起的失窃问题,并且提高激光雷达模块检测的精准度。
9.为达到上述目的,本实用新型的技术方案是这样实现的:
10.一种车载激光雷达探测系统,包括设置在车体上的前置检测装置、后置检测装置、左侧检测装置、右侧检测装置和激光雷达模块,所述激光雷达模块固定在车体的顶部前横梁上,其中,所述激光雷达模块包括:
11.底座,所述底座固定在顶部前横梁上的安装槽内;
12.顶盖,所述顶盖固定在所述底座上,并且伸出所述安装槽,在所述顶盖与所述底座之间形成容腔;
13.激光雷达探测装置,所述激光雷达探测装置设置在所述容腔内。
14.进一步的,所述底座包括:
15.底板,在所述底板用于固定所述激光雷达探测装置;
16.第一连接壁,所述第一连接壁设置在所述底板的周向方向,在所述第一连接壁上设置第二连接孔,所述第二连接孔用于底座与顶部前横梁螺栓连接;
17.第二连接壁,所述第二连接壁设置在所述第一连接壁的上方,在所述第二连接壁上设置第三连接孔,所述第三连接孔用于底座与所述顶盖可拆卸连接。
18.进一步的,所述顶盖包括:
19.盖板,所述盖板从前至后呈弧形设置;
20.支撑板,所述支撑板设置在所述盖板的下端;
21.第一侧壁,所述第一侧壁设置两个,两个所述第一侧壁设置在所述盖板的两侧,在所述第一侧壁上设置第一连接孔;
22.第一翻板,所述第一翻板设置在所述支撑板的内侧端部且朝下设置。
23.进一步的,在所述底座与所述激光雷达探测装置之间设置减振装置。
24.进一步的,所述激光雷达模块设置两个,两个所述激光雷达模块分别设置在所述顶部前横梁靠近两端的两个安装槽内。
25.进一步的,每个所述激光雷达模块的检测扇形面积的夹角为α,两个所述激光雷达模块的检测外侧分别伸出所述车体的左侧端部或者右侧端部,两个所述激光雷达模块的检测内侧交叉重叠的扇形面积夹角为β,其中,β≤α。
26.进一步的,所述激光雷达模块的检测内侧交叉重叠的区域为车体正前方,β=α。
27.进一步的,所述左侧检测装置、右侧检测装置包括激光检测模块、摄像检测模块、红外检测模块中的任意一种或者多种检测模块,所述左侧检测装置、右侧检测装置设置在车门把手和/或后视镜上。
28.进一步的,所述前置检测装置包括摄像检测装置和红外检测装置,所述摄像检测装置设置在所述红外检测装置的上方。
29.相对于现有技术,本实用新型所述的车载激光雷达探测系统具有以下优势:
30.(1)本实用新型所述的车载激光雷达探测系统,通过将激光雷达探测装置的底座结构伸入所述顶部前横梁上的安装槽内或者车体内部,降低了激光雷达模块的设置高度,保证车载激光雷达探测的可靠性,同时避免激光雷达模块失窃。
31.(2)本实用新型所述的车载激光雷达探测系统,结构合理,连接便捷、稳定,同时提高了车载激光雷达安装后车辆整体美观性,同时能够有效降低激光雷达探测装置的安装高度,避免在使用时与其它结构造成干涉。
32.(3)本实用新型所述的车载激光雷达探测系统,通过在激光雷达探测装置的下方设置一个减振装置,防止激光雷达探测装置硬接触连接在振动或者晃动时,引起检测失真或者装置损坏等问题,该设置保证了激光雷达模块连接的稳定性和使用的可靠性。
33.本实用新型的另一个目的在于公开一种汽车,尤其是包含智能驾驶功能的汽车,在所述汽车上设置有如上述所述的车载激光雷达探测系统。
附图说明
34.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新
型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
35.图1为本实用新型实施例所述车体上激光雷达模块的右视结构示意图;
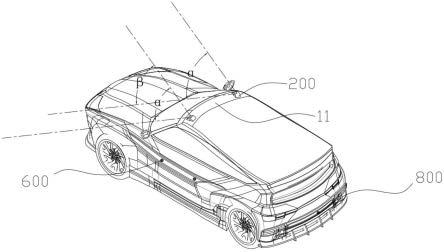
36.图2为本实用新型实施例所述车体上设置激光雷达模块位置的结构示意图;
37.图3为本实用新型实施例所述激光雷达模块的正视结构示意图;
38.图4为图3中a-a的剖视结构示意图;
39.图5为本实用新型实施例所述底座的侧视结构示意图;
40.图6为本实用新型实施例所述顶盖的侧视结构示意图;
41.图7为本实用新型实施例所述顶盖的右视结构示意图;
42.图8为图7中b-b的剖视结构示意图;
43.图9为本实用新型实施例所述激光雷达探测装置的结构示意图;
44.图10为本实用新型实施例所述激光雷达探测装置的侧视结构示意图;
45.图11为本实用新型实施例2中所述激光雷达模块的爆炸结构示意图;
46.图12为本实用新型实施例2中所述激光雷达模块的剖视结构示意图;
47.图13为本实用新型实施例2中所述底座的俯视结构示意图;
48.图14为本实用新型实施例2中所述减振装置的结构示意图;
49.图15为本实用新型实施例2中所述减振装置的侧视结构示意图;
50.图16为本实用新型实施例2中所述激光雷达探测装置的侧视结构示意图;
51.图17为本实用新型实施例3中所述车载雷达系统探测系统第一视角的侧视结构示意图;
52.图18为本实用新型实施例3中所述车载雷达系统探测系统第二视角的侧视结构示意图;
53.附图标记说明:
54.车体100,顶部前横梁11,安装槽12,激光雷达模块200,摄像检测装置 300,红外检测装置400,右侧检测装置500,左侧检测装置600,前置检测装置 700,后置检测装置800,顶盖1,高透部101,普通透光部102,支撑板103,第一翻板104,第二翻板105,第一侧壁106,第一槽口107,第一连接孔108,盖板109,底座2,底板201,第一连接壁202,第二连接壁203,限位台阶204,第二连接孔205,第三连接孔206,第一限位槽207,第四连接孔208,第一定位槽209,激光雷达探测装置3,连接板301,激光雷达本体302,第五连接孔303,第二限位槽304,第二定位槽305,减振装置4,减震垫本体401,定位凸台402,第六连接孔403,固定螺栓5,容腔6。
具体实施方式
55.为了使本实用新型的技术手段及达到目的与功效易于理解,下面结合具体图示对本实用新型的实施例进行详细说明。
56.需要说明,本实用新型中所有进行方向性和位置性指示的术语,诸如:“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“内”、“外”、“顶”、“低”、“横向”、“纵向”、“中心”等,仅用于解释在某一特定状态(如附图所示)下各部件之间的相对位置关系、连接情况等,仅为了便于描述本实用新型,而不是要求本实用新型必须以特定的方位构造和操作,因此不
能理解为对本实用新型的限制。另外,在本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。
57.在本实用新型的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
58.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
59.实施例1
60.如图1~10所示,本实用新型公开了一种车载激光雷达安装结构,包括激光雷达模块200,所述激光雷达模块200固定在车体100的顶部前横梁11上,其中,所述激光雷达模块200包括:
61.底座2,所述底座2固定在顶部前横梁11上的安装槽12内;
62.顶盖1,所述顶盖1固定在所述底座2上,并且伸出所述安装槽12,在所述顶盖1与所述底座2之间形成容腔6;
63.激光雷达探测装置3,所述激光雷达探测装置3设置在所述容腔6内。
64.本实用新型公开了一种车载激光雷达安装结构,通过在车体100的顶部前横梁11上设置至少一个安装槽12,避免激光雷达探测装置3直接固定在车顶上方带来的连接不稳定问题和可能存在的易于失窃风险,将激光雷达模块200的底座2固定在该安装槽12内,底座2与顶部前横梁11的安装槽12可拆卸固定,将激光雷达探测装置3固定在底座2上,激光雷达探测装置3的上端伸出安装槽12,激光雷达探测装置3能够向车体100的前后两侧或者四周进行探测,将顶盖1盖设在所述激光雷达探测装置3的上方,对激光雷达探测装置3进行安全保护,顶盖1与底座2可拆卸连接,保证顶盖1防护激光雷达探测装置3的可靠性。
65.本实用新型公开了一种车载激光雷达安装结构,通过将激光雷达探测装置3 的底座结构伸入所述顶部前横梁11上的安装槽12内或者车体100内部,降低了激光雷达模块200的设置高度,保证车载激光雷达探测的可靠性,同时避免激光雷达模块200失窃。
66.作为本实用新型的一个较佳示例,所述底座2包括:
67.底板201,在所述底板201用于固定所述激光雷达探测装置3;
68.第一连接壁202,所述第一连接壁202设置在所述底板201的周向方向,在所述第一连接壁202上设置第二连接孔205,所述第二连接孔205用于底座2与顶部前横梁11螺栓连接;
69.第二连接壁203,所述第二连接壁203设置在所述第一连接壁202的上方,在所述第二连接壁203上设置第三连接孔206,所述第三连接孔206用于底座2 与所述顶盖1可拆卸连接。
70.作为本实用新型的示例,在所述顶盖1上设置第一翻板104,所述第一翻板 104可
以伸入所述第二连接壁203的内侧与底座2卡接或者通过连接螺栓连接,或者,所述第一翻板104套接在所述第二连接壁203的外侧与底座2卡接或者通过连接螺栓连接。
71.作为优选,在所述第一连接壁202与所述第二连接壁203的连接处形成限位台阶204。所述限位台阶204用于支撑所述顶盖1上的第一翻板104。
72.具体的,所述第二连接壁203设置在所述第一连接壁202的上方且呈向内侧收缩的结构设置,所述限位台阶204形成在所述第二连接壁203的外侧,所述第一连接壁202与所述安装槽12配合后,将第二连接孔205以及安装槽12 内的连接孔通过连接螺栓实现底座2与顶部前横梁11连接,所述顶盖1上的第一翻板104设置在所述第二连接壁203与安装槽12内壁之间的限位台阶204上,所述顶盖1与第二连接壁203上设置第三连接孔206可以通过连接螺栓实现顶盖1与第二连接壁203连接,也可以通过连接螺栓将顶盖1上的第一翻板104、顶部前横梁11、第二连接壁203进行三者连接。
73.该设置进一步保证底座2与顶部前横梁11、顶盖1连接的便捷性和稳定性,同时能够适用于多种车辆,提高其适用范围。
74.作为本实用新型的示例,所述第二连接孔205与所述第三连接孔206分别设置在所述底板201的两侧。
75.当第二连接孔205与所述第三连接孔206分别设置在所述底板201的两侧时,此时,底座2与顶部前横梁11的固定形成在底板201的下方,此时,激光雷达探测装置3与底板201可以固定为一体,该设置进一步提高了激光雷达模块200防失窃的可靠性。
76.亦或者是,所述第二连接孔205与所述第三连接孔206均设置在所述底板 201的上方。该设置能够有效降低激光雷达探测装置3伸出所述安装槽12的高度,提高车载激光雷达安装的整体性和美观性,避免在使用时与其它结构造成干涉。
77.作为本实用新型的一个较佳示例,所述顶盖1包括:
78.盖板109,所述盖板109从前至后呈弧形设置;
79.支撑板103,所述支撑板103设置在所述盖板109的下端;
80.第一侧壁106,所述第一侧壁106设置两个,两个所述第一侧壁106设置在所述盖板109的两侧,在所述第一侧壁106上设置第一连接孔108;
81.第一翻板104,所述第一翻板104设置在所述支撑板103的内侧端部且朝下设置。
82.该设置公开了一种顶盖1结构,通过设置穹顶状的盖板109,保证顶盖1的外露结构与车体的流线型保持一致或者接近,降低车辆在行驶过程中由于风力或者振动造成顶盖1松动,而盖板109的下端设置的支撑板103,能够使得顶盖 1支撑在顶部前横梁11或者车体外壳上,在所述支撑板103的内侧朝下设置的第一翻板104,能够卡入所述第二连接壁203与安装槽12内壁之间的限位台阶 204上,避免异物或者水滴进入容腔6内,且保证盖板109固定可靠。
83.作为本实用新型的一个较佳示例,在所述第一侧壁106上设置第一槽口107,所述第一连接孔108设置在所述第一槽口107内,所述第一连接孔108与所述第二连接壁203上的第三连接孔206通过连接螺栓连接。
84.作为优选,在所述第一槽口107上设置有装饰盖或者装饰塞。所述装饰盖能够盖接在所述第一槽口107上,或者,所述装饰塞能够塞入所述第一槽口107 内。该设置用于对固定所述顶盖1和所述底座2的连接螺钉进行装饰,提高顶盖1和所述底座2连接的密封性,同
时提高了激光雷达模块200防盗的可靠性。
85.作为本实用新型的一个较佳示例,所述顶盖1还包括:
86.第二翻板105,所述第二翻板105设置在所述支撑板103的内侧端部且朝上设置。
87.所述第二翻板105设置在所述第二连接壁203的外侧,该设置进一步提高了所述顶盖1和所述底座2连接的可靠性,同时也增强了防止异物进入容腔6 的功能,保证激光雷达探测装置3使用可靠。
88.作为本实用新型的一个较佳示例,所述盖板109包括:
89.高透部101,所述高透部101形成在所述盖板109上靠近中间的位置;
90.普通透光部102,所述普通透光部102形成在所述盖板109上靠近两端的位置。
91.其中,高透部101能够用于激光雷达探测装置3的出射激光和反射激光高效率透过,普通透光部102为正常的透光部分。
92.该设置能够减少激光的损耗和干扰,提高激光雷达的精准度和分辨率。
93.实施例2
94.如图1~16所示,本实用新型公开了一种车载激光雷达安装结构,包括激光雷达模块200,所述激光雷达模块200固定在车体100的顶部前横梁11上,其中,所述激光雷达模块200包括:
95.底座2,所述底座2固定在顶部前横梁11上;
96.顶盖1,所述顶盖1固定在所述底座2上,并且伸出所述安装槽12,在所述顶盖1与所述底座2之间形成容腔6;
97.激光雷达探测装置3,所述激光雷达探测装置3设置在所述容腔6内;
98.减振装置4,所述减振装置4设置在所述底座2与所述激光雷达探测装置3 之间,其它结构同实施例1。
99.该设置通过在激光雷达探测装置3的下方设置一个减振装置4,所述减振装置4在所述激光雷达探测装置3颠簸或者受压时结构变形,从而使得车辆在行驶过程中,车辆出现振动或者颠簸时,防止激光雷达探测装置硬接触连接在振动或者晃动时,引起检测失真或者装置损坏等问题,该设置保证了激光雷达模块200连接的稳定性和使用的可靠性。
100.作为本实用新型的一个较佳示例,所述激光雷达探测装置3包括激光雷达本体302和连接板301,在所述连接板301上设置第五连接孔303,在所述底板 201上设置第四连接孔208,所述第五连接孔303与所述第四连接孔208通过固定螺栓5进行固定。
101.作为本实用新型的示例,所述激光雷达本体302设置在所述连接板301上表面靠近中心的位置,所述第五连接孔303设置在所述连接板301的四个角上。该设置保证了激光雷达探测装置3与底座2安装的便捷性和连接的稳定性。
102.作为本实用新型的一个较佳示例,所述减振装置4包括:
103.减震垫本体401,所述减震垫本体401呈矩形设置;
104.定位凸台402,所述定位凸台402设置在所述减震垫本体401的上表面和/ 或下表面。
105.作为本实用新型的示例,所述减振装置4由橡胶材料制备而成,该设置一方面便于减振装置4的快速定位和安装,同时也保证了减振装置4减振功能的可靠性。
106.作为本实用新型的一个较佳示例,在所述底板201的上表面设置第一限位槽207,
所述第一限位槽207用于容纳限位所述减震垫本体401的下表面,在所述第一限位槽207内设置第一定位槽209。
107.该设置使得所述减振装置4的减震垫本体401设置在第一限位槽207内,减震垫本体401下表面的定位凸台402插入所述第一定位槽209内进行快速定位和限位,避免减振装置4在使用过程中由于振动产生位移,保证减振装置4 工作的可靠性。
108.作为本实用新型的一个较佳示例,在所述连接板301的下表面设置第二限位槽304,所述第二限位槽304用于容纳限位所述减震垫本体401的上表面,在所述第二限位槽304内设置第二定位槽305。
109.该结构使得减振装置4与激光雷达探测装置3安装时能够进行快速定位和限位,进一步提高了减振装置4减振工作的可靠性。
110.作为本实用新型的示例,所述减振装置4设置多个,分别布置在所述连接板301靠近四个角的位置和靠近中心处的位置。
111.该设置综合提高了减振装置4减振工作的可靠性。
112.作为本实用新型的一个较佳示例,在所述第一限位槽207内设置第四连接孔208,在所述第二限位槽304内设置第五连接孔303,在所述减震垫本体401 上设置第六连接孔403,所述固定螺栓5依次穿过第五连接孔303、第六连接孔 403后插入第四连接孔208内螺纹固定。
113.该设置既保证了减振装置4连接稳定,又提高了底座2、激光雷达探测装置 3以及减振装置4安装的效率。
114.作为本实用新型的一个较佳示例,所述底座2与所述顶部前横梁11固定的连接螺栓、所述顶盖1与所述底座2固定的连接螺栓以连接底座2、激光雷达探测装置3以及减振装置4固定的固定螺栓5采用防盗螺栓。
115.实施例3
116.如图1~18所示,本实用新型还公开了一种车载激光雷达探测系统,包括设置在车体100上的前置检测装置700、后置检测装置800、左侧检测装置600、右侧检测装置500和激光雷达模块200,所述激光雷达模块200设置在车体100 的顶部前横梁11上,其中,所述激光雷达模块200包括:
117.底座2,所述底座2固定在顶部前横梁11上的安装槽12内;
118.顶盖1,所述顶盖1固定在所述底座2上,并且伸出所述安装槽12,在所述顶盖1与所述底座2之间形成容腔6;
119.激光雷达探测装置3,所述激光雷达探测装置3设置在所述容腔6内。
120.所述激光雷达模块200的安装结构采用如实施例1或者如实施例2中安装结构,在此不再重复赘述。
121.作为本实用新型的示例,在所述车体100上的前置检测装置700、后置检测装置800、左侧检测装置600、右侧检测装置500的功能与使用模式与现有技术相同或者类似,而通过在在车体100的顶部前横梁11上安装槽12内设置的激光雷达模块200与前置检测装置700、后置检测装置800、左侧检测装置600、右侧检测装置500的结合检测,为本领域技术人员根据需要结合能够实施的方式进行结合,该部分内容不是本技术的改进点,在此不再具体赘述。
122.作为本实用新型的一个较佳示例,所述激光雷达模块200设置两个,两个所述激光雷达模块200分别设置在所述顶部前横梁11靠近两端的两个安装槽12 内。
123.优选的,每个所述激光雷达模块200的检测扇形面积的夹角为α,两个所述激光雷达模块200的检测外侧分别伸出所述车体100的左侧端部或者右侧端部,两个所述激光雷达模块200的检测内侧交叉重叠的扇形面积夹角为β,其中,β≤α。
124.该设置使得激光雷达模块200能够精准的对车体100前方的障碍物进行检测,尤其是在高速行驶时,精准检测车辆与周围障碍物的距离,保证车辆行驶可靠,同时避免单个激光雷达模块200发生故障或者检测异常时引起的检测失准问题。
125.作为本实用新型的一个较佳示例,所述激光雷达模块200的检测内侧交叉重叠的区域为车体正前方,β=α。
126.该设置进一步提高了本发明所述的车载激光雷达探测系统使用的可靠性和检测的精准性。
127.作为本实用新型的一个较佳示例,所述左侧检测装置600、右侧检测装置 500包括激光检测模块、摄像检测模块、红外检测模块中的任意一种或者多种检测模块,所述左侧检测装置600、右侧检测装置500设置在车门把手和/或后视镜上。
128.作为本实用新型的一个较佳示例,所述前置检测装置700包括摄像检测装置300和红外检测装置400,所述摄像检测装置300设置在所述红外检测装置 400的上方。作为本实用新型的示例,所述摄像检测装置300采用广角摄像头,所述红外检测装置400用于红外测距。将摄像检测装置300设置在上方,能够保证摄像检测装置300拍摄图像录入的角度和范围,而将红外检测装置400设置的下方,保证车体与障碍物之间距离检测的精准性,尤其是对于结构较小的障碍物,避免车辆与障碍物发生接触造成的结构损坏。
129.作为本实用新型的一个较佳示例,所述后置检测装置800与前置检测装置 700的结构类似,在此不再具体赘述。
130.作为本实用新型的示例,如图18所示,在所述车体100的顶部前横梁11 上靠近中部的位置设置一个激光雷达模块200,所述激光雷达模块200中的激光雷达探测装置3能够相对所述底座2发生转动运动。
131.本实用新型还公开了一种汽车,尤其是包含智能驾驶功能的汽车,在汽车上设置有如上述实施例所述的车载激光雷达安装结构或者车载激光雷达探测系统。
132.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1