一种自动扶梯梳齿啮合度检测装置的制作方法
1.本实用新型属于梳齿啮合度检测技术领域,具体是指一种自动扶梯梳齿啮合度检测装置。
背景技术:
2.我国自动扶梯的保有量高、增长速度大,为人们的出行,提供越来越多的便利,普遍安装于高铁地铁、机场、商场、车站等公共场所。然而,根据近年来的相关报道,每年都有自动扶梯相关的安全事故出行,大部分出现在人流密集的地铁扶梯和商场扶梯中。其中绝大部分的扶梯安全事故是由机械间隙引起的,如梳齿与踏板面间隙、梳齿与踏板齿槽啮合深度等。在传统的检测方法中,没有可直接测量梳齿与踏板齿槽啮合深度的工具或专用仪器,而且传统手段测量梳齿与踏板面间隙的操作,多采用斜塞尺与钢直尺组合测量方法,存在人为误差、操作不方便、不能直接测量、不能自动的数据化测量等弊端。
技术实现要素:
3.为了解决上述难题,本实用新型提供了一种实现自动化的数据化测量,提供高效精确的测量的自动扶梯梳齿啮合度检测装置。
4.为了实现上述功能,本实用新型采取的技术方案如下:一种自动扶梯梳齿啮合度检测装置,包括平板主机和梳齿啮合度测量模块,所述平板主机和梳齿啮合度测量模块通过无线通信方式连接;所述梳齿啮合度测量模块包括测控电路板、位移传感器、楔形测量板、移动把手和基座壳体,所述测控电路板和位移传感器设于基座壳体内,所述位移传感器与测控电路板电相连,所述楔形测量板设于基座壳体外侧壁上,所述移动把手设于基座壳体外侧壁上,所述移动把手与楔形测量板相连,当测量人员推动移动把手时,楔形测量板随着移动把手的运动伸缩移动,所述位移传感器的测量探头顶靠设于移动把手的移动方向上,移动把手伸缩过程,一直受位移传感器实时监测,位移传感器所测数据通过有线传输的方式,实时发送至测控电路板上,测控电路板通过其无线传输模块,实时传输数据至平板主机。
5.进一步地,所述楔形测量板的尖端夹角为α。
6.进一步地,所述楔形测量板底壁距离基座壳体底壁差值为h。
7.进一步地,所述楔形测量板底壁距离基座壳体底壁差值小于踏面齿槽深度数值,确保楔形测量板能够放进齿槽内。
8.进一步地,所述楔形测量板带有尖端夹角α的直角边的高度大于梳齿与踏面的间隙高度。
9.梳齿与踏面的间隙测量:首先,测量人员将梳齿啮合度测量模块的楔形测量板的底壁顶靠在踏板上壁面上,楔形测量板的带有尖端夹角的前端贴合设于在踏面上的梳齿前端上,然后人为通过移动把手,推动楔形测量板带有尖端夹角的前端伸入到梳齿板的梳齿与踏面的间隙h1中,直至楔形测量板抵在梳齿壁上停止,此时位移传感器记录楔形测量板
的伸长位移量l1,楔形测量板抵在梳齿壁上停止后的高度为h1。
10.梳齿与踏面齿槽的啮合深度测量:首先,测量人员将梳齿啮合度测量模块的楔形测量板放入踏板齿槽内,楔形测量板底壁悬置于踏板齿槽下方,基座壳体的底壁顶靠在踏板上壁面上,楔形测量板的带有尖端夹角的前端顶靠在齿槽内的梳齿前端,然后人为通过移动把手,推动楔形测量板带有尖端夹角的前端伸入到齿槽内梳齿的下端,此时位移传感器记录楔形测量板的伸长位移量l2,通过计算可以得出梳齿板的梳齿与踏面齿槽的啮合深度h2。
11.梳齿啮合度测量模块的测控电路板将采集的数据,通过测控电路板上的无线通信模块,实时传输至平板主机,平板主机通过设定的逻辑处理方式,得出测量结果:
12.1)楔形测量板的伸长位移量l1与梳齿与踏面的间隙h1,以及楔形测量板尖端夹角α的几何关系为tanα=h1÷
l1,则得出梳齿与踏面的间隙: h1=l1×
tanα。
13.2)梳齿与踏面齿槽的啮合深度h2、楔形测量板安装初始底面离基座壳体底面差值为h、楔形测量板尖端夹角为α的几何关系为:h2+l2
×
tanα=h ,则得出梳齿与踏面齿槽的啮合深度为:h2=h-l2
×
tanα。
14.本实用新型采取上述结构取得有益效果如下:本实用新型提供的一种自动扶梯梳齿啮合度检测装置操作简单,机构紧凑,设计合理,楔形测量板的尖端夹角为α,楔形测量板底壁距离基座壳体底壁差值为h,便于测量计算出梳齿与踏面的间隙以及梳齿与踏面齿槽的啮合深度,实现自动化的数据化测量,提供高效精确的测量;梳齿啮合度测量模块的测控电路板将采集的数据,通过测控电路板上的无线通信模块,实时传输至平板主机,平板主机通过设定的逻辑处理方式,得出测量结果。
附图说明
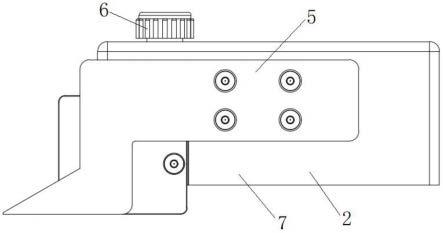
15.图1为本实用新型一种自动扶梯梳齿啮合度检测装置的主视图;
16.图2为本实用新型一种自动扶梯梳齿啮合度检测装置的电路模块连接图;
17.图3为本实用新型一种自动扶梯梳齿啮合度检测装置的扶梯梳齿与踏板主视图;
18.图4为本实用新型一种自动扶梯梳齿啮合度检测装置的扶梯梳齿与踏板右视图。
19.其中,1、平板主机,2、梳齿啮合度测量模块,3、测控电路板,4、位移传感器,5、楔形测量板,6、移动把手,7、基座壳体。
具体实施方式
20.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。以下结合附
图,对本实用新型做进一步详细说明。
22.如图1-4所示,本实用新型一种自动扶梯梳齿啮合度检测装置,包括平板主机1和梳齿啮合度测量模块2,所述平板主机1和梳齿啮合度测量模块2通过无线通信方式连接;所述梳齿啮合度测量模块2包括测控电路板3、位移传感器4、楔形测量板5、移动把手6和基座壳体7,所述测控电路板3和位移传感器4设于基座壳体7内,所述位移传感器4与测控电路板3电相连,所述楔形测量板5设于基座壳体7外侧壁上,所述移动把手6设于基座壳体7外侧壁上,所述移动把手6与楔形测量板5相连,所述位移传感器4的测量探头顶靠设于移动把手6的移动方向上。
23.所述楔形测量板5的尖端夹角为α。
24.所述楔形测量板5底壁距离基座壳体7底壁差值为h。
25.所述楔形测量板5底壁距离基座壳体7底壁差值小于踏面齿槽深度数值。
26.所述楔形测量板5带有尖端夹角α的直角边的高度大于梳齿与踏面的间隙高度。
27.具体使用时,梳齿与踏面的间隙测量:首先,测量人员将梳齿啮合度测量模块2的楔形测量板5的底壁顶靠在踏板上壁面上,楔形测量板5的带有尖端夹角的前端贴合设于在踏面上的梳齿前端上,然后人为通过移动把手6,推动楔形测量板5带有尖端夹角的前端伸入到梳齿板的梳齿与踏面的间隙h1中,直至楔形测量板5抵在梳齿壁上停止,此时位移传感器4记录楔形测量板5的伸长位移量l1,楔形测量板5抵在梳齿壁上停止后的高度为h1。
28.梳齿与踏面齿槽的啮合深度测量:首先,测量人员将梳齿啮合度测量模块 2的楔形测量板5放入踏板齿槽内,楔形测量板5底壁悬置于踏板齿槽下方,基座壳体7的底壁顶靠在踏板上壁面上,楔形测量板5的带有尖端夹角的前端顶靠在齿槽内的梳齿前端,然后人为通过移动把手6,推动楔形测量板5带有尖端夹角的前端伸入到齿槽内梳齿的下端,此时位移传感器4记录楔形测量板 5的伸长位移量l2,通过计算可以得出梳齿板的梳齿与踏面齿槽的啮合深度 h2。
29.梳齿啮合度测量模块2的测控电路板3将采集的数据,通过测控电路板3 上的无线通信模块,实时传输至平板主机1,平板主机1通过设定的逻辑处理方式,得出测量结果:
30.1)楔形测量板的伸长位移量l1与梳齿与踏面的间隙h1,以及楔形测量板尖端夹角α的几何关系为tanα=h1÷
l1,则得出梳齿与踏面的间隙: h1=l1×
tanα。
31.2)梳齿与踏面齿槽的啮合深度h2、楔形测量板安装初始底面离基座壳体底面差值为h、楔形测量板尖端夹角为α的几何关系为:h2+l2
×
tanα=h ,则得出梳齿与踏面齿槽的啮合深度为:h2=h-l2
×
tanα。
32.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1