视觉系统传感器用标定装置的制作方法
1.本实用新型属于视觉系统传感器标定技术领域,具体涉及一种视觉系统传感器用标定装置。
背景技术:
2.随着人工智能的快速发展,越来越多的只能机器人在实际的生产、生活中得到应用,传感器是智能机器人感知外部环境的重要元件,基于此,多传感器数据融合已经成为智能机器人领域的热门技术。智能机器人中的一个重要感知系统是视觉系统,视觉系统包括激光雷达、摄像机等传感器,由于视觉系统中的传感器种类不是单一的,因而需要对传感器进行联合标定来实现多传感器的数据融合。
3.现有的标定装置一般为二维标定板,二维标定板主要分为二维棋盘格阵标定板和二维圆点阵标定板,主要结构都是在一个平面板上张贴或印刷规则排列的黑白棋盘格或圆点,所有棋盘格点都是处于一个平面上,靠颜色区分进行标定,这种标定方式往往只能满足二维传感器的标定需求,但是不能形成深度信息,导致三维传感器无法识别这些点阵图案。
4.为了使二维标定板满足三维传感器的标定需求,需要在标定过程中调节二维标定板的姿态,姿态越多标定准确度越高。目前,对二维标定板姿态的调节主要通过手持标定板调节,或者通过专用的姿态调整设备进行调节。手持调节的方式容易因操作者的手发生抖动导致标定板姿态不稳,影响标定精度;而现有的调节设备往往又因结构复杂、体积庞大造成使用上的不变,导致难以推广。上述不利因素均增加了视觉系统传感器的标定难度和操作成本,对智能机器人的整体性能和生产成本均产生了负面影响。
技术实现要素:
5.本实用新型实施例提供一种视觉系统传感器用标定装置,旨在解决现有技术中存在的采用二维标定板进行三维传感器的标定操作难度大,成本高的问题。
6.为实现上述目的,本实用新型采用的技术方案是:
7.提供一种视觉系统传感器用标定装置,包括:
8.基板、多个第一标定模块和多个第二标定模块;
9.所述第一标定模块和所述第二标定模块均为方形体,且所述第一标定模块和所述第二标定模块在所述基板的安装板面上呈棋盘格状交错分布;
10.所述第一标定模块远离所述基板的一侧面形成第一标定面,所述第二标定模块远离所述基板的一侧面形成第二标定面,所述第一标定面和所述第二标定面均为相互平行并且面积相同的漫反射面,且所述第一标定面和所述第二标定面之间具有明显色差;
11.其中,所述第一标定模块与所述基板之间,以及所述第二标定模块与所述基板之间均可拆卸连接。
12.在一种可能的实现方式中,所述第一标定面和所述第二标定面均平行于所述安装板面。
13.在一种可能的实现方式中,所述第一标定模块和所述第二标定模块均包括标定面块和至少一个堆叠块,所述标定面块和所述堆叠块均为方形体,并均具有相对设置的第一侧面和第二侧面;
14.所述标定面块的第一侧面和所述堆叠块的第一侧面均设有第一插接结构,所述堆叠块的第二侧面和所述基板上均设有第二插接结构;
15.所述第一插接结构与所述基板上的所述第二插接结构或相邻所述堆叠块上的所述第二插接结构在垂直于所述安装板面的方向上插接配合;
16.所述标定面块的第二侧面形成所述第一标定面或所述第二标定面。
17.在一种可能的实现方式中,所述安装板面为漫反射面,所述安装板面上形成呈棋盘格状交错分布的第一标定区域和第二标定区域,所述第一标定区域和所述第二标定区域之间具有明显色差。
18.在一种可能的实现方式中,所述第一插接结构分布于所述第一侧面的中心位置,所述第二插接结构分布于所述第二侧面的中心位置。
19.在一种可能的实现方式中,所述标定面块和所述堆叠块的横断面面积相等。
20.在一种可能的实现方式中,所述标定面块和所述堆叠块的高度相等。
21.在一种可能的实现方式中,所述第一标定面和所述第二标定面上均形成有第一标定点和第二标定点,所述第一标定点和所述第二标定点对角设置。
22.在一种可能的实现方式中,所述第一标定面上的所述第一标定点与相邻所述第二标定面上的所述第一标定点的间距均相同;
23.所述第一标定面上的所述第二标定点与相邻所述第二标定面上的所述第二标定点的间距均相同。
24.在一种可能的实现方式中,所述第一标定点和所述第二标定点均为盲孔结构、平面图案和凸起结构的至少其中之一。
25.本技术实施例所示的方案,与现有技术相比,通过第一标定面和第二标定面的棋盘格状分布,结合两者之间的色差,在二维传感器正对第一标定面和第二标定面时,能形成二维的标定信息;同时,由于第一标定模块和第二标定模块分别与基板进行可拆卸连接,通过合理的选择第一标定模块和第二标定模块的高度,可以使第一标定面和第二标定面形成高度差,继而形成了针对三维传感器的深度信息。本技术的视觉系统传感器用标定装置不仅适用于二维传感器的标定,在不调整姿态的情况下,还能适应三维传感器的标定,装置整体结构简单紧凑,操作方便,大幅度降低了标定难度和标定成本,保证了标定结果的准确性和可靠性。
附图说明
26.图1为本实用新型一实施例采用的基板的主视结构示意图;
27.图2为图1的俯视图;
28.图3为本实用新型一实施例提供的视觉系统传感器用标定装置的使用状态示意图一;
29.图4为本实用新型一实施例采用的两个堆叠块之间的装配示意图;
30.图5为本实用新型一实施例提供的视觉系统传感器用标定装置的使用状态示意图
二;
31.图6为本实用新型一实施例采用的标定面块和堆叠块的装配示意图;
32.图7为图5的俯视图;
33.图8为本实用新型另实施例采用的第一标定面和第二标定面的俯视配合图。
34.附图标记说明:
35.10、视觉系统传感器用标定装置;
36.100、基板;100、安装板面;111、第一标定区域;112、第二标定区域;
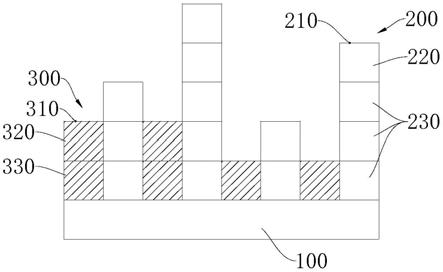
37.200、第一标定模块;210、第一标定面;220、标定面块;230、堆叠块;240、第一标定点;250、第二标定点;
38.300、第二标定模块;310、第二标定面;320、标定面块;330、堆叠块;340、第一标定点;350、第二标定点;
39.400、第一插接结构;
40.500、第二插接结构;
41.20、视觉系统传感器。
具体实施方式
42.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
43.请一并参阅图3及图5,现对本实用新型提供的视觉系统传感器用标定装置10进行说明。所述视觉系统传感器用标定装置,包括基板100、多个第一标定模块200和多个第二标定模块300;第一标定模块200和第二标定模块300均为方形体,且第一标定模块200和第二标定模块300在基板100的安装板面110上呈棋盘格状交错分布;第一标定模块200远离基板100的一侧面形成第一标定面210,第二标定模块300远离基板100的一侧面形成第二标定面310,第一标定面210和第二标定面310均为相互平行并且面积相同的漫反射面,且第一标定面210和第二标定面310之间具有明显色差。其中,第一标定模块200与基板100之间,以及第二标定模块300与基板100之间均可拆卸连接。
44.本实施例在使用时,视觉系统传感器20正对第一标定面210和第二标定面310,第一标定面210和第二标定面310能形成如图7所示的二维平面图像,以用于二维的视觉系统传感器20的标定,并且,由于第一标定模块200和第二标定模块300之间通过高度差的不同形成如图3或图5所示的结构,继而在三维的视觉系统传感器20的感测路径(如图3中箭头所示路径,其垂直于安装板面110)上形成深度信息。
45.另外,本实施例能根据实际情况进行不同的第一标定面210和第二标定面310的高度设置,并不限于图3或图5所示的形式,能满足对深度信息的需求即可,在此不再一一列举。
46.本实施例中的第一标定模块200和第二标定模块300的形状可以是正方体,也可以是长方体,其能在安装板面110上形成正方形或长方形的投影形状即可,但需要注意的是,同一个视觉系统传感器用标定装置10中的第一标定模块200和第二标定模块300在安装板面110上的正投影的形状、尺寸应当相同,以保证形成均匀的棋盘格状分布方式。
47.本实施例中,第一标定面210和第二标定面310之间的色差以形成鲜明的颜色深浅对比为宜,可采用第一标定面210为白色,第二标定面310为黑色的设置方式,当然,也可采用其他配色方式,能满足标定需求即可。对于第一标定模块200和第二标定模块300外周面和与安装板面110接触的一侧面的颜色在此不做限定,其对标定过程没有影响,可以选择与对应的标定面同样的颜色,也可以是其他颜色。
48.本实施例中的漫反射面为磨砂表面、亚光面等具有一定粗糙度的表面,能形成漫反射,以能够避免高光反射即可。
49.本实施例提供的视觉系统传感器用标定装置10,与现有技术相比,通过第一标定面210和第二标定面310的棋盘格状分布,结合两者之间的明显色差,在二维传感器正对第一标定面210和第二标定面310时,能形成二维的标定信息;同时,由于第一标定模块200和第二标定模块300分别与基板100进行可拆卸连接,通过合理的选择第一标定模块200和第二标定模块300的高度,可以使第一标定面210和第二标定面310的高度差,继而形成了针对三维传感器的深度信息。本技术的视觉系统传感器用标定装置不仅适用于二维传感器的标定,在不调整姿态的情况下,还能适应三维传感器的标定,装置整体结构简单紧凑,操作方便,大幅度降低了标定难度和标定成本,保证了标定结果的准确性和可靠性。
50.需要说明的是,所有的第一标定模块200和所有的第二标定模块300也存在高度完全相同的使用状态,这种使用状态能满足二维标定的需求,但不形成深度信息。
51.另一些实施例采用如图1至图6所示结构,第一标定面210和第二标定面310均平行于安装板面110。本实施例在使用可拆卸连接方式的基础上,降低了第一标定模块200、第二标定模块300和可拆卸连接结构的设计难度,降低制造成本。
52.具体实施时,可以第一标定模块200与基板100之间,以及第二标定模块300与基板100之间可采用插接、卡接等方式,在此不做唯一限定。
53.在上述实施例的基础上,可拆卸连接方式可以采用如图1至图7所示的插接式结构,具体的,第一标定模块200和第二标定模块300均包括标定面块(220,320)和至少一个堆叠块(230,330),标定面块(220,320)和堆叠块(230,330)均为方形体,并均具有相对设置的第一侧面和第二侧面;标定面块(220,320)的第一侧面和堆叠块(230,330)的第一侧面均设有第一插接结构400,堆叠块(230,330)的第二侧面和基板100上均设有第二插接结构500;第一插接结构400与基板100上的第二插接结构500或相邻堆叠块(230,330)上的第二插接结构500在垂直于安装板面110的方向上插接配合;标定面块(220,320)的第二侧面形成第一标定面210或第二标定面310。
54.本实施例将第一标定模块200和第二标定模块300的结构进行分解,形成积木式的插拔连接方式,由于能够通过插接的方式使不同数量的堆叠块(230,330)形成对应的标定模块,使得单个标定模块的高度可以灵活调节,无需分别制备高度不同的标定模块,进一步提升了使用灵活性和便捷性,还能在使用完毕后将各个构件分别拆解收纳,收纳占用空间小,使用成本更低。本实施例中的第一插接结构400为插槽和插块的其中之一,对应的,第二插接结构500为插槽和插块的其中之另一;本实施例示例性的将第一插接结构400设为插槽,第二插接结构500设为插块;本实施例中的插块示例性的被示出为圆柱块,插槽对应为圆槽,但需要理解的是,插块和插槽的形状和数量并不限定于附图中所展示的形状,能满足插接装配需求即可。
55.需要说明的为,为了保证第一标定模块200和第二标定模块300高度的可控性,在同一个视觉系统传感器用标定装置10中,插块的高度和插槽的深度应保持一致。
56.基于上述插接结构,本实施例的视觉系统传感器用标定装置10具有以下两类使用方式:
57.1)在若干个插接堆叠的堆叠块(230,330)所形成的堆垛结构的自由端盖设对应的标定面块(220,320),形成如图5所示的状态,此时的第一标定面210和第二标定面310均为平面,继而能够适应摄像机、激光雷达等多种类传感器的标定。
58.2)干个插接堆叠的堆叠块(230,330)所形成的堆垛结构的自由端不设置标定面块(220,320),该堆垛结构的自由端即形成第一标定面210和第二标定面310,由于存在第二插接结构500,此时的第一标定面210和第二标定面310均不为平面,这种使用方式能够适应摄像机这类传感器的标定,但对激光雷达并不适用。
59.上述两种使用方式可根据使用需求灵活选择。
60.为了简化上述插接结构的设计,同时保证插接的可靠性,可以采用如图4及图6所示结构,第一插接结构400分布于第一侧面的中心位置,对应的,第二插接结构500分布于第二侧面的中心位置。本实施例的设置方式还能在采用上述的使用方式2)进行标定时,避免第二插接结构500影响标定准确性。
61.在一些实施例中,上述基板可以采用如图1及图2所示结构,安装板面110为漫反射面,安装板面110上形成呈棋盘格状交错分布的第一标定区域111和第二标定区域112,第一标定区域111和第二标定区域112之间具有明显色差。本实施例中,第一标定区域111和第二标定区域112之间的色差要求与第一标定面210和第二标定面310的色差要求类似,在此不再赘述。由于在安装板面110上形成了呈棋盘格状交错分布的第一标定区域111和第二标定区域112,基板100可作为单独的二维标定板使用,仅形成二维平面信息,在安装第一标定模块200和第二标定模块300后,就作为具有深度信息的立体标定装置使用,使用灵活性更强。
62.为了简化结构设计,本实施例示例性的将第一标定区域111与第一标定模块200的安装位置对应,将第二标定区域112与第二标定模块300的安装位置对应,第二插接结构500分别位于对应的第一标定区域111和第二标定区域112的中心位置。
63.一些实施例采用如图3及图5所示的结构,标定面块(220,320)和堆叠块(230,330)的横断面面积相等,增加第一标定模块200外壁与第二标定模块外壁的贴合面积,提升结构稳定性。
64.在上述实施例的基础上采用如图4及图6所示结构,标定面块(220,320)和堆叠块(230,330)的高度相等,简化设计难度,增强通用性。本实施例示例性的将标定面块(220,320)和堆叠块(230,330)均设置为边长10cm的正方体,当然,也可将标定面块(220,320)和堆叠块(230,330)均设置为尺寸相同的长方体,在此不做唯一限定。
65.一些实施例采用如图8所示结构,第一标定面210和第二标定面310上均形成有第一标定点(240,340)和第二标定点(250,350),第一标定点(240,340)和第二标定点(250,350)对角设置。本实施例中的第一标定点(240,340)和第二标定点(250,350)用于在传感视觉系统传感器20标定的过程中帮助其找到角点,继而实现更快速准确的标定;同时,还能在传感器获取的图像中对辨识棋盘网格的上下左右方向起到辅助作用,避免因棋盘网格上下左右的对称排列而把图像认反。
66.以图8的视角为例,本实施例示例性的将第一标定点(240,340)和第二标定点(250,350)设置在对应标定面的左上角和右下角,当然,也可以将第一标定点(240,340)和第二标定点(250,350)设置在对应标定面的右上角和左下角,保持对角设置即可。
67.一些实施例中采用如图8所示结构,第一标定面210上的第一标定点240与相邻第二标定面310上的第一标定点340的间距均相同;第一标定面210上的第二标定点250与相邻第二标定面310上的第二标定点350的间距均相同。本实施例的“等距”设计增强了棋盘网格图像的规律性,有利于保证标定的准确性和快捷性。
68.在一些实施例中,第一标定点(240,340)和第二标定点(250,350)均为盲孔结构、平面图案和凸起结构的至少其中之一。具体实施时,以第一标定点(240,340)为例,第一标定点(240,340)可以单独采用盲孔结构、平面图案或凸起结构的其中之一,或者,也可采用盲孔与平面图案两者结合的方式,或者,也可以采用盲孔结构、平面图案和凸起结构三者结合的方式,对于第二标定点(250,350)的设置方式也是类似的,在此不再赘述。
69.本技术的视觉系统传感器用标定装置10可以同时利用立体棋盘格,一方面可以为二维传感器的标定提供色差背景,以使二维图像上产生清晰可辨的色差方格,实现二维传感器的内外参数标定,另一方面为三维成像提供标准的深度差,利用立体棋盘格的深度信息成像为深度不同的点云,为三维传感器深度畸变系数的标定提供必需的输入,实现对三维传感器进行标定,标定操作过程简单,无需调整姿态,标定精度高;其中的堆叠块和标定面块的插拔连接方式使得各个标定模块的高度可定制化,装置整体制造难度低,成本低廉,且拆装方便,收纳容易。
70.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1