一种用于汽轮机零转速测量的调理电路的制作方法
1.本实用新型涉及一种汽轮机零转速测量装置。
背景技术:
2.汽轮机是电力行业的关键设备,一旦发生故障,造成的损失非常严重;而汽轮机转速是汽轮机安全运行的最重要的参数之一;转速测量的精度,稳定性,以及测量速度都极为重要;并且在汽轮机组的转速测量中,有一个零转速测量功能,即在机组转速下降到1rpm时能够检测到转速信号并发出报警连锁,该功能的实现主要依靠的是涡流传感器和霍尔传感器;涡流传感器的供电为-24v,信号是负偏置电压,信号的外形和幅度与测速齿轮的形状和传感器间隙相关,由于受偏心和振动等因素的影响,转子在旋转时检测的波形幅值和间隙电压会出线衰减和波动;而霍尔传感器的供电为正电压,输出波形接近方波,幅值与供电电压相关;由于两个传感器信号差异较大,现有的零转速测量装置均不会同时兼容这两种传感器,而导致其兼容性差。
技术实现要素:
3.本实用新型的目的是为了解决现有的零转速测量装置兼容性差的问题,提出了一种用于汽轮机零转速测量的调理电路。
4.本实用新型所述的一种用于汽轮机零转速测量的调理电路用于检测涡流传感器或霍尔传感器输出的传感信号,获得方波信号;
5.该调理电路包括第一信号处理电路、第二信号处理电路、整形电路和隔离电路;
6.所述第一信号处理电路用于将输入的传感信号转换为滤波信号,第一信号处理电路的滤波信号输出端与第二信号处理电路的滤波信号输入端相连;
7.所述第二信号处理电路用于将输入的滤波信号转换为脉冲信号,第二信号处理电路的脉冲信号输出端与整形电路的脉冲信号输入端相连;
8.所述整形电路用于将输入的脉冲信号转换为整形信号,整形电路的整形信号输出端与隔离电路的整形信号输入端相连;
9.所述隔离电路用于将输入的整形信号转换为方波信号。
10.本实用新型所述的调理电路的工作原理为:利用第一信号处理电路对涡流传感器或霍尔传感器输出的传感信号依次进行隔直、限幅和滤波处理,生成滤波信号;第一信号处理电路输出的滤波信号在经过第二信号处理电路进行设定门限电压,输出脉冲信号;第二信号处理电路输出的脉冲信号经过整形电路整形,输出整形信号;整形电路输出的整形信号最后经过隔离电路进行隔离,输出标准的方波信号;该调理电路输出的方波信号输入至mcu进行零转速计算;mcu根据相邻两个脉冲的周期计算出频率值,再根据汽轮机转子的齿数计算出每分钟的转速值;因此,该调理电路能够检测到最低0.5hz的转速信号。
11.本实用新型的有益效果是:该调理电路兼容性好,传感信号输入端能够适用涡流传感器或霍尔传感器;同时在调理电路中,由于第二信号处理电路具体设定门限电压的作
用,因此能够去除一些杂波干扰,即该调理电路抗干扰能力强;并且该调理电路能够检测到最低0.5hz的转速信号,即说明该调理电路检测精度高。
附图说明
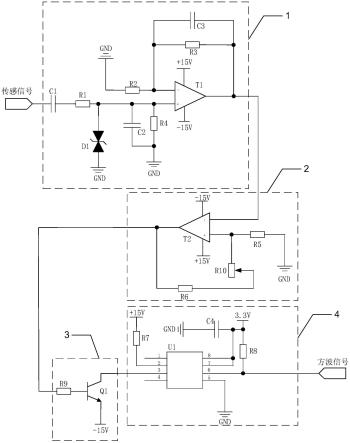
12.图1为具体实施方式一所述的一种用于汽轮机零转速测量的调理电路的电路图。
具体实施方式
13.具体实施方式一:结合图1说明本实施方式,本实施方式所述的一种用于汽轮机零转速测量的调理电路,该调理电路用于检测涡流传感器或霍尔传感器输出的传感信号,获得方波信号;
14.该调理电路包括第一信号处理电路1、第二信号处理电路2、整形电路3和隔离电路4;
15.所述第一信号处理电路1用于将输入的传感信号转换为滤波信号,第一信号处理电路1的滤波信号输出端与第二信号处理电路2的滤波信号输入端相连;
16.所述第二信号处理电路2用于将输入的滤波信号转换为脉冲信号,第二信号处理电路2的脉冲信号输出端与整形电路3的脉冲信号输入端相连;
17.所述整形电路3用于将输入的脉冲信号转换为整形信号,整形电路3的整形信号输出端与隔离电路4的整形信号输入端相连;
18.所述隔离电路4用于将输入的整形信号转换为方波信号。
19.具体实施方式二:本实施方式是对具体实施方式一所述的一种用于汽轮机零转速测量的调理电路进一步限定,在本实施方式中,所述第一信号处理电路1包括电容c1至电容c3、电阻r1至电阻r4、瞬态抑制二极管d1和一号放大器t1;
20.所述瞬态抑制二极管d1的型号为:smbj12ca;
21.电容c1的一端为第一信号处理电路1的传感信号输入端;
22.电容c1的另一端与电阻r1的一端相连;电阻r1的另一端同时与瞬态抑制二极管d1的一端、电容c2的一端、电阻r4的一端以及一号放大器t1的同相输入端相连;瞬态抑制二极管d1的另一端接地;电容c2的另一端与电阻r4的另一端相连,并接地;
23.一号放大器t1的正极接线端与+15v电源的输出端相连;一号放大器t1的负极接线端与-15v电源的输出端相连;
24.一号放大器t1的反相输入端同时与电阻r2的一端、电阻r3的一端以及电容c3的一端相连;电阻r2的另一端接地;
25.一号放大器t1的输出端同时与电阻r3的另一端以及电容c3的另一端相连,并且三者的公共端为第一信号处理电路1的滤波信号输出端。
26.在本实施方式中,检测涡流传感器或霍尔传感器输出的传感信号经过电容c1后变为一个纯交流信号,当纯交流信号幅值超过12v时,会被瞬态抑制二极管d1限幅,电容c2将高频的交流信号干扰滤掉,生成滤波信号;其中,电容c1的电容值为10μf;电容c2的电容值为10nf,电容c3的电容值为100pf;电阻r1的电阻值为300ω;电阻r2的电阻值为10kω;电阻r3的电阻值为30kω;电阻r4的电阻值为10kω;瞬态抑制二极管d1的电压幅值为12v;一号放大器t1的放大倍数是4倍。
27.具体实施方式三:本实施方式是对具体实施方式二所述的一种用于汽轮机零转速测量的调理电路进一步限定,在本实施方式中,所述第二信号处理电路2包括二号放大器t2、电阻r5、电阻r6和滑动变阻器r10;
28.二号放大器t2的反相输入端为第二信号处理电路2的滤波信号输入端;
29.二号放大器t2的正极接线端与+15v电源的输出端相连;二号放大器t2的负极接线端与-15v电源的输出端相连;
30.二号放大器t2的同相输入端同时与电阻r5的一端以及滑动变阻器r10的固定端相连;电阻r5的另一端接地;滑动变阻器r10的移动端与电阻r6的一端相连;
31.二号放大器t2的输出端与电阻r6的另一端相连,两者的公共端为第二信号处理电路2的脉冲信号输出端。
32.在本实施方式中,电阻r5的电阻值为30kω;电阻r6电阻值为91kω;滑动变阻器r10最大电阻值为10kω。
33.具体实施方式四:本实施方式是对具体实施方式三所述的一种用于汽轮机零转速测量的调理电路进一步限定,在本实施方式中,所述第二信号处理电路2的脉冲信号输出端的电压调整范围是0.18v至0.36v。
34.在本实施方式中,设置一个固定的门限电压与滤波信号进行比较;例如滑动变阻器r10调到中间位置,门限电压调到0.25v,当输入滤波信号(去除直流分量后)的幅值超过0.25v时,二号放大器t2输出有效脉冲信号。
35.具体实施方式五:本实施方式是对具体实施方式三所述的一种用于汽轮机零转速测量的调理电路进一步限定,在本实施方式中,所述整形电路3包括三极管q1和电阻r9;
36.所述电阻r9的一端为整形电路3的脉冲信号输入端;电阻r9的另一端与三极管q1的基极相连;
37.三极管q1的发射极与-15v电源的输出端相连;
38.三极管q1的集电极为整形电路3的整形信号输出端。
39.在本实施方式中,三极管q1的型号为:mmbt5401;电阻r9的电阻值为10kω。
40.具体实施方式六:本实施方式是对具体实施方式五所述的一种用于汽轮机零转速测量的调理电路进一步限定,在本实施方式中,所述隔离电路4包括电阻r7、电阻r8、电容c4和光电耦合器u1;
41.所述光电耦合器u1的型号为:6n137s(ta);
42.光电耦合器u1的2号引脚与电阻r7的一端相连,电阻r7的另一端与+15v电源的输出端相连;
43.光电耦合器u1的3号引脚为隔离电路4的整形信号输入端;
44.光电耦合器u1的5号引脚接地;
45.光电耦合器u1的6号引脚与电阻r8的一端相连,两者的公共端为隔离电路4的方波信号输出端;
46.光电耦合器u1的7号引脚同时与光电耦合器u1的8号引脚、电容c4的一端以及阻r8的另一端相连,并接电源3.3v的供电端;电容c4的另一端接地。
47.在本实施方式中,电容c4的电容值为100nf;电阻r7的电阻值为3kω;电阻r8的电阻值为1kω。
48.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1