一种长航时无人机自主导航用红外阵列成像装置的制作方法
1.本实用新型涉及无人机自主导航技术领域,具体涉及一种长航时无人机自主导航用红外阵列成像装置。
背景技术:
2.长航时无人机导航系统采用的硬件可分为视觉导航系统和非视觉导航系统,其中,非视觉导航系统主要包括惯性导航和卫星导航,视觉导航系统一般通过搭载可见光摄像头或红外成像装置,红外成像具有适应性强,全天时工作的特点,红外成像探测器相对可见光ccd/cmos探测器规模小得多,使得红外成像系统在满足作用距离时往往难以兼顾成像视场要求,为获取较多的场景信息,使用特殊的光学镜片获得较大的视场角,但同时也使获取的图像畸变严重,影响后期测算的准确性和精准度,或者采用转动机构的方式获得大的视场范围,但存在每幅图像成像时刻不同以及转动机构带来的诸多问题,无法同时获得较大视场角及较高分辨率。
技术实现要素:
3.本实用新型的目的在于针对现有技术的缺陷和不足,提供一种长航时无人机自主导航用红外阵列成像装置,通过设置多个红外成像相机针对不同无人机设置不同的阵列排布,即对小型无人机,采用腹部的集中式阵列构型,对大型无人机,采用安装在不同部位的分布式阵列构型,且红外成像相机镜头依据要求安装方向不同,实现对多幅红外图像拼接,得到一张整幅红外图像,满足各种机型的需要;通过对位于周边的红外成像相机采用视场范围小、分辨率高的镜头,对位于中部的红外成像相机采用视场范围大,分辨率低的镜头,能够获得所需的大视场、高分辨率的整幅红外图像,为无人机提供全天时、连续、可靠的导航定位信息,彻底解决了现有技术中无法同时获取红外大视场角及较高分辨率图像的技术难题。
4.为实现上述目的,本实用新型采用的技术方案:
5.一种长航时无人机自主导航用红外阵列成像装置方法,包括红外成像相机,所述红外成像相机设有若干个,依据预设的阵列构型安装在无人机底部,所述红外成像相机的镜头光轴与竖向设有夹角,所述阵列构型中所有镜头的光轴相交于一点;所述阵列构型包括分布式阵列构型和集中式阵列构型,所述分布式阵列构型包括所述红外成像相机分布安装在无人机机身的机头下方、机身腹部下方、机身尾部下方、左机翼下方及右机翼下方,其中,头部红外成像相机、腹部红外成像相机和尾部红外成像相机位于同列排布,左翼红外成像相机、右翼红外成像相机以所述腹部红外成像相机为中心对称排布;所述集中式阵列构型包括若干个所述红外成像相机集中安装在无人机机身腹部下方,且按照行与列的规则排布;其中,相邻的单幅图像之间设有重叠区域,所述重叠区域为拼接融合区域,所述拼接融合区域面积不小于所述单幅图像面积的百分之五。
6.在一些实施例中,所述阵列构型包括若干所述红外成像相机的分布式阵列构型和
集中式阵列构型,所述分布式阵列构型和所述集中式阵列构型均按照行与列的规则排布。
7.在一些实施例中,所述分布式阵列构型包括所述红外成像相机分布安装在无人机机身的不同位置,包括机头下方、机身腹部下方、机身尾部下方、左机翼下方及右机翼下方,其中,头部红外成像相机、腹部红外成像相机和尾部红外成像相机位于同列排布,左翼红外成像相机、右翼红外成像相机以所述腹部红外成像相机为中心对称排布。
8.在一些实施例中,所述头部红外成像相机斜向机头端部安装,所述尾部红外成像相机斜向机尾端部安装,所述左翼红外成像相机斜向机翼左侧安装,所述右翼红外成像相机斜向机翼右侧安装,所述腹部红外成像相机垂直向下安装,其中,所述头部红外成像相机、所述尾部红外成像相机、所述左翼红外成像相机、所述右翼红外成像相机的光轴延长线均与所述腹部红外成像相机的光轴相交于一点。
9.在一些实施例中,所述头部红外成像相机、所述尾部红外成像相机在平行于无人机机身方向上的对角线视场角均设为a1,所述左翼红外成像相机、所述右翼红外成像相机在垂直于无人机机身方向上的对角线视场角均设为 a2,腹部红外成像相机的对角线视场角设为b,所述分布式阵列构型的红外成像相机在该方向的总视场角设为a,则满足:b>a1、b>a2、a<2a1、a<2a2、 b≥a。
10.在一些实施例中,位于周边的所述头部红外成像相机、所述尾部红外成像相机、所述左翼红外成像相机、所述右翼红外成像相机的视场范围小,分辨率高;位于中部的所述腹部红外成像相机视场范围大,分辨率低。
11.在一些实施例中,所述集中式阵列构型中所述红外成像相机均按照预设要求斜向安装,且所有所述红外成像相机的光轴延长线均相交于一点。
12.在一些实施例中,所述红外成像相机在平行于无人机机身方向上的视场角均设为a,所述集中式阵列构型的红外成像相机在该方向的总视场角设为 q,则满足:q<2a。
13.有益效果
14.本实用新型提供的一种长航时无人机自主导航用红外阵列成像装置,通过设置多个红外成像相机针对不同无人机设置不同的阵列排布,即对小型无人机,采用腹部的集中式阵列构型,对大型无人机,采用安装在不同部位的分布式阵列构型,且红外成像相机镜头依据要求安装方向不同,实现对多幅红外图像拼接,得到一张整幅红外图像,满足各种机型的需要;通过对位于周边的红外成像相机采用视场范围小、分辨率高的镜头,对位于中部的红外成像相机采用视场范围大,分辨率低的镜头,能够获得所需的大视场、高分辨率的整幅红外图像,为无人机提供全天时、连续、可靠的导航定位信息,彻底解决了现有技术中无法同时获取红外大视场角及较高分辨率图像的技术难题。
附图说明
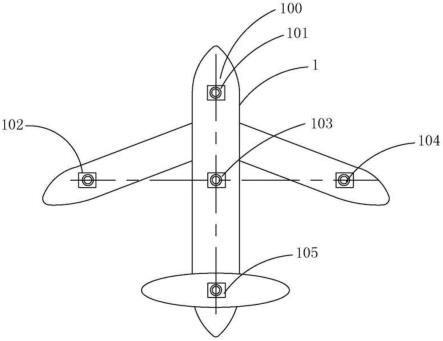
15.图1为本实用新型实施例提供的一种长航时无人机自主导航用红外阵列成像装置分布式阵列构型结构示意图;
16.图2为图1中处于同一列的头部红外成像相机、尾部红外成像相机、腹部红外成像相机在平行于无人机机身方向上的对角线视场角及红外成像装置在该方向的总视场角的阵列排布构型示意图;
17.图3为图1中处于同一行的左翼红外成像相机、腹部红外成像相机、右翼红外成像
相机在垂直于无人机机身方向上的对角线视场角的阵列排布构型示意图;
18.图4为图1中红外成像单元形成的图像,拼接形成的一整幅红外图像结构示意图;
19.图5为本实用新型实施例提供的一种长航时无人机自主导航用红外阵列成像装置集中式阵列构型结构示意图;
20.图6为图5中处于一行的外成像相机在垂直于无人机机身方向上的视场角的阵列排布构型示意图;
21.图7为图5中红外成像单元形成的图像,拼接形成的一整幅红外图像结构示意图。
22.其中,附图标记说明:
23.无人机1;第一红外成像单元100;头部红外成像相机101;左翼红外成像相机102;腹部红外成像相机103;右翼红外成像相机104;尾部红外成像相机 105;第一拼接融合区域106;
24.第二红外成像单元200;一号红外成像相机201;二号红外成像相机202;三号红外成像相机203;四号红外成像相机204;第二拼接融合区域205。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.如图1-图7所示,本实用新型采用如下技术方案:
27.一种长航时无人机自主导航用红外阵列成像装置方法,包括红外成像相机,所述红外成像相机设有若干个,针对不同机型采用不同的阵列构型,针对大型的无人机1,第一红外成像单元100布局安装在无人机1的底部,针对小型的无人机1,第二红外成像单元200布局安装在无人机1的底部,所述红外成像相机的镜头光轴与竖向设有夹角,所述阵列构型中所有镜头的光轴相较于一点,其中,相邻的单幅图像之间设有重叠区域,所述重叠区域为拼接融合区域,所述拼接融合区域面积不小于所述单幅图像面积的百分之五。
28.本实用新型公开的第一实施例,如图1-图4所示:
29.一种长航时无人机自主导航用红外阵列成像装置方法,设有第一红外成像单元100,所述第一红外成像单元100设有多个红外成像相机,包括头部红外成像相机101、尾部红外成像相机105、左翼红外成像相机102、右翼红外成像相机104及腹部红外成像相机103,依据预设的阵列构型镜头朝向安装在无人机1机身的不同位置的底部,所述阵列构型为分布式阵列构型,适用于大型无人机1,所述分布式阵列构型按照行与列的规则排布。
30.所述头部红外成像相机101固定安装在无人机1的机头下方、所述尾部红外成像相机105固定安装在无人机1的机身尾部下方,腹部红外成像相机 103固定安装在无人机1的机身腹部下方、左翼红外成像相机102固定安装在无人机1的左机翼下方,所述右翼红外成像相机104固定安装在无人机1 的右机翼下方,其中,头部红外成像相机101、腹部红外成像相机103和尾部红外成像相机105位于同列排布,左翼红外成像相机102、右翼红外成像相机104以所述腹部红外成像相机103为中心对称排布。
31.所述红外成像相机的镜头光轴与竖向设有夹角,所述阵列构型中头部红外成像相
机101、腹部红外成像相机103、尾部红外成像相机105、左翼红外成像相机102、右翼红外成像相机104所有镜头的光轴均相较于一点p,见图 2,图3。
32.在示例中,如图2、图3所示,所述头部红外成像相机101斜向机头端部安装,所述尾部红外成像相机105斜向机尾端部安装,所述左翼红外成像相机102斜向机翼左侧安装,所述右翼红外成像相机104斜向机翼右侧安装,所述腹部红外成像相机103垂直向下安装。
33.所述头部红外成像相机101、所述尾部红外成像相机105在平行于无人机1机身方向上的对角线视场角均设为a1,如图2所示;所述左翼红外成像相机102、所述右翼红外成像相机104在垂直于无人机1机身方向上的对角线视场角均设为a2,如图3所示。
34.腹部红外成像相机103的对角线视场角设为b,所述分布式阵列构型的红外成像相机在该方向的总视场角设为a,则满足:b>a1、b>a2、a<2a1、a <2a2及b≥a。
35.头部红外成像相机101、左翼红外成像相机102、腹部红外成像相机103;右翼红外成像相机104、尾部红外成像相机105,相邻的单幅图像之间设有重叠区域,所述重叠区域为第一拼接融合区域106,其中,相邻的两个单幅图像的第一拼接融合区域106为相邻图像之间的拼接提供特征信息,保证良好的拼接效果和成功率,所述第一拼接融合区域106的面积不小于所述单幅图像面积的百分之五。
36.在一些示例中,位于周边的所述头部红外成像相机101、所述尾部红外成像相机105、所述左翼红外成像相机102、所述右翼红外成像相机104的视场范围小,分辨率高,位于中部的所述腹部红外成像相机103视场范围大,分辨率低,这种放置方法能够获得所需的大视场、高分辨率的整幅红外图像。
37.该装置利用第一红外成像单元100,可夜视、宽视场、高分辨的特点,利用多个红外成像相机分布式阵列排布于无人机不同位置,实现多幅红外图像的拼接,得到大视场、高分辨率的整幅红外图像,为无人机提供全天时、连续、可靠的导航定位信息。
38.本实用新型第二实施例,如图5-图7所示:
39.一种长航时无人机自主导航用红外阵列成像装置方法,设有第二红外成像单元200,所述第二红外成像单元200设有多个红外成像相机,包括一号红外成像相机201、二号红外成像相机202、三号红外成像相机203、四号红外成像相机204,依据预设的阵列构型镜头朝向安装在无人机1机身的腹部的底部,所述阵列构型为集中式阵列构型,适用于小型无人机1,所述集中式阵列构型按照行与列的规则排布。
40.在一些示例中,所述一号红外成像相机201、二号红外成像相机202、三号红外成像相机203、四号红外成像相机204均按照预设要求斜向安装,且所述一号红外成像相机201、二号红外成像相机202、三号红外成像相机 203、四号红外成像相机204的光轴延长线均相交于一点p。
41.在一些实施例中,所述二号红外成像相机202、四号红外成像相机204 在垂直于无人机机身方向上的视场角均设为a,所述集中式阵列构型的二号红外成像相机202、四号红外成像相机204在该方向的总视场角设为q,则满足:q<2a;同理,所述一号红外成像相机201、所述三号红外成像相机203 的设置与二号红外成像相机202、四号红外成像相机204相同,不在赘述。
42.在一些示例中,所述一号红外成像相机201、二号红外成像相机202、三号红外成像相机203、四号红外成像相机204,相邻的单幅图像之间设有重叠区域,所述重叠区域为第二
拼接融合区域205,其中,相邻的两个单幅图像的第二拼接融合区域205为相邻图像之间的拼接提供特征信息,保证良好的拼接效果和成功率,所述第二拼接融合区域205的面积不小于所述单幅图像面积的百分之五,实现多幅红外图像的拼接,得到大视场、高分辨率的整幅红外图像,为无人机提供全天时、连续、可靠的导航定位信息。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1