车辆运动传感器的制作方法
1.本实用新型涉及一种车辆运动传感器,尤其涉及一种用于车辆的光学运动跟踪传感器系统。
背景技术:
2.自主驾驶系统依赖于车辆位置和运动的精确跟踪。为此,传统系统通常使用全球定位系统(gps)传感器与车辆的防抱死制动传感器(abs)相结合。然而,这种方法在某些情况下可能是不准确的。例如,gps传感器在嘈杂的环境中失去准确性,并且当车辆在被屏蔽的建筑物内或地下时可能变得完全不起作用。同样,虽然abs转速计在较高速度下是精确的,但是它们的分辨率对于在低速情况下的精确位置确定来说通常太低,例如当车辆处于交通堵塞中时。例如,车辆的车轮可能由于轮胎压力和磨损的变化而具有不同的半径,并且车轮可能未对准。这样,即使在相对精确地测量车轮旋转并且测量不同车轮之间的旋转差的情况下,仍然难以精确地确定纵向运动或偏航。例如,如果车辆处于交通堵塞中,则不能以任何精度确定车辆是否已经切换车道或转向以避开障碍物。照此,在这些情况下,自主驾驶系统可能失去对车辆所处的精确位置的认识。
3.已经努力改进基于abs的系统的精度。例如,jp 4824522 b2公开了使用摄像机图像识别道路标记以校准其车轮旋转计。具体地,这通过跟踪高速公路上的白线道路标记来实现,并且基于具有固定尺寸和间隔的白线道路标记来确定车轮旋转与距离的系数。然而,这种系统仍然依赖于车轮旋转来确定实际行驶距离。这样,当在低速下使用该测量时,由于车轮旋转的数量相对较少,因此其精度仍然受到限制。此外,该系统依赖于白线道路标记是一致的,这在现实世界场景中并不总是如此,尤其是在标记可能被磨损或褪色的旧道路上。此外,这种系统没有解决测量车辆偏航的问题。
4.鉴于以上所述,仍然需要一种用于确定车辆运动的改进的传感器。
技术实现要素:
5.根据第一方面,提供了一种用于在路面上行驶的车辆的车辆运动传感器,包括:光电传感器,用于在相对于所述车辆的第一位置处接收来自所述路面上的第一采样区域的光,并生成所述第一采样区域中路面不规则性的像素图案图像;以及处理器,用于对所述第一采样区域的像素图案图像进行采样,并使用所述第一采样区域的顺序采样的像素图案图像的数字图像相关性来确定所述车辆的运动。
6.以这种方式,车辆的运动可以基于路面的连续光电图像之间的像素图案的互相关,以类似于光学计算机鼠标如何跟踪表面上的运动的方式被精确地跟踪。即,由例如其表面粗糙度和纹理以及其颗粒组成引起的路面中的小差异可被检测为由光电传感器拍摄的图像中的像素图案。当车辆移动时,所识别的像素图案将在每个后续样本图像中偏移。该光流然后可以由处理器确定以计算车辆移动的距离。因此,通过对来自光电传感器的图像进行采样,由此可以连续地跟踪车辆的运动。此外,该跟踪能够确定在路面的二维平面上的任
何方向上的甚至很小的运动,并且因此能够精确地测量向前/向后运动以及偏航运动。重要的是,该系统不需要诸如道路标记的道路特征的图像识别,这将需要使用复杂的多帧处理来定位高分辨率图像中的特征并跟踪3d空间中的运动。相反,所描述的运动传感器可以跟踪来自低分辨率光电传感器的顺序采样图像中的像素图案的2d运动,从而简化处理并允许使用相对低成本的部件。
7.在实施方式中,所述光电传感器还用于在相对于所述车辆的第二位置处接收来自路面上的第二采样区域的光,其中所述第二位置比所述第一位置离所述光电传感器更远,并且其中所述处理器还用于对所述第二采样区域的像素图案图像进行采样,并且使用所述第二采样区域的顺序采样的像素图案图像的数字图像相关性来确定所述车辆的运动。以此方式,可以基于来自路面的第二区域的像素图案来跟踪车辆的运动,该第二区域进一步远离光电传感器。这样,由于视角的影响,对于形成图像的相同数量的像素,采样表面区域的尺寸可以更大。这提供了在其中跟踪像素图案的更大区域,并且因此可以允许在更高速度下的改进的运动检测。优选地,第二位置是在第一位置的前面或后面的另一距离。
8.在实施方式中,处理器包括输出端,该输出端用于使用第一采样区域和第二采样区域之一的采样像素图案图像的数字图像相关性来输出该车辆的所确定的运动;并且其中,该处理器被配置成当该车辆速度低于预定阈值时使用第一采样区域的像素图案图像输出所确定的运动,并且其中,该处理器被配置成当该车辆速度高于预定阈值时使用第二采样区域的像素图案图像输出所确定的运动。这样,当车辆以较低速度行驶时,使用第一采样区域确定运动,从而在低速时提供更大的精度。相反地,在较高速度下,使用第二采样区域来确定运动,该第二采样区域提供了更大的区域,从而允许即使当图案相对于传感器快速移动时也能被跟踪。
9.在实施方式中,处理器被配置成与车速增加超过预定阈值成比例地增加第二位置距光电传感器的距离。以这种方式,一旦车辆的速度高于阈值,被采样以确定运动的路面区域随着车辆速度的增加而进一步远离光电传感器移位。这逐渐增加了被采样的路面区域的尺寸,并且因此当表面图案相对于光电传感器更快速地移动时提供了改进的跟踪。
10.在实施方式中,车辆运动传感器还包括用于将光聚焦到光电传感器上的透镜。这样,可以使用透镜将光聚焦到光电传感器的成像器平面上。由此,能够对路面的大区域的反射光进行聚光检测。在实施方式中,所述透镜是用于提供广角视图的鱼眼透镜。在实施方式中,所述透镜可以是用于将来自第一和第二采样区域的反射光聚焦到光电传感器上的广角透镜。
11.在实施方式中,透镜和光电传感器被配置成为第一采样区域的图像提供5cm或更大的景深。在实施方式中,透镜和光电传感器被配置成在路面上方和下方提供2.5cm或更大的景深。这样,运动传感器可以容许车辆相对于路面的垂直运动,该垂直运动例如由路面自身的特征或车辆底盘在其悬架上的运动引起。
12.在实施方式中,透镜将路面的图像聚焦到光电传感器上,聚焦的图像包含第一采样区域和第二采样区域。这样,第一和第二采样区域都可以由单个光电传感器覆盖,因此该光电传感器可以固定在车辆的固定位置。在实施方式中,光电传感器可以固定到车辆的底盘上。
13.在实施方式中,光电传感器包括cmos成像器。这样,可以提供低成本、高刷新率的
成像器。此外,在实施方式中,cmos成像器可与图像处理器集成以提供组合组件。由此提供了更紧凑且成本有效的组件。
14.在实施方式中,光电传感器可以被设置为摄像机组件。摄像机组件可以包括透镜和成像器。
15.在实施方式中,处理器在确定车辆运动时应用卡尔曼滤波。这样,可以对像素图案的检测位置中的噪声进行滤除,以产生车辆运动的更精确的确定。
16.在实施方式中,车辆运动传感器还包括用于照亮第一和/或第二采样区域的光源。这样,可以从预定方向以一致的方式将光施加到采样区域。这样,由成像器接收的来自表面粗糙的反射不容易受到外部照明条件的影响。
17.在实施方式中,车辆运动传感器还包括用于将光源发射的光聚焦到第一和/或第二采样区域上的光源透镜。这样,受控光源可以在采样期间将光施加到集中区域。在实施方式中,透镜可以用于在将光施加到第一采样区域和第二采样区域之间切换,使得单个光源可以用于将光强烈地聚焦在一个或另一个区域上。
18.在实施方式中,光源是紫外光源和红外光源之一。在这样的实施方式中,可以使用紫外或红外光电传感器。这样,可以使用与可见光谱中的光不同的光频率来确定运动。这样,由成像器接收的来自路面的反射较不易于受到外部照明条件的影响。
19.在实施方式中,车辆运动传感器还包括用于屏蔽光电传感器的屏蔽结构。这样,防止了光电传感器在车辆运行期间积聚碎屑。这样,减轻了被光电传感器透镜上的污垢或其它沉积物损害的采样图像的问题。这在传感器设置在车辆底盘上的实施方式中是有利的。
20.在实施方式中,处理器具有500hz或更高的采样率。这样,以更高的速度快速地拍摄像素图案图像以提供精确的运动确定。由于像素图案图像可以具有相对较低的分辨率,从而使图像处理计算的复杂性最小化,因此有利于以这种速率处理数据。
21.在实施方式中,所确定的车辆运动包括速度和偏航。以这种方式,车辆的纵向和横向运动都可以被确定,这与传统的abs传感器形成对比,传统的abs传感器仅可以提供在向前或向后方向上的纵向测量。
附图说明
22.现在将参照附图来描述说明性实施方式,其中:
23.图1示出了根据第一实施方式的车辆运动传感器的示意图;
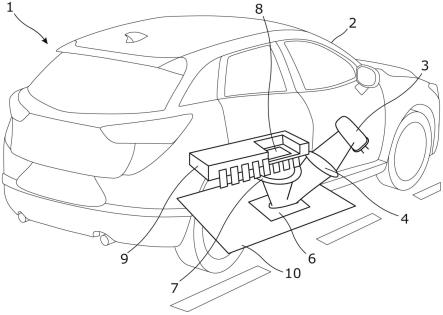
24.图2示出了当车辆以低速行驶时第二实施方式的车辆运动传感器的侧视图;
25.图3示出了当车辆以高速行驶时第二实施方式的侧视图;以及
26.图4示出了结合有根据第三实施方式的车辆运动传感器的车辆的平面图。
具体实施方式
27.图1示出了结合到车辆2中的车辆运动传感器1的示意图。为了说明的目的,传感器1的部件被放大示出,并且应当理解,这些部件在实际中明显更小。
28.车辆运动传感器1包括包含cmos成像器8的图像处理器芯片,cmos成像器8提供用于检测入射光并基于检测到的光输出像素图案图像的光电传感器。图像处理器芯片位于车辆2的底盘的中心,使得cmos成像器8接收从路面10向上反射的光。在该实施方式中,成像器
是红外成像器。
29.提供成像器透镜7用于将来自路面10的第一采样区域6的反射红外光聚焦到cmos成像器8上。第一采样区域6位于相对于车辆2的预定位置,并因此当车辆2在路面10上移动时,将在第一采样区域6内对不同路段的道路进行采样。
30.在该实施方式中,还提供红外led 3,用于用红外光照射第一采样区域6。在其它实施方式中,可以使用其它光源,例如包括紫外led或广谱光源的光源。照明透镜4用于将红外光引导并聚焦到第一采样区域6上,红外光从第一采样区域6向上反射回cmos成像器8上。
31.如将理解的,表面不是完全平坦的,并且甚至平滑的表面包括粗糙和组成差异。对于例如由混凝土、粘合剂和水泥的混合物形成的沥青的路面尤其如此。此外,路面还可以包括由例如铺设期间使用的工序产生的纹理特征。例如,压路机的滚筒可以产生表面图案。同样地,道路材料的风化在围绕聚集体的基质中可能更显著,这也可能导致表面的差异。这些变化导致表面不规则。这样,当光从路面反射并反射到cmos成像器8上时,其在由cmos成像器8形成的合成像素图像中产生图案。例如,相对光滑的聚集体颗粒或粗糙的平滑尖端可以反射比周围粗糙区域更大量的光。因此,这可以产生由像素图案图像中的较暗像素包围的较亮像素的簇。相反,路面中的空腔可以产生由较亮像素包围的较暗像素的簇。
32.在使用中,图像处理器芯片分析由cmos成像器8检测的图像帧。在该实施方式中,这发生在500hz的采样率。每个图像将包括表示第一采样区域6的路面10中的不规则性的像素图案。如果车辆是静止的,则连续图像中的像素图案将保持基本恒定,容忍传感器噪声和光输出变化。相反地,如果车辆2移动,则被采样的路面的物理区域将在每个帧中移位,使得新的路段包括一些先前区域以及新采样的道路区域。这样,当cmos成像器8相对于产生这些图案特征的表面移动时,像素图案将偏移。这样,该偏移可用于确定车辆相对于路面的运动。即,图像处理器芯片基于采样图像中像素图案的移动,将顺序采样像素图案图像的数字图像相关性应用于跟踪车辆的运动。
33.图2示出了结合到以低速行驶的车辆中的第二实施方式的车辆运动传感器的侧视图。该实施方式类似于第一实施方式,除了成像器透镜作为成像器组件结合到cmos成像器8中,并且照明透镜结合到光源3中。此外,提供屏蔽鳍片11,用于将碎片从光源3和cmos成像器8移走。
34.本实施方式中的成像器透镜是广角鱼眼透镜,使得cmos成像器8能够聚焦来自路面的较宽区域的光。与第一实施方式一样,红外光从光源3向下发射到路面10上。光向上反射回cmos成像器8,并且图像被馈送到处理器9用于图像处理。然而,在该实施方式中,因为cmos成像器8具有较宽的视场,所以由处理器9对所接收到的完整图像进行分割,并且基于对应于第一采样区域6的图像部分来确定车辆2的运动。
35.在该实施方式中,cmos成像器8还被配置成在路面10的任一侧具有5cm的景深13。这允许路面10的高度变化,例如减速带,以及车辆底盘在其悬架上上下移动时的垂直行程。这样,cmos成像器8可以垂直向上或向下移动高达5cm,而不会不利地损害采样图像中产生的像素图案。当传感器8相对于路面10垂直移动时,图像处理器可以考虑像素图案的相对尺寸的变化。
36.如图2所示,第一采样区域6基本上位于cmos成像器8下方。这对于在较低速度下的移动确定是有效的,因为cmos成像器8具有第一采样区域6的相对均匀的视图。然而,当车辆
2以更高的速度行驶时,路面10经过第一采样区域6的速度对于有效的图像处理来说可能太快。即,对于要在连续的图像帧中精确跟踪的所得像素图案来说,第一采样区域6可能过快地越过表面不规则性。为了减轻这种情况,处理器9可以切换到基于与远离cmos成像器8的不同采样区域相对应的完整图像的不同部分中的像素图案来确定运动。这由此由于视角而增加了采样区域的相对长度,尽管有效地降低了图像的分辨率。
37.关于这一点,图3示出了当车辆以更高的速度行驶时的情况。也就是说,当车速高于阈值时,处理器9被配置成从处理来自图2所示的第一采样区域6的像素图案图像切换到对应于图3所示的第二采样区域12的像素图案图像。在该实施方式中,速度确定基于使用第一采样区域图像确定的运动,尽管在其他实施方式中,可以使用另一速度传感器(例如gps或abs传感器)来控制切换。如图2所示的情形,从光源3发射的红外光被反射离开采样区域并向上反射回cmos成像器8。处理器9类似地执行数字图像相关以确定车辆的运动,但这次是基于对应于第二采样区域12的图像部分。这样,即使在较高速度下,传感器也可以光学地确定车辆运动。当速度回落到阈值以下时,处理器9然后可以切换回到处理来自图2所示的第一采样区域6的像素图案图像。
38.图4示出了结合有根据第三实施方式的运动传感器的车辆的平面图。与第二实施方式类似,当车速高于阈值时,处理器9切换到处理对应于第二采样区域12的像素图案图像。然而,在该实施方式中,第二采样区域12相对于cmos成像器8的位置与车辆的速度成比例。也就是说,当车辆加速时,第二采样区域的位置进一步远离cmos成像器8移动,以便增加采样区域的长度。在该实施方式中,第二采样区域12根据车辆速度从标记为12a的初始位置通过位置12b和12c分阶段转变,直到该位置到达距cmos成像器8的最大距离。这样,对于不同的速度可以优化运动传感器的精度。
39.因此,利用上述布置,提供了一种光学运动传感器,其可以精确地确定车辆在纵向和横向上以及在低速和高速下的运动。这样,运动传感器对于在自主驾驶系统中使用特别有利,尤其是与诸如gps和abs的其它传感器结合使用。例如,传感器在提供低速和屏蔽环境下的运动的精确测量方面可能特别有益。
40.应当理解,上述实施方式仅出于说明的目的而示出了应用。实际上,实施方式可以应用于许多不同的配置,详细的实施方式对于本领域技术人员来说是易于实现的。
41.例如,尽管在上述实施方式中提供了单个光电传感器和光源,但是应当理解,其它实施方式可以包括多于一个的光电传感器和光源。例如,第一光电传感器可以用于低速运动确定,而第二光电传感器可以用于高速运动确定。同样,采样区域不一定需要在车辆下方,并且可以在采样区域在车辆前方或后方的情况下提供实施方式。
42.此外,在实施方式中,可以提供用于移动成像器透镜和/或光电传感器本身以改变采样区域的位置的机构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1