一种水下地形测量设备
1.本实用新型涉及地形测量技术领域,特别是涉及一种水下地形测量设备。
背景技术:
2.地形测量指的是测绘地形图的作业。即对地球表面的地物、地形在水平面上的投影位置和高程进行测定,并按一定比例缩小,用符号和注记绘制成地形图的工作。水下地形测量是工程测量中的重要部分,也是服务新型基础测绘体系构建的重要一环。
3.传统的水下地形测绘是由人亲自驾驶船舶到某一水面区域进行测量,需要较大尺度的设备和船舶,但由于船舶的尺度、吃水问题,船舶难以测量某些水域(比如礁石区域),而且在水域环境复杂地区,传统载人船有时很难找到合适的下水点,在作业过程中容易发生危险,无法保证人员安全。因此,采用无人测量船对水下地形进行测绘,现有的无人测量船多采用的是单波束测深仪和换能器搭配的方式通过发射超声波方式进行深度测量,但受到水体浊度、水草以及悬浮固体垃圾等干扰,影响测量精度。
技术实现要素:
4.本实用新型的目的是提供一种水下地形测量设备,以解决上述现有技术存在的问题,使水下地形测量精度高。
5.为实现上述目的,本实用新型提供了如下方案:
6.本实用新型提供一种水下地形测量设备,包括船体、声呐回波装置和触底测深装置,所述船体上设置有用于驱动所述船体移动的驱动装置,所述声呐回波装置设置在所述船体上且所述声呐回波装置能够发射声波并接收声波实现深度测量,所述触底测深装置一端设置在所述船体上且另一端能够保持与水下地形接触的状态通过紧贴水下地形的方式实现对深度的测量。
7.优选的,所述声呐回波装置包括单波束测深仪和多波束测深仪,所述单波束测深仪和所述多波束测深仪均固定设置在所述船体上。
8.优选的,还包括第一控制装置,所述第一控制装置与所述驱动装置、所述声呐回波装置及所述触底测深装置均通信连接,所述第一控制装置能够通过控制所述驱动装置实现对所述船体位置的移动,且所述声呐回波装置及所述触底测深装置能够将测量数据传输至所述第一控制装置。
9.优选的,还包括第二控制装置,所述第二控制装置能够与所述第一控制装置无线通信连接,且人员能够通过所述第二控制装置实现对所述船体位置的移动,且所述第一控制装置能够将接收的所述声呐回波装置及所述触底测深装置的数据传输至所述第二控制装置。
10.优选的,所述触底测深装置包括连接杆、第一角度传感器和触底探头,所述连接杆一端与所述船体底部转动连接,所述第一角度传感器设置在所述连接杆与所述船体连接处且所述第一角度传感器用于测量所述连接杆与水平面的夹角,所述触底探头能够保持与水
下地形接触的状态,所述触底探头及所述第一角度传感器均与所述第一控制装置通信连接。
11.优选的,所述连接杆为伸缩杆,且所述连接杆与所述触底探头能够拆卸连接。
12.优选的,所述单波束测深仪包括测深仪、换能器和定位装置,所述测深仪固定设置在所述船体的船舱内,所述换能器固定设置在所述船体外底部,所述定位装置固定设置在所述船体上,所述测深仪与所述换能器及所述定位装置分别通信连接,所述定位装置用于高程定位,所述换能器用于接收及发射超声波。
13.优选的,还包括固定杆,所述船体两侧均固定设置有护栏,所述固定杆固定设置在一侧的所述护栏上,所述定位装置固定设置在所述固定杆上。
14.优选的,还包括支撑架,所述支撑架一端与所述固定杆固定连接,且所述支撑架的另一端与所述护栏固定连接。
15.优选的,所述固定杆上还设置有第二角度传感器,所述第二角度传感器能够测量所述固定杆与竖直面之间的角度。
16.本实用新型相对于现有技术取得了以下技术效果:
17.本实用新型提供的水下地形测量设备,通过设置触底测深装置,其能够保持与水下地形接触的状态,从而保证其测量过程不受水中物的影响,且搭配声呐回波装置利用声波进行深度测量,两种测量方式相互验证,使得水下地形测量精度高。
18.进一步的,声呐回波装置采用单波束测深仪和多波束测深仪两种方式进行测量,其并列的两种声波测量方式能够相辅相成,共同核验测量数据的准确性。
19.进一步的,第一控制装置能够实现对驱动装置的控制,以及测深数据的收集整理,使得数据处理更简单方便。
20.进一步的,人员能够通过第二控制装置控制其船体移动位置以及测深数据的接收,当人员需要对船体的移动位置进行干预时,其操作简单,方便。
21.进一步的,触底测深装置采用连接杆和第一角度传感器的方式,通过杆长及角度的数据计算出测量点的深度,且触底探头保持与水下地形的接触,使其触底测深数据更准确可靠。
22.进一步的,连接杆采用伸缩杆,且连接杆与触底探头为能够拆卸连接的方式,使得连接杆的收放运输更简单,且触底探头的可拆卸方式能够保证运输过程,触底探头不被损坏。
23.进一步的,单波束测深仪采用测深仪与换能器还有定位装置共同测量,通过定位装置实现高程定位,并通过测深仪与换能器的测量,共同实现对水下地形坐标点的准确定位。
24.进一步的,采用固定杆将定位装置固定,其结构简单且易制作。
25.进一步的,支撑架的设置能够保证固定杆稳定固定在护栏上,保证其稳定性。
26.进一步的,第二角度传感器能够测量固定杆与竖直面之间的夹角,方便人员调整固定杆至竖直状态,从而保证其定位装置所显示的定位数据更精准,不会因固定杆的歪斜而产生数据偏差。
附图说明
27.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
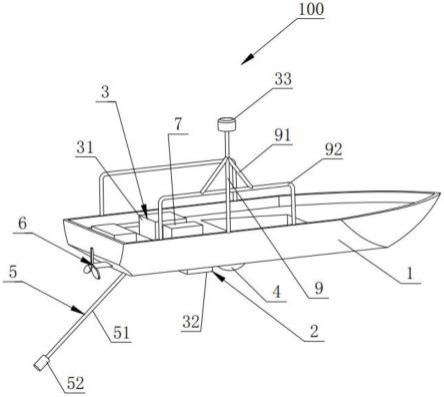
28.图1为本实用新型提供的水下地形测量设备中除第二控制装置的整体结构示意图;
29.图2为本实用新型提供的水下地形测量设备中第二控制装置的整体结构示意图。
30.图中:100-水下地形测量设备;1-船体;2-声呐回波装置;3-单波束测深仪;31-测深仪;32-换能器;33-定位装置;4-多波束测深仪;5-触底测深装置;51-连接杆;52-触底探头;6-驱动装置;7-第一控制装置;8-第二控制装置;81-控制台;82-主控计算机;83-无线通讯天线;9-固定杆;91-支撑架;92-护栏。
具体实施方式
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.本实用新型的目的是提供一种水下地形测量设备,以解决现有技术存在的问题,使水下地形测量精度高。
33.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
34.实施例一
35.本实施例提供一种水下地形测量设备100,如图1所示,包括船体1、声呐回波装置2和触底测深装置5,船体1上设置有用于驱动船体1移动的驱动装置6,声呐回波装置2设置在船体1上且声呐回波装置2能够发射声波并接收声波实现深度测量,具体的,深度测量为水下高程测量,即水下地形各位置与设定基准面的距离,触底测深装置5一端设置在船体1上且另一端能够保持与水下地形接触的状态通过紧贴水下地形的方式实现对深度的测量。通过设置触底测深装置5,其能够保持与水下地形接触的状态,从而保证其测量过程不受水中物的影响,且搭配声呐回波装置2利用声波进行深度测量,两种测量方式相互验证,使得水下地形测量精度高。
36.在本实施例可选方案中,触底测深装置5可以为连接杆51和触底探头52,连接杆51保持垂直状态,连接杆51一端与船体1底部固定连接,且另一端与触底探头52固定连接,此时连接杆51为弹性伸缩杆,且连接杆51上设置有用于测量连接杆51实时长度数据的传感器,随着船体1的移动以及水下地形的高低变化,触底探头52保持与水下地形的接触状态,连接杆51的长度随着水下地形的高低变化而变化,此时连接杆51的不同长度加上连接杆51上部与水面的长度即为水深数据。触底测深装置5也可以为包括连接杆51、第一角度传感器和触底探头52,连接杆51一端与船体1底部转动连接,且第一角度传感器设置在连接杆51与船体1转动连接处并用于测量连接杆51与水平面的夹角,此时连接杆51设置为固定长度的
杆体,触底探头52保持与水下地形的接触状态,根据连接杆51长度以及第一角度传感器测量的角度数据并加上连接杆51上部距水面的高度即可计算出测量点的深度。
37.具体的,驱动装置6包括螺旋桨推进器和螺旋桨推进器控制装置,螺旋桨推进器设置在船体1尾部用于驱动船体1移动,螺旋桨推进器控制装置与螺旋桨推进器通信连接且螺旋桨推进器控制装置用于控制螺旋桨推进器的工作与停止,且船体1上还可以设置用于采集风向风速信息的风向风速传感器和船体1姿态信息的船体1姿态传感器,风向风速传感器及船体1姿态传感器均与螺旋桨推进器控制装置通信连接,螺旋桨推进器控制装置能够根据风向风速信息及船体1姿态信息实现对螺旋桨推进器的推力大小的调整及推进方向的调整等,使船体1更精确的与设计路线稳定航行,具体的,船体1姿态传感器可以集成在多波束测深仪4中。
38.具体的,船体1上的驱动装置6可以设置为智能自动无人行驶,此时无需岸上人员进行操控,也可以设置为由岸上人员通过遥控装置实现对驱动装置6的控制,即通过第二控制装置8对驱动装置6的控制。
39.本实施例的可选方案中,较为优选的,如图1所示,声呐回波装置2包括单波束测深仪3和多波束测深仪4,单波束测深仪3和多波束测深仪4均固定设置在船体1上,单波束测深仪3能够以线状测量方式对测量区域进行测量,多波束测深仪4能够以条带测量方式对测量区域进行全覆盖、高精度测量。声呐回波装置2采用单波束测深仪3和多波束测深仪4两种方式进行测量,其并列的两种声波测量方式能够相辅相成,共同核验测量数据的准确性。
40.本实施例的可选方案中,较为优选的,如图1所示,水下地形测量设备100还包括第一控制装置7,第一控制装置7与驱动装置6、声呐回波装置2及触底测深装置5均通信连接,第一控制装置7能够通过控制驱动装置6实现对船体1位置的移动,且声呐回波装置2及触底测深装置5能够将测量数据传输至第一控制装置7,具体的,第一控制装置7能够接收船体1上设置的所有测量数据,包括但不局限于声呐回波装置2和触底测深装置5的测量数据、第一角度传感器和第二角度传感器的数据。第一控制装置7能够实现对驱动装置6的控制,以及测深数据的收集整理,使得数据处理更简单方便。
41.本实施例的可选方案中,较为优选的,如图2所示,水下地形测量设备100还包括第二控制装置8,第二控制装置8能够与第一控制装置7无线通信连接,且人员能够通过第二控制装置8实现对船体1位置的移动,且第一控制装置7能够将接收的声呐回波装置2及触底测深装置5的数据传输至第二控制装置8。人员能够通过第二控制装置8控制其船体1移动位置以及测深数据的接收,当人员需要对船体1的移动位置进行干预时,其操作简单,方便。
42.具体的,第二控制装置8包括控制台81和主控计算机82,主控计算机82与控制台81通信连接,控制台81上设置有无线通讯天线83且控制台81能够通过无线通讯天线83与船体1上的第一控制装置7无线通信连接,操作人员能够通过主控计算机82实现对船体1的移动以及测深数据的查看及输出,具体的,主控计算机82能够接收船体1上设置的所有相关设备的测量数据,包括但不局限于测深数据。
43.本实施例的可选方案中,较为优选的,如图1所示,触底测深装置5包括连接杆51、第一角度传感器和触底探头52,连接杆51一端与船体1底部转动连接,具体的,连接杆51与船体1对称面底部后尾部转动连接,第一角度传感器设置在连接杆51与船体1连接处且第一角度传感器用于测量连接杆51与水平面的夹角,触底探头52重量大且能够保持与水下地形
接触的状态,触底探头52及第一角度传感器均与第一控制装置7通信连接,且第一控制装置7能够根据连接杆51长度以及第一角度传感器测量的数据计算出测量点的深度数据。触底测深装置5采用连接杆51和第一角度传感器的方式,通过杆长及角度的数据计算出测量点的深度,且触底探头52保持与水下地形的接触,使其触底测深数据更准确可靠。
44.本实施例的可选方案中,较为优选的,连接杆51为伸缩杆,且连接杆51与触底探头52能够拆卸连接,具体的,连接杆51底部设有外螺纹,触底探头52顶部设有内螺纹筒,连接杆51底部外螺纹与触底探头52顶部的内螺纹筒螺纹连接。连接杆51采用伸缩杆,且连接杆51与触底探头52为能够拆卸连接的方式,使得连接杆51的收放运输更简单,且触底探头52的可拆卸方式能够保证运输过程,触底探头52不被损坏。
45.具体的,触底探头52的横截面尺寸大于连接杆51的横截面尺寸,从而保证触底探头52与水下地形有足够的接触面积,且触底探头52为重量较大的铁构件,能够避免水草等的勾持干扰。
46.本实施例的可选方案中,较为优选的,如图1所示,单波束测深仪3包括测深仪31、换能器32和定位装置33,具体的,定位装置33为gnss rtk接收机,其内置网络通讯模块,用于接收卫星信号进行平面位置定位测量,测深仪31固定设置在船体1的船舱内,换能器32固定设置在船体1外底部,定位装置33固定设置在船体1上,测深仪31与换能器32及定位装置33分别通信连接,定位装置33用于高程定位,换能器32用于接收及发射超声波,具体的,gnss rtk接收机和换能器32的数据传输至测深仪31中,二者的数据转换也在测深仪31中完成,最后导出高程文件,将文件导入相应软件中即可生成等深线图。单波束测深仪3采用测深仪31与换能器32还有定位装置33共同测量,通过定位装置33实现高程定位,并通过测深仪31与换能器32的测量,共同实现对水下地形坐标点的准确定位。
47.本实施例的可选方案中,较为优选的,如图1所示,水下地形测量设备100还包括固定杆9,船体1两侧均固定设置有护栏92,固定杆9固定设置在一侧的护栏92上,定位装置33固定设置在固定杆9上,具体的,固定杆9可以为圆杆也可以为方杆,形状不限,可以根据测量的实际情况而定,且固定杆9也可以设置为空心的。采用固定杆9将定位装置33固定,其结构简单且易制作。
48.本实施例的可选方案中,较为优选的,如图1所示,水下地形测量设备100还包括支撑架91,支撑架91一端与固定杆9固定连接,且支撑架91的另一端与护栏92固定连接,具体的,支撑架91可以采用紧固螺钉的方式与固定杆9及护栏92固定连接,支撑架91也可以采用螺栓螺母的标准件,并配合在支撑架91、固定杆9及护栏92上开设通孔的方式实现固定连接。支撑架91的设置能够保证固定杆9稳定固定在护栏92上,保证其稳定性。
49.本实施例的可选方案中,较为优选的,固定杆9上还设置有第二角度传感器,第二角度传感器能够测量固定杆9与竖直面之间的角度。第二角度传感器能够测量固定杆9与竖直面之间的夹角,方便人员调整固定杆9至竖直状态,从而保证其定位装置33所显示的定位数据更精准,不会因固定杆9的歪斜而产生数据偏差。
50.本实施的可选方案中,在船体1的其他位置也可以根据需要安装其他设备,同时进行多任务的展开。
51.本实用新型中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一
般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1