平衡轴总成的齿轮组齿隙的测量设备的制作方法
1.本实用新型涉及测量测试设备领域,尤其涉及一种平衡轴总成的齿轮组齿隙的测量设备。
背景技术:
2.平衡轴总成中经常会用到齿轮传动,该过程中齿隙不满足要求的平衡轴会产生噪声,以影响汽车的nvh(噪声、振动与声振粗糙度)性能。为了控制噪声,平衡轴总成装配完成后需要对两齿轮间的齿隙进行测量,以确定实际齿隙是否在要求范围内。以四缸机平衡轴总成为例,如图1所示,四缸机平衡轴总成主要包括壳体30、第一齿轮10以及第二齿轮20。装配后,第一齿轮10和第二齿轮20可在壳体30内转动,而需要测量的即为第一齿轮10和第二齿轮20上两齿轮间的侧隙。
3.传统的齿隙测量方式主要为手工测量,如图2所示,测量时将平衡轴总成固定在工作台上,固定第二齿轮20,限制其转动,将测量工装40固定在第一齿轮10的齿轮轴上,测量工装40上有标记,该标记与第一齿轮10轴线的距离等于第一齿轮10上齿轮的分度圆半径。千分表50固定在工作台上,千分表50的测头顶在测量工装40的标记位置,且测头垂直于测量工装40的侧面,来回转动第一齿轮10,读取千分表50的变化值即为两齿轮间的齿隙。但是,传统的齿隙测量方式测量效率低,且受操作人员手工转动力大小的影响,测量误差较大,且不同操作人员测量的一致性差,只适用于样件阶段的100%检测。然而,很多主机厂在量产后一般不对齿隙进行100%检测,仅通过手工检测的方式进行抽检,无法满足量产对平衡轴齿隙100%监控的需求,使得不合格件流入市场的风险增大。故对于生产线,需要开发一种测量精度高,一致性好且测量效率高的平衡轴齿隙测量设备。
4.因此,现有技术中的平衡轴总成齿轮组齿隙测量方法存在测量误差大、测量精度低以及测量效率低的问题。
技术实现要素:
5.本实用新型的目的在于解决现有技术中的平衡轴总成齿轮组齿隙测量方法存在测量误差大、测量精度低以及测量效率低的问题。
6.为解决上述问题,本实用新型的一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,平衡轴总成包括壳体,以及设置于壳体内的第一齿轮和第二齿轮,且第一齿轮和第二齿轮可在壳体内转动。测量设备包括驱动装置以及检测装置。驱动装置包括测量平台、第一夹具部件、第二夹具部件、测量部件、第一驱动部件以及第二驱动部件。第一夹具部件设置于测量平台上,且能够相对于测量平台转动,并且第一夹具部件能够固定第一齿轮的齿轮轴;第二夹具部件固定连接在测量平台上,且能够固定第二齿轮的齿轮轴。测量部件固定连接在第一夹具部件上;第一驱动部件和第二驱动部件分别固定连接在测量平台上、且位于测量部件的两侧。
7.第一驱动部件的输出端和第二驱动部件的输出端能够分别抵接测量部件;当第一
驱动部件的输出端抵接测量部件时,能够推动测量部件朝第一方向转动,以通过第一夹具部件带动第一齿轮相对于第二齿轮朝第一方向转动;当第二驱动部件的输出端抵接测量部件时,能够推动测量部件朝第二方向转动,以通过第一夹具部件带动第一齿轮相对于第二齿轮朝第二方向转动;并且,第一方向和第二方向为相反方向。测量部件上设置有测点,检测装置用于测量测点的角位移变化量。
8.采用上述技术方案,测量平台用于固定其他部件。第一夹具部件用于夹持第一齿轮,并使第一齿轮能够相对于第二齿轮转动,以使得检测装置测量第一齿轮和第二齿轮之间的齿隙。第二夹具部件用于夹持第二齿轮,并使得第二齿轮能够处于固定状态。第一驱动部件和第二驱动部件用于分别向测量部件提供驱动力,并通过测量部件的转动使得第一夹具部件带动第一齿轮相对于第二齿轮转动。当该测量设备测量不同的平衡轴总成的齿轮组的齿隙时,由于第一驱动部件和第二驱动部件施加在测量部件上的力是一致的,故相比于手工测量,该测量设备施加在不同的平衡轴总成的齿轮组的第一齿轮上相对于第二齿轮的转动力是一致的,进而增加了第一齿轮和第二齿轮之间的齿隙值的测量精度,降低了测量误差。同时,相比于手工测量,该测量设备可以设置在生产线上,进而大大提高第一齿轮和第二齿轮之间的齿隙值的测量效率,满足量产对平衡轴总成的齿轮组齿隙100%监控的需求。因此,该平衡轴总成的齿轮组齿隙的测量设备具有测量精度高,一致性好且测量效率高的优势。
9.本实用新型的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,测量部件包括测量推杆,测量推杆固定连接在第一夹具部件上。测点设置于测量推杆上,且测量推杆上设置有抵接部。第一驱动部件和第二驱动部件分别设置为第一气缸和第二气缸,且第一气缸的输出端和第二气缸的输出端能够分别抵接抵接部。
10.采用上述技术方案,相比于其他结构,测量部件设置为测量推杆能够使得测量部件的结构更加简单。相比于其他驱动结构,第一驱动部件和第二驱动部件分别设置为第一气缸和第二气缸,能够使得第一驱动部件和第二驱动部件具有结构简单,易于安装维护,动作迅速,反应快,工作环境适应性好等优势。
11.本实用新型的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,抵接部设置为圆环,圆环通过其内孔固定连接于测量推杆上,并且,第一气缸的输出端和第二气缸的输出端能够分别抵接圆环上相对位置的外侧壁。
12.采用上述技术方案,由于第一气缸和第二气缸分别推动测量部件的过程中测量部件是发生转动的,故抵接部设置为圆环能够使得抵接部与第一气缸的输出端和第二气缸的输出端之间均为点接触,从而进一步减少该测量设备的测量误差。
13.本实用新型的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,第一夹具部件包括第一夹具座以及第一夹头,第一夹头用于夹持第一齿轮的齿轮轴。驱动装置还包括支架,支架包括固定部、延伸部和连接部,固定部与测量平台固定连接,且固定部的一端与延伸部的一端相接,延伸部的另一端朝远离测量平台的方向延伸、且与连接部相接,使得连接部与测量平台之间形成容置空间。第一夹具座转动连接于连接部上,且第一夹具座远离测量平台的一端与第一夹头固定连接;测量推杆的一端设置于容置空间内,且固定连接于第一夹具座中穿过连接部的一端上。
14.采用上述技术方案,支架的一端固定连接在测量平台上,另一端与第一夹具座转
动连接能够使得第一夹具部件设置在测量平台上,且能够相对于测量平台转动。并且,相比于其他结构,支架的设置使得第一夹具部件与测量平台之间的连接结构更加简单。支架的连接部与测量平台之间形成的容置空间能够便于测量推杆与第一夹具座之间的连接,且使得测量推杆与第一夹具部件之间的结构更加紧凑,进而减少测量推杆与第一夹具部件占用的空间。
15.本实用新型的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,连接部设置为衬套,第一夹具座设置为轴颈,测量推杆的一端固定连接于轴颈中穿过衬套的一端上。并且,沿第一齿轮的轴线方向,轴颈的尺寸大于衬套的尺寸。
16.采用上述技术方案,第一夹具座与支架的连接部通过轴颈和衬套间隙配合的方式连接使得第一夹具座与支架之间的转动连接结构更加简单。第一齿轮的轴线方向上,轴颈的尺寸大于衬套的尺寸能够使得测量推杆和第一夹具部件相对于支架能够存在一定的轴向窜动,进而便于测量推杆与第一夹具部件的转动。
17.本实用新型的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,第二夹具部件包括第二夹具座和第二夹头,第二夹头用于夹持第二齿轮的齿轮轴。第二夹具座的一端固定连接在测量平台上,另一端朝远离测量平台的方向延伸、且与第二夹头固定连接。
18.采用上述技术方案,此种设置方式使得第二夹具部件对第二齿轮的齿轮轴夹持的更加稳定,进而使得第二齿轮的齿轮轴相对于测量平台能够保持稳定。
19.本实用新型的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,检测装置包括测量支座和位移传感器,测量支座固定连接在测量平台上,位移传感器设置于测量支座上,用于测量测点的角位移变化量。
20.采用上述技术方案,测量支座用于将位移传感器固定在测量平台上。并且,相比于其他检测部件,测点的角位移变化量由位移传感器测量,能够使得测量过程更加简单。
21.本实用新型的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,测量设备还包括显示处理器,位移传感器与显示处理器通信连接,并且,显示处理器用于接收位移传感器测量的测点的角位移变化量信息,并根据测点的角位移变化量信息获得第一齿轮与第二齿轮之间的齿隙值,且可显示齿隙值。
22.采用上述技术方案,显示处理器的设置使得该测量设备能够自动根据测点的角位移变化量信息处理获得第一齿轮与第二齿轮之间的齿隙值,进而提高了该平衡轴总成的齿轮组齿隙的测量设备的自动化程度。
23.本实用新型的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,测量设备还包括工作平台,工作平台上设置有连接件,用于固定壳体。
24.采用上述技术方案,工作平台能够对该平衡轴总成起到固定支撑作用,进而便于该测量设备对平衡轴总成的齿轮组齿隙的测量。
25.本实用新型的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,测量平台上还设置有移动部,用于带动测量平台朝靠近或者远离工作平台的方向移动。
26.测量设备还包括控制模块,控制模块分别与移动部、第一驱动部件、第二驱动部件以及位移传感器通信连接。
27.采用上述技术方案,移动部的设置能够自动带动测量平台朝靠近或者远离工作平
台的方向移动,使得第一夹具部件和第二夹具部件能够分别自动夹持第一齿轮的齿轮轴和第二齿轮的齿轮轴。控制模块的设置能够使得该测量设备能够独立的自动完成齿隙测量工作。故移动部和控制模块的设置进一步提高了该平衡轴总成的齿轮组齿隙的测量设备的自动化程度。
28.本实用新型的有益效果是:
29.本实用新型提供的平衡轴总成的齿轮组齿隙的测量设备包括驱动装置以及检测装置。驱动装置包括测量平台、第一夹具部件、第二夹具部件、测量部件、第一驱动部件以及第二驱动部件。测量平台用于固定其他部件。第一夹具部件用于夹持第一齿轮,并使第一齿轮能够相对于第二齿轮转动,以使得检测装置测量第一齿轮和第二齿轮之间的齿隙。第二夹具部件用于夹持第二齿轮,并使得第二齿轮能够处于固定状态。第一驱动部件和第二驱动部件用于分别向测量部件提供驱动力,并通过测量部件的转动使得第一夹具部件带动第一齿轮相对于第二齿轮转动。当该测量设备测量不同的平衡轴总成的齿轮组的齿隙时,由于第一驱动部件和第二驱动部件施加在测量部件上的力是一致的,故相比于手工测量,该测量设备施加在不同的平衡轴总成的齿轮组的第一齿轮上相对于第二齿轮的转动力是一致的,进而增加了第一齿轮和第二齿轮之间的齿隙值的测量精度,降低了测量误差。同时,相比于手工测量,该测量设备可以设置在生产线上,进而大大提高第一齿轮和第二齿轮之间的齿隙值的测量效率,满足量产对平衡轴总成的齿轮组齿隙100%监控的需求。因此,该平衡轴总成的齿轮组齿隙的测量设备具有测量精度高,一致性好且测量效率高的优势。
30.本实用新型其他特征和相应的有益效果在说明书的后面部分进行阐述说明,且应当理解,至少部分有益效果从本实用新型说明书中的记载变的显而易见。
附图说明
31.图1为现有技术中的平衡轴总成齿轮组的结构示意图;
32.图2为现有技术中的平衡轴总成的齿轮组齿隙的测量设备的结构示意图;
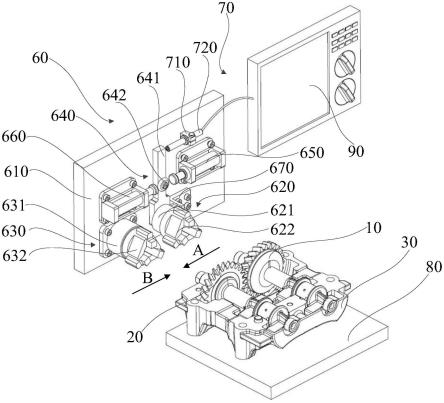
33.图3为本实用新型实施例提供的平衡轴总成的齿轮组齿隙的测量设备的结构示意图;
34.图4为本实用新型实施例提供的平衡轴总成的齿轮组齿隙的测量设备的驱动装置的局部结构示意图;
35.图5为本实用新型实施例提供的平衡轴总成的齿轮组齿隙的测量设备的第一夹具部件和测量部件的爆炸结构示意图。
36.附图标记说明:
37.10:第一齿轮;
38.20:第二齿轮;
39.30:壳体;
40.40:测量工装;
41.50:千分表;
42.60:驱动装置;
43.610:测量平台;
44.620:第一夹具部件;621:轴颈;622:第一夹头;
45.630:第二夹具部件;631:第二夹具座;632:第二夹头;
46.640:测量部件;641:测量推杆;642:圆环;
47.650:第一气缸;
48.660:第二气缸;
49.670:支架;671:固定部;672:延伸部;673:衬套;
50.70:检测装置;710:测量支座;720:位移传感器;
51.80:工作平台;
52.90:显示处理器;
53.a:第一方向;
54.b:第二方向。
具体实施方式
55.以下由特定的具体实施例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本实用新型的其他优点及功效。虽然本实用新型的描述将结合较佳实施例一起介绍,但这并不代表此实用新型的特征仅限于该实施方式。恰恰相反,结合实施方式作实用新型介绍的目的是为了覆盖基于本实用新型的权利要求而有可能延伸出的其它选择或改造。为了提供对本实用新型的深度了解,以下描述中将包含许多具体的细节。本实用新型也可以不使用这些细节实施。此外,为了避免混乱或模糊本实用新型的重点,有些具体细节将在描述中被省略。需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
56.应注意的是,在本说明书中,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
57.在本实施例的描述中,需要说明的是,术语“上”、“下”、“内”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
58.术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
59.在本实施例的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实施例中的具体含义。
60.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的实施方式作进一步地详细描述。
61.本实施例提供了一种平衡轴总成的齿轮组齿隙的测量设备,如图3所示,平衡轴总成包括壳体30,以及设置于壳体30内的第一齿轮10和第二齿轮20,且第一齿轮10和第二齿轮20可在壳体30内转动。测量设备包括驱动装置60以及检测装置70。驱动装置60包括测量
平台610、第一夹具部件620、第二夹具部件630、测量部件640、第一驱动部件以及第二驱动部件。第一夹具部件620设置于测量平台610上,且能够相对于测量平台610转动,并且第一夹具部件620能够固定第一齿轮10的齿轮轴;第二夹具部件630固定连接在测量平台610上,且能够固定第二齿轮20的齿轮轴。测量部件640固定连接在第一夹具部件620上;第一驱动部件和第二驱动部件分别固定连接在测量平台610上、且位于测量部件640的两侧。
62.第一驱动部件的输出端和第二驱动部件的输出端能够分别抵接测量部件640;当第一驱动部件的输出端抵接测量部件640时,能够推动测量部件640朝第一方向a转动,以通过第一夹具部件620带动第一齿轮10相对于第二齿轮20朝第一方向a转动;当第二驱动部件的输出端抵接测量部件640时,能够推动测量部件640朝第二方向b转动,以通过第一夹具部件620带动第一齿轮10相对于第二齿轮20朝第二方向b转动;并且,第一方向a和第二方向b为相反方向。测量部件640上设置有测点,检测装置70用于测量测点的角位移变化量。
63.具体的,该平衡轴总成的齿轮组齿隙的测量设备测量的第一齿轮10和第二齿轮20的齿隙即为第一齿轮10和第二齿轮20的侧隙,即为第一齿轮10和第二齿轮20啮合时,齿在齿槽内的能够晃动的距离,齿轮间侧隙的设置是为了便于齿轮间的运转灵活。
64.更为具体的,第二夹具部件630与测量平台610之间的连接方式可以是螺接、焊接、铆接、卡接等,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。第一夹具部件620与测量平台610之间的连接方式可在后文中描述,此处不再赘述。
65.更为具体的,测量部件640与第一夹具部件620之间的连接方式可以是螺接、焊接、铆接、卡接等,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
66.更为具体的,第一驱动部件和第二驱动部件分别与测量平台610之间的连接方式可以是螺接、焊接、铆接、卡接等。其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
67.更为具体的,测量部件640上测点与第一夹具部件620轴线的距离为第一齿轮10的分度圆半径的n倍。当该测量设备测量出测点的角位移变化量后,用角位移对应的弧长位移除以n即为平衡轴总成的齿轮组的齿隙。并且,n的取值可以为1、2、3、4等正整数,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
68.更为具体的,检测装置70设置为位移传感器720、摄像头或者其他装置,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
69.更为具体的,该测量设备可以由生产线上的总的控制装置控制其动作,也可以设置单独的控制模块,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
70.需要说明的是,测量平台610用于固定其他部件。第一夹具部件620用于夹持第一齿轮10,并使第一齿轮10能够相对于第二齿轮20转动,以使得检测装置70测量第一齿轮10和第二齿轮20之间的齿隙。第二夹具部件630用于夹持第二齿轮20,并使得第二齿轮20能够处于固定状态。第一驱动部件和第二驱动部件用于分别向测量部件640提供驱动力,并通过测量部件640的转动使得第一夹具部件620带动第一齿轮10相对于第二齿轮20转动。当该测量设备测量不同的平衡轴总成的齿轮组的齿隙时,由于第一驱动部件和第二驱动部件施加在测量部件640上的力是一致的,故相比于手工测量,该测量设备施加在不同的平衡轴总成的齿轮组的第一齿轮10上相对于第二齿轮20的转动力是一致的,进而增加了第一齿轮10和
第二齿轮20之间的齿隙值的测量精度,降低了测量误差。同时,相比于手工测量,该测量设备可以设置在生产线上,进而大大提高第一齿轮10和第二齿轮20之间的齿隙值的测量效率,满足量产对平衡轴总成的齿轮组齿隙100%监控的需求。因此,该平衡轴总成的齿轮组齿隙的测量设备具有测量精度高,一致性好且测量效率高的优势。
71.本实施例的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,如图4所示,测量部件640包括测量推杆641,测量推杆641固定连接在第一夹具部件620上。测点设置于测量推杆641上,且测量推杆641上设置有抵接部。第一驱动部件和第二驱动部件分别设置为第一气缸650和第二气缸660,且第一气缸650的输出端和第二气缸660的输出端能够分别抵接抵接部。
72.具体的,测量推杆641的形状可以设置为条状、棒状或者其他形状,并且测量推杆641需要具有一定的长度,以便于设置测点。
73.更为具体的,测点可以为设置在测量推杆641上相应位置处的标记点,刻度点等,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
74.更为具体的,测量推杆641可以通过螺接、焊接、卡接、铆接等方式固定连接在第一夹具部件620上,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
75.更为具体的,抵接部可以为测量推杆641上凸出的结构,也可以为设置于测量推杆641上的独立的结构,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
76.更为具体的,第一气缸650的输出端和第二气缸660的输出端均采用t型头结构,以便于第一气缸650的输出端和第二气缸660的输出端与抵接部的接触。
77.需要说明的是,相比于其他结构,测量部件640设置为测量推杆641能够使得测量部件640的结构更加简单。相比于其他驱动结构,第一驱动部件和第二驱动部件分别设置为第一气缸650和第二气缸660,能够使得第一驱动部件和第二驱动部件具有结构简单,易于安装维护,动作迅速,反应快,工作环境适应性好等优势。并且,由于第一齿轮10相对于第二齿轮20旋转所需的转动力不大,故第一气缸650和第二气缸660施加在测量推杆641上的扭矩应小于1n*m,例如可以是0.2n*m、0.5n*m、0.85n*m等,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
78.本实施例的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,如图4所示,抵接部设置为圆环642,圆环642通过其内孔固定连接于测量推杆641上,并且,第一气缸650的输出端和第二气缸660的输出端能够分别抵接圆环642上相对位置的外侧壁。
79.具体的,圆环642与测量推杆641之间可以通过螺接、卡接、焊接等方式连接。优选地,为便于圆环642与测量推杆641之间的安装,以及保证圆环642与测量推杆641之间连接的稳固性,本实施例中的圆环642与测量推杆641之间通过螺接的方式连接。
80.需要说明的是,由于第一气缸650和第二气缸660分别推动测量部件640的过程中测量部件640是发生转动的,故抵接部设置为圆环642能够使得抵接部与第一气缸650的输出端和第二气缸660的输出端之间均为点接触,从而进一步减少该测量设备的测量误差。
81.本实施例的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,如图3和图5所示,第一夹具部件620包括第一夹具座以及第一夹头622,第一夹头622用于夹持第一齿轮10的齿轮轴。驱动装置60还包括支架670,支架670包括固定部671、延伸部672和连
接部,固定部671与测量平台610固定连接,且固定部671的一端与延伸部672的一端相接,延伸部672的另一端朝远离测量平台610的方向延伸、且与连接部相接,使得连接部与测量平台610之间形成容置空间。第一夹具座转动连接于连接部上,且第一夹具座远离测量平台610的一端与第一夹头622固定连接;测量推杆641的一端设置于容置空间内,且固定连接于第一夹具座中穿过连接部的一端上。
82.具体的,第一夹头622的卡爪之间可以设置弹性件,以保证第一夹头622的卡爪能够夹住第一齿轮10的齿轮轴,第一夹头622的卡爪上也可以设置驱动件,以通过驱动第一夹头622的卡爪使其夹住第一齿轮10的齿轮轴。由于第一齿轮10相对于第二齿轮20旋转所需的转动力不大,故为使得第一夹头622的结构更加简单,本实施例中的第一夹头622的卡爪之间优选设置弹性件以保证第一夹头622的卡爪能够夹住第一齿轮10的齿轮轴。
83.更为具体的,第一夹具部件620采用浮动机构,以保证第一夹具部件620夹紧第一齿轮10的齿轮轴后,第一夹具部件620的轴线与第一齿轮10的齿轮轴的轴线位于同一条直线。
84.更为具体的,固定部671与测量平台610之间可以通过螺接、卡接、焊接等方式连接。优选地,为便于固定部671与测量平台610之间的安装,以及保证固定部671与测量平台610之间连接的稳固性,本实施例中的固定部671与测量平台610之间通过螺接的方式连接。
85.更为具体的,固定部671与延伸部672,以及延伸部672与连接部之间可以通过焊接、螺接等方式连接,也可以一体成型。优选地,为便于支架670的加工制造,本实施例中的支架670一体成型。
86.更为具体的,第一夹具座与连接部的转动连接方式可以为销轴结构、球铰结构或者其他结构等。优选地,为使得第一夹具座与连接部之间的连接结构更加简单,本实施例中的第一夹具座与连接部之间选用销轴结构转动连接。
87.更为具体的,第一夹具座与第一夹头622之间可以通过焊接、螺接等方式连接,也可以一体成型,其具体根据实际设计和使用需求设定,本实施例对此不做具体限定。
88.更为具体的,测量推杆641与第一夹具座之间可以通过螺接、卡接、焊接等方式连接。优选地,为便于测量推杆641与第一夹具座之间的安装,以及保证测量推杆641与第一夹具座之间连接的稳固性,本实施例中的测量推杆641与第一夹具座之间通过螺接的方式连接。
89.需要说明的是,支架670的一端固定连接在测量平台610上,另一端与第一夹具座转动连接能够使得第一夹具部件620设置在测量平台610上,且能够相对于测量平台610转动。并且,相比于其他结构,支架670的设置使得第一夹具部件620与测量平台610之间的连接结构更加简单。支架670的连接部与测量平台610之间形成的容置空间能够便于测量推杆641与第一夹具座之间的连接,且使得测量推杆641与第一夹具部件620之间的结构更加紧凑,进而减少测量推杆641与第一夹具部件620占用的空间。
90.本实施例的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,如图4和图5所示,连接部设置为衬套673,第一夹具座设置为轴颈621,测量推杆641的一端固定连接于轴颈621中穿过衬套673的一端上。并且,沿第一齿轮10的轴线方向,轴颈621的尺寸大于衬套673的尺寸。
91.具体的,测量推杆641与轴颈621之间可以通过螺接、卡接、焊接等方式连接。优选
地,为便于测量推杆641与轴颈621之间的安装,以及保证测量推杆641与轴颈621之间连接的稳固性,本实施例中的测量推杆641与轴颈621之间通过螺接的方式连接。
92.需要说明的是,第一夹具座与支架670的连接部通过轴颈621和衬套673间隙配合的方式连接使得第一夹具座与支架670之间的转动连接结构更加简单。第一齿轮10的轴线方向上,轴颈621的尺寸大于衬套673的尺寸能够使得测量推杆641和第一夹具部件620相对于支架670能够存在一定的轴向窜动,进而便于测量推杆641与第一夹具部件620的转动。
93.具体的,沿第一齿轮10的轴线方向,轴颈621的尺寸大于衬套673的尺寸范围设置在0.05mm-0.09mm之间,使得测量推杆641和第一夹具部件620相对于支架670能够存在0.05mm-0.09mm的轴向窜动,例如可以是0.05mm、0.065mm、0.08mm、0.09mm等,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
94.更为具体的,轴颈621和衬套673间隙配合的径向尺寸设置在0.015mm-0.035mm之间,例如可以是0.015mm、0.021mm、0.03335mm、0.035mm等,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。并且,设备保养时轴颈621和衬套673间需要涂油,以减小第一夹具部件620相对于支架670的转动阻力,从而进一步提高该测量设备的测量精度。
95.本实施例的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,如图3所示,第二夹具部件630包括第二夹具座631和第二夹头632,第二夹头632用于夹持第二齿轮20的齿轮轴。第二夹具座631的一端固定连接在测量平台610上,另一端朝远离测量平台610的方向延伸、且与第二夹头632固定连接。
96.具体的,第二夹头632的卡爪之间可以设置弹性件,以保证第二夹头632的卡爪能够夹住第二齿轮20的齿轮轴,第二夹头632的卡爪上也可以设置驱动件,以通过驱动第二夹头632的卡爪使其夹住第二齿轮20的齿轮轴。由于第一齿轮10相对于第二齿轮20旋转所需的转动力不大,故为使得第二夹头632的结构更加简单,本实施例中的第二夹头632的卡爪之间优选设置弹性件以保证第二夹头632的卡爪能够夹住第二齿轮20的齿轮轴。
97.更为具体的,第二夹具部件630采用浮动机构,以保证第二夹具部件630夹紧第二齿轮20的齿轮轴后,第二夹具部件630的轴线与第二齿轮20的齿轮轴的轴线位于同一条直线。
98.更为具体的,第二夹具座631与测量平台610之间可以通过螺接、卡接、焊接等方式连接。优选地,为便于第二夹具座631与测量平台610之间的安装,以及保证第二夹具座631与测量平台610之间连接的稳固性,本实施例中的第二夹具座631与测量平台610之间通过螺接的方式连接。
99.更为具体的,第二夹具座631与第二夹头632之间可以通过焊接、螺接等方式连接,也可以一体成型,其具体根据实际设计和使用需求设定,本实施例对此不做具体限定。
100.需要说明的是,此种设置方式使得第二夹具部件630对第二齿轮20的齿轮轴夹持的更加稳定,进而使得第二齿轮20的齿轮轴相对于测量平台610能够保持稳定。
101.本实施例的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,如图3所示,检测装置70包括测量支座710和位移传感器720,测量支座710固定连接在测量平台610上,位移传感器720设置于测量支座710上,用于测量测点的角位移变化量。
102.具体的,测量支座710与测量平台610之间可以通过螺接、卡接、焊接等方式连接,
其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
103.更为具体的,位移传感器720与测量支座710之间可以通过卡接、螺接等方式连接,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
104.需要说明的是,测量支座710用于将位移传感器720固定在测量平台610上。并且,相比于其他检测部件,测点的角位移变化量由位移传感器720测量,能够使得测量过程更加简单。
105.本实施例的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,如图3所示,测量设备还包括显示处理器90,位移传感器720与显示处理器90通信连接,并且,显示处理器90用于接收位移传感器720测量的测点的角位移变化量信息,并根据测点的角位移变化量信息获得第一齿轮10与第二齿轮20之间的齿隙值,且可显示齿隙值。
106.具体的,位移传感器720与显示处理器90之间可以有线连接,也可以无线连接,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
107.更为具体的,显示处理器90接收到位移传感器720测量的测点的角位移变化量信息后的处理过程为用角位移对应的弧长位移除以n即得到平衡轴总成的齿轮组的齿隙值。
108.需要说明的是,显示处理器90的设置使得该测量设备能够自动根据测点的角位移变化量信息处理获得第一齿轮10与第二齿轮20之间的齿隙值,进而提高了该平衡轴总成的齿轮组齿隙的测量设备的自动化程度。
109.本实施例的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,如图3所示,测量设备还包括工作平台80,工作平台80上设置有连接件,用于固定壳体30。
110.具体的,工作平台80与壳体30之间可以通过卡接、螺接等可拆卸连接方式连接。并且连接件可以设置为卡扣、螺纹孔等结构。其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
111.需要说明的是,工作平台80能够对该平衡轴总成起到固定支撑作用,进而便于该测量设备对平衡轴总成的齿轮组齿隙的测量。
112.本实施例的另一种实施方式提供了一种平衡轴总成的齿轮组齿隙的测量设备,测量平台610上还设置有移动部(图中未示出),用于带动测量平台610朝靠近或者远离工作平台80的方向移动。
113.测量设备还包括控制模块(图中未示出),控制模块分别与移动部、第一驱动部件、第二驱动部件以及位移传感器720通信连接。
114.具体的,移动部可以设置为气缸、电动推杆、液压缸或者其他结构,其具体可以根据实际设计和使用需求设定,本实施例对此不做具体限定。
115.需要说明的是,移动部的设置能够自动带动测量平台610朝靠近或者远离工作平台80的方向移动,使得第一夹具部件620和第二夹具部件630能够分别自动夹持第一齿轮10的齿轮轴和第二齿轮20的齿轮轴。控制模块的设置能够使得该测量设备能够独立的自动完成齿隙测量工作。故移动部和控制模块的设置进一步提高了该平衡轴总成的齿轮组齿隙的测量设备的自动化程度。
116.该平衡轴总成的齿轮组齿隙的测量设备的工作过程为:将平衡轴总成的壳体30固定在工作平台80上,然后推动测量平台610朝靠近工作平台80的方向移动,直至使得第一夹具部件620的第一夹头622夹紧第一齿轮10的齿轮轴,第二夹具部件630的第二夹头632夹紧
第二齿轮20的齿轮轴。然后第二气缸660先动作,使其输出端接触到测量推杆641上的圆环642,并继续向第二方向b移动以推动测量推杆641转动,直至测量推杆641无法转动,然后由位移传感器720测量测点的角位移变化量,并传输至显示处理器90中经过角位移对应的弧长位移除以n的处理得到平衡轴总成的齿轮组的齿隙值,并显示在显示处理器90的显示屏上。之后第二气缸660收回,第一气缸650动作,使其输出端接触到测量推杆641上的圆环642,并继续向第一方向a移动以推动测量推杆641转动,直至测量推杆641无法转动,以使得测量推杆641回到初始位置。
117.该平衡轴总成的齿轮组齿隙的测量设备在工作过程中是直接自动测量并记录齿轮组的齿隙值的,故具有自动化程度高的优势。并且,测量过程中,该测量设备的测量节拍不到10s,测量一致性误差在
±
0.002mm,手工测量的测量节拍最少需要30s,测量一致性误差在
±
0.01mm,故该测量设备的测量效率和测量一致性大大优于手工测量。另外,由于只需根据齿轮参数调整第一夹具部件620和第二夹具部件630的中心距以及位移传感器720在测量推杆641上测点的位置即可实现不同产品的在线测量,故该测量设备还具有适用程度高的优势。
118.虽然通过参照本实用新型的某些优选实施方式,已经对本实用新型进行了图示和描述,但本领域的普通技术人员应该明白,以上内容是结合具体的实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。本领域技术人员可以在形式上和细节上对其作各种改变,包括做出若干简单推演或替换,而不偏离本实用新型的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1