一种4D毫米波雷达系统模组及4D毫米波雷达系统的制作方法
一种4d毫米波雷达系统模组及4d毫米波雷达系统
技术领域
1.本实用新型涉及毫米波雷达系统技术领域,尤其涉及一种4d毫米波雷达系统模组及4d毫米波雷达系统。
背景技术:
2.随着汽车技术的日益发展,汽车的智能化程度也越来越高,汽车驾驶也朝智能驾驶方向进行深度发展。
3.4d毫米波雷达系统具有实时障碍检测、远距离探测、物体高度分离等多方面优势,已经成为汽车智能驾驶向更高阶发展必不可少的传感器。
4.目前,各在雷达生产厂家的汽车雷达可以提供多片mmic(monolithic microwave integrated circuit,单片微波集成电路)的级联方案,例如,传统的4d毫米波雷达系统主要采用4片mmic和1个电子控制单元(electronic control unit,电子控制单元,又称“行车电脑”、“车载电脑”)的架构方式(如图1所示),这种架构方式中,电子控制单元外围的通信接口数量将决定只能级联多少片mmic。在图1所示的现有4d毫米波雷达系统中,1个电子控制单元外接只能接4片mmic,只能实现12发16收192个虚拟通道。
5.但是,上述的现有架构方式中,当要求更高的角分辨率和垂直分辨率时,现有的mmic与电子控制单元的通信接口将变得不再富余,4d毫米波雷达系统无法再提供更高的角分辨率和垂直分辨率,无法满足更高阶智能驾驶的需求。
6.所以,需要提出一种新的4d毫米波雷达系统,以满足更高阶智能驾驶的需求。
技术实现要素:
7.本实用新型实施例旨在提供一种4d毫米波雷达系统模组及4d毫米波雷达系统,可以解决现有的4d毫米波雷达系统无法再提供更高的角分辨率和垂直分辨率,无法满足更高阶智能驾驶的需求的问题。
8.为解决上述技术问题,本实用新型第一方面实施例提供一种4d毫米波雷达系统模组,所述4d毫米波雷达系统模组包括:至少1片接口模组和若干片单片微波集成电路,每片所述接口模组级联4片所述单片微波集成电路,每片所述接口模组的输出端与电子控制单元电性连接。
9.可选地,所述接口模组包括4片串行器和1片解串器,所述解串器分别与4片所述串行器电性连接。
10.可选地,每片所述串行器至少包括一个输入端和一个输出端,所述输入端级联1片所述单片微波集成电路,4片所述串行器的输入端构成所述接口模组的四个输入端,并各自级联1片所述单片微波集成电路。
11.可选地,所述解串器至少包括四个输入端和一个输出端;所述解串器的四个输入端各自与四个所述串行器的输出端电性连接;所述解串器的输出端作为所述接口模组的输出端与电子控制单元电性连接。
12.可选地,所述串行器通过以下任一连接方式与所述解串器电性连接:同轴线、高速连接器、印刷线路板走线。
13.相应地,本实用新型第二方面实施例提供一种4d毫米波雷达系统,所述4d毫米波雷达系统包括电子控制单元和4d毫米波雷达系统模组,所述4d毫米波雷达系统模组与所述电子控制单元电性连接;其中,所述4d毫米波雷达系统模组包括:至少1片接口模组和若干片单片微波集成电路,每片所述接口模组级联4片所述单片微波集成电路,每片所述接口模组的输出端与所述电子控制单元电性连接。
14.可选地,所述接口模组包括4片串行器和1片解串器,所述解串器分别与4片所述串行器电性连接。
15.可选地,每片所述串行器至少包括一个输入端和一个输出端,所述输入端级联1片所述单片微波集成电路,4片所述串行器的输入端构成所述接口模组的四个输入端,并各自级联1片所述单片微波集成电路。
16.可选地,所述解串器至少包括四个输入端和一个输出端;所述解串器的四个输入端各自与四个所述串行器的输出端电性连接;所述解串器的输出端作为所述接口模组的输出端与所述电子控制单元电性连接。
17.可选地,所述串行器通过同轴线、高速连接器、或者印刷线路板走线与所述解串器电性连接;和/或,
18.所述接口模组的输出端通过同轴线、高速连接器、或者印刷线路板走线与所述电子控制单元电性连接。
19.与现有技术相比较,本实用新型实施例提供的一种4d毫米波雷达系统模组及4d毫米波雷达系统,通过4d毫米波雷达系统模组包括至少1片接口模组和若干片单片微波集成电路,每片所述接口模组级联4片所述单片微波集成电路,每片所述接口模组的输出端与电子控制单元电性连接。从而通过所述4d毫米波雷达系统模组与4d毫米波雷达系统的电子控制单元电性连接,可以使现有的4d毫米波雷达系统的电子控制单元外接单片微波集成电路扩展到原来的4倍,极大地扩展了4d毫米波雷达系统的角分辨率和垂直分辨率。
附图说明
20.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
21.图1是现有技术提供的一种4d毫米波雷达系统的结构示意图;
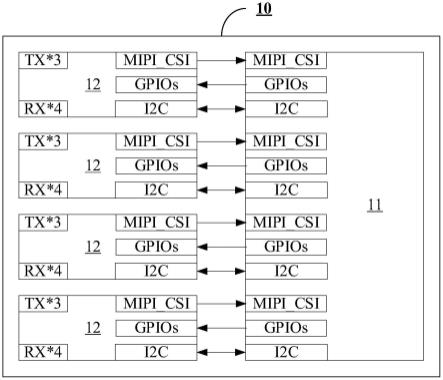
22.图2是本实用新型提供的一种4d毫米波雷达系统模组的结构示意图;
23.图3是本实用新型提供的一种4d毫米波雷达系统模组中接口模组的结构示意图;
24.图4是本实用新型提供的一种4d毫米波雷达系统模组中接口模组的另一结构示意图;
25.图5是本实用新型提供的一种4d毫米波雷达系统的结构示意图。
具体实施方式
26.为了便于理解本实用新型,下面结合附图和具体实施例,对本实用新型进行更详
细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“上”、“下”、“内”、“外”、“底部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
27.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本说明书中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本实用新型。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
28.此外,下面所描述的本实用新型不同实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
29.在一个实施例中,如图2所示,本实用新型提供一种4d毫米波雷达系统模组,所述4d毫米波雷达系统模组10包括:至少1片接口模组11和若干片单片微波集成电路12,每片所述接口模组11级联4片所述单片微波集成电路12,每片所述接口模组11的输出端与电子控制单元电性连接。
30.在本实施例中,通过4d毫米波雷达系统模组包括至少1片接口模组和若干片单片微波集成电路,每片所述接口模组级联4片所述单片微波集成电路,每片所述接口模组的输出端与电子控制单元电性连接。从而通过所述4d毫米波雷达系统模组与4d毫米波雷达系统的电子控制单元电性连接,可以使现有的4d毫米波雷达系统的电子控制单元外接单片微波集成电路扩展到原来的4倍,极大地扩展了4d毫米波雷达系统的角分辨率和垂直分辨率。
31.作为示例性,按照现有传统的4d毫米波雷达系统采用4片3发4收mmic和1个电子控制单元的架构方式,现有4d毫米波雷达系统的电子控制单元有4个mipi接口,1个电子控制单元外接只能接4片mmic,只能实现12发16收192个虚拟通道。而根据本实施例的4d毫米波雷达系统模组10,在同样采用1个现有的4d毫米波雷达系统的电子控制单元,在若干片单片微波集成电路12和1个电子控制单元之间电性连接4片所述接口模组11,每片所述接口模组11级联4片所述单片微波集成电路12,4片所述接口模组11级联16片所述单片微波集成电路12,4片所述接口模组11的4个输出端分别与所述电子控制单元的4个mipi接口电性连接,从而使1个电子控制单元可以外接16片所述单片微波集成电路12,可以实现48发64收3072个虚拟通道,极大地扩展了4d毫米波雷达系统的角分辨率和垂直分辨率,满足更高阶智能驾驶的需求。
32.在一个实施例中,如图3所示,所述接口模组11包括4片串行器111和1片解串器112,所述解串器112分别与4片所述串行器111电性连接。
33.具体地,每片所述串行器111至少包括一个输入端和一个输出端,所述输入端级联1片所述单片微波集成电路12,4片所述串行器111的输入端构成所述接口模组11的四个输入端,并各自级联1片所述单片微波集成电路12,从而使得1片所述接口模组11可以级联4片所述单片微波集成电路12。
34.所述解串器112至少包括四个输入端和一个输出端;所述解串器112的四个输入端各自与四个所述串行器111的输出端电性连接。所述解串器112的输出端作为所述接口模组11的输出端与电子控制单元电性连接。
35.在本实施例中,通过所述解串器112的四个输入端各自与四个所述串行器111的输出端电性连接,可以使1片所述解串器112级联4片所述单片微波集成电路12。如果有n片所述串行器111和n片所述解串器112,就可以n片所述解串器112级联4n片所述单片微波集成电路12,从而可以使现有的4d毫米波雷达系统的电子控制单元外接单片微波集成电路12扩展到原来的4倍,极大地扩展了4d毫米波雷达系统的角分辨率和垂直分辨率。
36.作为示例性,所述接口模组11采用德州仪器(ti,texas instruments)协议。
37.如图3所示,所述接口模组11包括串行器111,所述串行器111采用德州仪器协议,所述串行器111的输入端包括mipi_csi接口、gpios接口和i2c接口,通过所述mipi_csi接口、gpios接口和i2c接口分别与所述单片微波集成电路12的mipi_csi接口、gpios接口和i2c接口进行级联。所述串行器111的输出端为fpd_link接口。
38.采用德州仪器协议的所述串行器可以将mipi_csi信号转换为fpd_link信号,可以将所述单片微波集成电路111采集的原始感知数据通过mipi_csi接口传输给所述串行器,由所述串行器将mipi_csi的原始感知数据转换为fpd_link数据。
39.所述解串器112采用德州仪器协议,所述解串器112的四个输入端包括四个fpd_link接口,通过所述fpd_link接口与所述串行器111的fpd_link接口进行电性连接。所述解串器112的输出端包括mipi_csi2接口和i2c接口,通过所述mipi_csi2接口和i2c接口分别与电子控制单元的mipi_csi2接口和i2c接口电性连接。
40.作为另一示例性,所述接口模组11采用美信gmsl协议。
41.如图4所示,所述接口模组11包括串行器111,所述串行器111采用美信gmsl协议,所述串行器111的输入端包括mipi_csi接口、gpios接口和i2c接口,通过所述mipi_csi接口、gpios接口和i2c接口分别与所述单片微波集成电路12的mipi_csi接口、gpios接口和i2c接口进行级联。所述串行器111的输出端为gmsl接口。
42.采用美信gmsl协议的所述串行器可以将mipi_csi信号转换为gmsl信号,可以将所述单片微波集成电路111采集的原始感知数据通过mipi_csi接口传输给所述串行器,由所述串行器将mipi_csi的原始感知数据转换为gmsl数据。
43.所述解串器112为美信gmsl协议,所述解串器112的四个输入端包括四个gmsl接口,通过所述gmsl接口与所述串行器111的gmsl接口进行电性连接。所述解串器112的输出端包括mipi_csi2接口和i2c接口,通过所述mipi_csi2接口和i2c接口分别与电子控制单元的mipi_csi2接口和i2c接口电性连接。
44.在一个实施例中,所述串行器111通过同轴线、高速连接器、或者pcb(printed circuit board,印制电路板,又称印刷线路板)走线与所述解串器112电性连接。
45.基于同一构思,在一个实施例中,如图5所示,本实用新型提供一种4d毫米波雷达系统,所述4d毫米波雷达系统包括电子控制单元20和上述任一实施例所述的4d毫米波雷达系统模组10,所述4d毫米波雷达系统模组10与所述电子控制单元20电性连接。其中:
46.所述电子控制单元20,又称“行车电脑”、“车载电脑”,其英文名称为electronic control unit,简称为ecu。所述电子控制单元20具有运算与控制的功能,汽车发动机在运
行时,它采集各传感器的信号,进行运算,并将运算的结果转变为控制信号,控制被控对象的工作;以及还实行对存储器(rom/flash/eeprom、ram)、输入/输出接口(i/o)和其它外部电路的控制;存储器rom中存放的程序是经过精确计算和大量实验取得的数据为基础编写出来的,这个固有程序在发动机工作时,不断地与采集来的各传感器的信号进行比较和计算,把比较和计算的结果用来对发动机的点火、空燃比、怠速、废气再循环等多项参数的控制。
47.如图2所示,所述4d毫米波雷达系统模组10包括:至少1片接口模组11和若干片单片微波集成电路12,每片所述接口模组11级联4片所述单片微波集成电路12,每片所述接口模组11的输出端与所述电子控制单元电性连接。
48.作为示例性,按照现有传统的4d毫米波雷达系统采用4片3发4收mmic和1个电子控制单元的架构方式,现有4d毫米波雷达系统的电子控制单元有4个mipi接口,1个电子控制单元外接只能接4片mmic,只能实现12发16收192个虚拟通道。而根据本实施例的4d毫米波雷达系统模组10,在同样采用1个现有的4d毫米波雷达系统的电子控制单元,在若干片单片微波集成电路12和1个电子控制单元之间电性连接4片所述接口模组11,每片所述接口模组11级联4片所述单片微波集成电路12,4片所述接口模组11级联16片所述单片微波集成电路12,4片所述接口模组11的4个输出端分别与所述电子控制单元的4个mipi接口电性连接,从而使1个电子控制单元可以外接16片所述单片微波集成电路12,可以实现48发64收3072个虚拟通道,极大地扩展了4d毫米波雷达系统的角分辨率和垂直分辨率,满足更高阶智能驾驶的需求。
49.如图3所示,所述接口模组11包括4片串行器111和1片解串器112,所述解串器112分别与4片所述串行器111电性连接。
50.具体地,每片所述串行器111至少包括一个输入端和一个输出端,所述输入端级联1片所述单片微波集成电路12,4片所述串行器111的输入端构成所述接口模组11的四个输入端,并各自级联1片所述单片微波集成电路12,从而使得1片所述接口模组11可以级联4片所述单片微波集成电路12。
51.所述解串器112至少包括四个输入端和一个输出端;所述解串器112的四个输入端各自与四个所述串行器111的输出端电性连接。所述解串器112的输出端作为所述接口模组11的输出端与电子控制单元电性连接。
52.在本实施例中,通过所述解串器112的四个输入端各自与四个所述串行器111的输出端电性连接,可以使1片所述解串器112级联4片所述单片微波集成电路12。如果有n片所述串行器111和n片所述解串器112,就可以n片所述解串器112级联4n片所述单片微波集成电路12,从而可以使现有的4d毫米波雷达系统的电子控制单元外接单片微波集成电路12扩展到原来的4倍,极大地扩展了4d毫米波雷达系统的角分辨率和垂直分辨率。
53.进一步地,所述串行器111通过同轴线、高速连接器、或者pcb走线与所述解串器112电性连接。
54.进一步地,所述4d毫米波雷达系统模组10通过同轴线、高速连接器、或者pcb走线与所述电子控制单元20电性连接。具体地,所述接口模组的输出端通过同轴线、高速连接器、或者印刷线路板走线与所述电子控制单元20电性连接。
55.进一步地,所述单片微波集成电路通过所述接口模组将原始采集数据传递给所述
电子控制单元进行数据处理;具体地,所述单片微波集成电路通过所述串行器/解串器将原始采集数据传递给所述电子控制单元进行数据处理。
56.所述电子控制单元通过所述接口模组反向控制所述单片微波集成电路;具体地,所述电子控制单元通过所述解串器/串行器反向控制所述单片微波集成电路。
57.在本实施例中,通过所述4d毫米波雷达系统模组与所述电子控制单元电性连接,所述4d毫米波雷达系统模组包括至少1片接口模组和若干片单片微波集成电路,每片所述接口模组级联4片所述单片微波集成电路,每片所述接口模组的输出端与电子控制单元电性连接。从而通过在将4d毫米波雷达系统模组中若干片单片微波集成电路与电子控制单元之间的通信通过接口模组进行了中转扩展处理,可以使现有的4d毫米波雷达系统的电子控制单元外接单片微波集成电路扩展到原来的4倍,使4d毫米波雷达系统能级联更多的单片微波集成电路,极大地扩展了4d毫米波雷达系统的角分辨率、垂直分辨率和探测距离。且所述4d毫米波雷达系统模组作为单独的模组存在,与电子控制单元分离,接口通用,可以适用不同的电子控制单元,所述4d毫米波雷达系统模组与电子控制单元可以用同轴线进行供电和远距离通信,减少4d毫米波雷达系统尺寸,降低了对4d毫米波雷达系统安装的要求。
58.需要说明的是,上述4d毫米波雷达系统实施例与4d毫米波雷达系统模组实施例属于同一构思,其具体实现过程详见4d毫米波雷达系统模组实施例,且4d毫米波雷达系统模组实施例中的技术特征在所述4d毫米波雷达系统实施例中均对应适用,这里不再赘述。
59.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
60.上述本实用新型实施例序号仅仅为了描述,不代表实施例的优劣。
61.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;在本实用新型的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本实用新型的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1