一种用于洁净室建成之后的FFU装置的检漏系统的制作方法
一种用于洁净室建成之后的ffu装置的检漏系统
技术领域
1.本实用新型涉及半导体技术领域,具体涉及一种用于洁净室建成之后的 ffu装置的检漏方法。
背景技术:
2.现有技术中,半导体集成电路(ic)产业经历了指数式增长,ic材料和设计方面的技术进步产生了多代ic,其中,每一代都具有比上一个代更小和更复杂的电路。在ic发展过程中,功能密度大幅增加了而几何尺寸减小。通常这种按比例缩小工艺通过提高生产效率和降低相关成本来提供很多益处。这种按比例缩小增加了加工和生产ic的复杂度,也对生产环境(洁净室) 提出了越来越高的要求。
3.洁净室是指对空气洁净度、温度、湿度、压力、噪声等参数根据需要进行控制的密闭性较好的空间。国内曾统计过,在无洁净级别要求的环境下生产mos电路管芯的合格率仅10%~15%,64位储存器仅2%。因此,目前在精密机械、半导体、宇航、原子能等工业中应用洁净室已经是基础配备了。
4.现有技术中的洁净室包括洁净空间、天花板以及高架地板,天花板上设有复数个送风区,每个送风区包括至少一个送风机构,送风机构通常为ffu 装置,ffu装置的作用是送风和过滤较大颗粒污染物。在实际建造过程中,传统的洁净室在建厂完成后,必须对天花板上的ffu装置进行高效过滤器检漏(hepa filter leakage test),以保证全部的ffu装置都是完好无损的,防止因高效过滤器损坏而造成泄漏的情况。
5.针对上述高效过滤器检漏(hepa filter leakage test)的要求,现有的做法都是人工进行检测,即采用微尘粒子计数器(particle counter)及探头,在hepa全表面进行扫描。
6.然而,这种方法存在如下问题:(1)由于现有的洁净室面积一般都很大,期内安装的高效过滤器的数量都是成千上万个,因此人工检测的速度跟不上,效率太低;(2)由于现有的洁净室的高度越来越高,普遍的都在4~6m 左右,10米以上的也比比皆是,因此,工人在检测时,都需要依靠升降梯,一来存在安全隐患,二来升降梯也影响了检测作业,导致测试精确度降低; (3)在工人采用探头检测时,探头移动过快,或者扫描路径没有部份重叠,这都可能发生遗漏洩漏点,即漏测,这些都给检测结果带来致命影响;(4)人工检测会受到人为主观影响,测试结果也跟着受人为影响。
7.因此,开发一种用于洁净室建成之后、位于天花板上的ffu装置的检漏系统,以快速、准确的完成高效过滤器的检漏测试,显然具有积极的现实意义。
技术实现要素:
8.本实用新型的目的是提供一种用于洁净室建成之后的ffu装置的检漏方法。
9.为达到上述目的,本实用新型采用的技术方案是:一种用于洁净室建成之后的ffu装置的检漏系统,所述ffu装置位于洁净室的天花板上;
10.包括检测机构、定位系统、数据传输系统和控制系统;
11.所述检测机构包括至少一组检测设备,该检测机构用于高效过滤器的检漏测试;每一组所述检测机构包括上载具、检测光源、下载具和接收器;所述上载具用于搭载所述检测光源,并具有x、y、z三维的运动自由度;所述检测光源呈环形,其具有至少一组彩色灯珠,每一组彩色灯珠由红灯珠、橙灯珠、黄灯珠、绿灯珠、蓝灯珠、青灯珠、紫灯珠依次顺序构成;所述检测光源发出的光呈圆台形;所述下载具用于搭载所述接收器,并具有x、y、z 三维的运动自由度;每一组所述检测设备的检测光源和接收器上下一一对应设置,所述接收器用于接收所述检测光源的光信号;
12.所述定位系统用于所述上载具和下载具的定位;所述检测机构通过所述控制系统控制、在定位系统的定位下对高效过滤器进行检漏测试。
13.上文中,所述检测设备可以是一组,也可以是多组同时进行。检测作业可以通过控制系统来统一控制。所述定位系统是用来定位检测设备的,从而控制其按照设定的路线进行移动和检测。所述数据传输系统是用来将检测数据传输至指定的系统或设备上,以便对这些数据进行下一步的研究判断。
14.所述上载具和下载具是配套设置的,上载具用来搭载检测光源,而下载具用来搭载接收器。同时,检测光源和接收器也是配套设置的,检测光源用来发射光线,而接收器用来接收光信号。
15.优选地,还包括数据分析系统,所述数据分析系统用于分析由所述数据传输系统传输过来的数据。
16.优选地,所述数据分析系统为ai智能数据分析系统。
17.优选地,所述检测机构还包括至少一组第二检测设备,所述第二检测设备用于高效过滤器和天花龙骨之间的检漏测试;
18.每一组第二检测设备包括第二上载具、第二检测光源、第二下载具和第二接收器;所述第二检测光源呈矩形,其由复数个led点状光源构成。所述第二检测光源呈矩形,可以是长方形,也可以是正方形,只要与hepa匹配即可。
19.优选地,所述第二上载具为无人机,所述第二下载具为无人机。
20.优选地,所述上载具为无人机,所述下载具为无人机。
21.优选地,所述接收器为cmos image sensor。
22.优选地,所述检测光源呈环形,其具有至少2组彩色灯珠,每一组彩色灯珠由红灯珠、橙灯珠、黄灯珠、绿灯珠、蓝灯珠、青灯珠、紫灯珠依次顺序构成。
23.优选地,所述检测光源上的彩色灯珠向下向外倾斜,使得所述检测光源发出的光呈圆台形。
24.采用上述检漏系统进行检漏,可以包括如下步骤:
25.(1)采用至少一组检测设备,配合定位系统和数据传输系统对所述ffu 装置内的高效过滤器进行检漏测试;将检测数据收集起来;
26.检测时,所述检测光源处于旋转状态;
27.(2)将上述步骤(1)得到的检测数据进行分析,若是某处具有不同颜色的光点情况,需要进行判断:
28.(a)若泄漏的光点颜色中具有长波长的光点颜色时,则判定该处有泄漏;
29.(b)若泄漏的光点颜色中均为短波长的光点颜色时,则采用单一颜色的长波长光源,按照上述步骤(1)的方式进行复测,若是出现该长波长光源,则判定为有泄漏,否则,则进行人工复查;
30.所述短波长的光点颜色为蓝、青、紫色;所述长波长的光点颜色为红、橙、黄、绿色。
31.上文中,所述步骤(2)的(a)和(b)中,泄漏的光点颜色绝大部分情况下是合成光,因为当有长波长的光点颜色时,其实短波长的光也肯定会跟着泄漏出来,所以,当检测泄漏的光点颜色时,需要对泄漏光进行分解,当分解出的光中,存在长波长的光点颜色(如红、橙、黄、绿色),则判定为泄漏,而若是分解出的光中只存在短波长的光点颜色(如蓝、青、紫色),则需要复测。
32.上文中,所述检测设备可以是一组,也可以是多组同时进行。检测作业可以通过控制系统来统一控制。所述定位系统是用来定位检测设备的,从而控制其按照设定的路线进行移动和检测。所述数据传输系统是用来将检测数据传输至指定的系统或设备上,以便对这些数据进行下一步的研究判断。
33.所述上载具和下载具是配套设置的,上载具用来搭载检测光源,而下载具用来搭载接收器。同时,检测光源和接收器也是配套设置的,检测光源用来发射光线,而接收器用来接收光信号。所述检测光源呈环形,其具有至少一组彩色灯珠,每一组彩色灯珠由红灯珠、橙灯珠、黄灯珠、绿灯珠、蓝灯珠、青灯珠、紫灯珠依次顺序构成,一组彩色灯珠在检测时处于旋转状态,在旋转状态下,可以将这些彩色灯珠混光,成为白光。所述检测光源发出的光呈圆台形,即灯珠是斜向下方设置的,其与纵轴线之间的夹角为倾斜角θ。
34.本实用新型开创性的采用了七色彩光进行探测,把高效过滤器上的漏孔看成筛孔,当筛孔较小时,长波长过不去,只有短波长过得去;因此,当若泄漏的光点颜色中具有长波长的光点颜色时(或者干脆是合成的白光),则表示这个孔已经较大了,需要判定该处有泄漏,必须进行人工复查(基本上是必漏无疑的);反之,若泄漏的光点颜色中均为短波长的光点颜色时,则可能孔洞很小,也可能是滤材纤维间的缝隙,故需人工复查,人为再确认。
35.优选地,所述步骤(1)中,所述检测设备至少有2组,一组用于高效过滤器进行检漏测试;另一组用于高效过滤器和天花龙骨之间的检漏测试;
36.优选地,所述步骤(1)中,所述定位系统基于bim软件系统,用于检测设备的上载具和下载具的寻址定位。所述bim软件系统是现有技术,bim 提供的是三维地图,做为导航用,本实用新型依于建筑三维模型,提供定位系统做为上下载具移动的参考标的与量测数据的寻址。
37.优选地,所述步骤(1)中,需要先对ffu装置和检测光源之间的距离 h进行校正,以避免ffu装置内的风机及其扇叶产生的遮蔽影响,具体如下:
38.所述检测光源呈圆环形,其直径为d,其上的彩色灯珠的倾斜角为θ;所述ffu装置的喇叭口入口直径为d,所述ffu装置的扇叶顶部与喇叭口边缘之间的距离为h;则:h=(d-d)/2tanθ-h。
39.由于ffu装置的型号较多,各自的规格也差异较大,因此除了采用上述方式进行校正之外,优选采用人工校正:先将上载具设置在ffu风扇上方,不装hepa,用检测光源照射,而在ffu风扇下方设置接收器,从而确定上载具和ffu之间的距离(该步骤可以不在洁净室现场,也可以在ffu工厂)。
40.优选地,所述步骤(1)中,所述检测设备根据所述定位系统对天花板上的ffu装置依序进行检测。
41.优选地,所述步骤(1)中,检测时,所述检测光源处于旋转状态;其旋转速度为100~600圈/min。优选为150~500圈/min,更优选为250~400圈 /min,更优选为300~350圈/min。
42.优选地,在所述步骤(1)之前,对洁净室进行全域清洁;然后开启所述ffu装置,检测其是否正常运行:若ffu装置正常运行,则进入步骤(1);否则需要对ffu装置进行检修或更换。
43.优选地,所述步骤(1)在夜间进行。更优选地,在无光无人的环境下进行。
44.本实用新型的机理如下:检测光源为环形并以倾斜角方式(圆台形)射向ffu吸入口,并照射到叶轮的叶片,闪过叶轮的电机头,形成反射射入 ffu的空气箱室,再由空气箱室形成反射形成光场;采用不同颜色光源混光,以借用不用光波长进行过滤器孔洞筛选。
45.由于上述技术方案运用,本实用新型与现有技术相比具有下列优点:
46.1.本实用新型开发了一种新的用于洁净室建成之后的ffu装置的检漏系统,通过检测机构、配合定位系统和数据传输系统实现了自动化检漏测试作业,解决了现有技术中人工检测效率低和精度低的问题;解决了业内长期以来的亟需解决却始终没有解决的技术难题,具有显著的进步和积极的现实意义;
47.2.由于本实用新型是采用光源检测的方式,但由于ffu装置内的风机及其扇叶会对位于下方的高效过滤器产生遮蔽,因此,针对这一新的技术问题,本实用新型将检测光源设计为环形,并由红灯珠、橙灯珠、黄灯珠、绿灯珠、蓝灯珠、青灯珠、紫灯珠依次顺序构成,并在检测时使得所述检测光源处于旋转状态,从而当光照射到高效过滤器上的破洞时,光发生衍射,从而在下发的接收器得到不同颜色的光点;从而完美的解决了上述新的技术问题,并且提高了检测精度;
48.3.现有技术中,即使人工完成了高效过滤器的检漏测试,但在实际生产过程中还是存在泄漏问题,针对这一特殊的问题,实用新型人经过多年的工作经验,发现:除了高效过滤器本身的检漏,还有一个被忽视的泄漏点:那就是高效过滤器与其装配的龙骨之间的缝隙;而针对这一新的技术问题,若是采用之前的人工检测,即使对缝隙进行检测,也难以进行:因为一旦发现出现缝隙,则后续需要进行重新安装,而安装之后再次人工检测时,往往都是几天之后的事请了,这便导致了前后无法衔接;而本实用新型采用另一组检测设备(即第二检测设备),通过呈矩形的检测光源,以及上载具(无人机)的上下高度调整,可以很快的当场检测,即使重新安装ffu,也可以很快的进行第二次检测,从而可以高效的完成检测作业。
附图说明
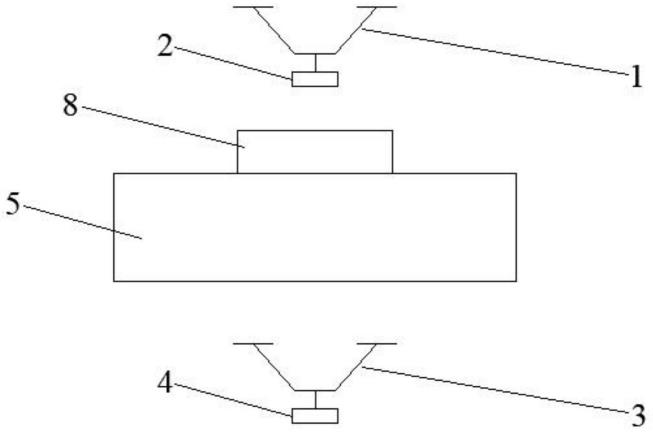
49.图1是本实用新型实施例一中第一组检测设备的结构示意图;
50.图2是本实用新型实施例一中检测光源的结构示意图;
51.图3是本实用新型实施例一中高效过滤器和天花龙骨的局部连接示意图;
52.图4是本实用新型实施例一中第二检测光源的结构示意图;
53.图5是本实用新型实施例一中ffu装置的立体图;
54.图6是图5的局部主视图;
55.图7是图6中风扇的结构示意图;
56.图8是图6中风扇和检测光源之间的距离关系示意图。
57.其中:1、上载具;2、检测光源;3、下载具;4、接收器;5、高效过滤器;6、天花龙骨;7、led点状光源;8、风机;21、彩色灯珠。
具体实施方式
58.结合附图及实施例对本实用新型作进一步描述:
59.实施例一
60.参见图1~7所示,一种用于洁净室建成之后的ffu装置的检漏系统,所述ffu装置位于洁净室的天花板上;
61.包括检测机构、定位系统、数据传输系统和控制系统;
62.所述检测机构包括至少一组检测设备,该检测机构用于高效过滤器5的检漏测试;每一组所述检测机构包括上载具1、检测光源2、下载具3和接收器4;所述上载具用于搭载所述检测光源,并具有x、y、z三维的运动自由度(上载具位于ffu的风机8的上方);所述检测光源呈环形,其具有至少一组彩色灯珠21,每一组彩色灯珠由红灯珠、橙灯珠、黄灯珠、绿灯珠、蓝灯珠、青灯珠、紫灯珠依次顺序构成;所述检测光源发出的光呈圆台形;所述下载具用于搭载所述接收器,并具有x、y、z三维的运动自由度;每一组所述检测设备的检测光源和接收器上下一一对应设置,所述接收器用于接收所述检测光源的光信号;
63.所述定位系统用于所述上载具和下载具的定位;所述检测机构通过所述控制系统控制、在定位系统的定位下对高效过滤器进行检漏测试。所述检测机构还包括至少一组第二检测设备,所述第二检测设备用于高效过滤器5和天花龙骨6之间的检漏测试;
64.每一组第二检测设备包括第二上载具、第二检测光源、第二下载具和第二接收器;所述第二检测光源呈矩形,其由复数个led点状光源7构成。
65.还包括数据分析系统,所述数据分析系统用于分析由所述数据传输系统传输过来的数据。所述数据分析系统为ai智能数据分析系统。所述第二上载具为无人机,所述第二下载具为无人机。所述上载具为无人机,所述下载具为无人机。所述接收器为cmos image sensor。
66.所述检测光源上的彩色灯珠向下向外倾斜,倾斜角为θ;参见图8,使得所述检测光源发出的光呈圆台形。
67.采用上述检漏系统进行检漏,包括如下步骤:
68.(1)先对洁净室进行全域清洁;然后开启所述ffu装置,检测其是否正常运行:若ffu装置正常运行,则进入下一步骤;否则需要对ffu装置进行检修或更换;
69.(2)采用2组检测设备,配合定位系统和数据传输系统对所述ffu装置内的高效过滤器进行检漏测试;将检测数据收集起来;
70.参见图1,第一组检测设备用于高效过滤器5检漏;其包括上载具1、检测光源2、下载具3和接收器4;所述上载具用于搭载所述检测光源,并具有x、y、z三维的运动自由度(上载具位于ffu的风机8的上方);所述检测光源呈环形,参见图2,其具有2组彩色灯珠21,每一组彩色灯珠由红灯珠、橙灯珠、黄灯珠、绿灯珠、蓝灯珠、青灯珠、紫灯珠依次顺序构成;所述
检测光源发出的光呈圆台形;所述下载具用于搭载所述接收器,并具有 x、y、z三维的运动自由度;每一组所述检测设备的检测光源和接收器上下一一对应设置,所述接收器用于接收所述检测光源的光信号;检测时,所述检测光源处于旋转状态;
71.参见图3,第二组检测设备用于高效过滤器5和天花龙骨6之间的检漏测试,其包括第二上载具、第二检测光源、第二下载具和第二接收器(与第一组检测设备相似,不在另外设置附图);所述第二检测光源呈矩形,参见图4,其由复数个led点状光源7构成;
72.第一、二组检测设备的检测作业可以分别各自进行,不分先后;
73.(3)将上述步骤(2)得到的检测数据进行分析,若是某处具有不同颜色的光点情况,需要进行判断:
74.(a)若泄漏的光点颜色中具有长波长的光点颜色时,则判定该处有泄漏;
75.(b)若泄漏的光点颜色中均为短波长的光点颜色时,则采用单一颜色的长波长光源,按照上述步骤(2)的方式进行复测,若是出现该长波长光源,则判定为有泄漏,否则,则进行人工复查;
76.所述短波长的光点颜色为蓝、青、紫色;所述长波长的光点颜色为红、橙、黄、绿色。
77.所述检测作业可以通过控制系统来统一控制。所述定位系统是用来定位检测设备的,从而控制其按照设定的路线进行移动和检测。所述数据传输系统是用来将检测数据传输至指定的系统或设备上,以便对这些数据进行下一步的研究判断。
78.所述上载具和下载具是配套设置的,上载具用来搭载检测光源,而下载具用来搭载接收器。同时,检测光源和接收器也是配套设置的,检测光源用来发射光线,而接收器用来接收光信号。
79.所述检测光源呈圆环形,其具有2组彩色灯珠,且在检测时处于旋转状态(其旋转速度为400~450圈/min),在旋转状态下,可以将这些彩色灯珠混光,成为白光。所述检测光源发出的光呈圆台形,即灯珠是斜向下方设置的,其与纵轴线之间的夹角为倾斜角θ;参见图8。
80.本实用新型开创性的采用了七色彩光进行探测,把高效过滤器上的漏孔看成筛孔,当筛孔较小时,长波长过不去,只有短波长过得去;因此,当若泄漏的光点颜色中具有长波长的光点颜色时(或者干脆是合成的白光),则表示这个孔已经较大了,需要判定该处有泄漏,必须进行人工复查(基本上是必漏无疑的);反之,若泄漏的光点颜色中均为短波长的光点颜色时,则可能孔洞很小,也可能是滤材纤维间的缝隙,故需人工复查,人为再确认。
81.本实施例中,所述定位系统基于bim软件系统,用于检测设备的上载具和下载具的寻址定位。所述bim软件系统是现有技术,bim提供的是三维地图,做为导航用,本实用新型依于建筑三维模型,提供定位系统做为上下载具移动的参考标的与量测数据的寻址。
82.本实施例中,需要先对ffu装置和检测光源之间的距离h进行校正,以避免ffu装置内的风机及其扇叶产生的遮蔽影响,具体如下:
83.参见图2、5~8,所述检测光源呈圆环形,其直径为d,其上的彩色灯珠的倾斜角为θ;所述ffu装置的喇叭口入口直径为d,所述ffu装置的扇叶顶部与喇叭口边缘之间的距离为h;则:h=(d-d)/2tanθ-h。
84.由于ffu装置的型号较多,各自的规格也差异较大,因此除了采用上述方式进行校正之外,本实施例采用人工校正:先将上载具设置在ffu风扇上方,不装hepa,用检测光源照
射,而在ffu风扇下方设置接收器,从而确定上载具和ffu之间的距离(该步骤可以不在洁净室现场,也可以在ffu 工厂)。
85.本实施例中,所述检测设备根据所述定位系统对天花板上的ffu装置依序进行检测。所述步骤(2)在夜间进行。
86.对比例
87.采用和实施例相同的顺序和步骤,但完全采用采用微尘粒子计数器 (particle counter)及探头进行人工检测。
88.针对同一个百级洁净室,使用1.2m
×
1.2m ffu(假设面积15000平方米,约4200台ffu,高度为7.8米,必须使用脚手架才能扫描),实施例一的检测时间为70小时,对比例为4200台
×
8分钟/台=560个小时。由此可见,本实用新型的效率获得了实质性的改进。
89.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1