1.本实用新型涉及污泥检测技术领域,尤其是一种光学法泥层位置测量追踪设备。
背景技术:2.自来水厂尾水的浓缩池工艺运行时,泥水混合液源源不断排入池内,混合液中的污泥由于比重较大逐渐沉淀,最终在池底形成污泥层,上清液溢流排出,池底的污泥则由间歇运行的打泥泵排出,因此池内污泥的泥层始终处于一个动态变化的过程。整个水体垂直剖面,上层为浊度很低的上清液;中层为泥水过渡层,浊度逐渐升高,并可用污泥浓度参数表征;下层为逐渐积聚的污泥层,其污泥浓度逐步升至30g/l左右;池底为较密实的污泥层,其污泥浓度在60g/l左右。
3.及时掌握浓缩池泥层位置和水体剖面的污泥浓度分布情况对工艺调控有着重要意义,目前水厂测量泥层位置通常采用人工观察法,或在浓缩池下部壁板不同高度开孔安装穿墙水管和阀门,通过开启阀门观察水管出水情况判断大致泥层位置;或使用通长的不锈钢薄壁管,在管子的不同高度焊接采样杯,将钢管垂直插到池底再垂直拔出,观察各个采样杯中污泥浓度情况判断大致泥层位置。上述人工观察法不仅耗费人力,无法连续测量,而且精度差,易受人为因素影响。也有水厂采用超声波泥位计测量泥层位置,即超声波遇到泥层反射或衰减变化原理,但是水下情况复杂,遇到水下有污泥悬浮层时仪表会将此误判为泥位,而泥水过渡界面不清晰时仪表测量准确度不佳,水厂也缺乏其它手段验证测量数据的准确性,因此实际应用情况不佳。
技术实现要素:4.本实用新型要解决的技术问题是:克服现有技术中之不足,提供一种光学法泥层位置测量追踪设备。
5.本实用新型解决其技术问题所采用的技术方案是:一种光学法泥层位置测量追踪设备,包括plc控制器、执行机构和污泥浓度计,所述plc控制器与执行机构电连接,所述执行机构设置在一箱体内,所述污泥浓度计置于箱体外,其通过电缆线与执行机构连接,执行机构包括驱动电机以及由驱动电机驱动的电缆线的收放组件,所述收放组件包括集电环和编码器,所述集电环电连接污泥浓度计变送器,所述编码器的转轴上安装有支撑电缆线的滑轮,所述污泥浓度计变送器和编码器均与plc控制器信号连接。
6.plc控制器控制执行机构放电缆线,从而带动污泥浓度计进入水体直至底部污泥层,编码器的输出脉冲数始终与滑轮旋转圈数以及电缆线下降长度有关,由脉冲数可得出传感器实际水深位置;plc根据需要设定污泥浓度阈值,当污泥浓度计下降一定距离连续测得的污泥浓度均大于阈值时,以该段距离零点位置的水深作为泥层位置基准点,水深恒定,只要测得零点位置水深,即可算出泥层位置。
7.进一步地,所述收放组件还包括第一传动轮、绕线盘和导向轮,所述驱动电机的输出轴上安装有第一传动轮,所述第一传动轮通过传动皮带与第二传动轮连接,所述第二传
动轮、集电环和绕线盘共轴设置,电缆线的一端设置在绕线盘上,其另一端依次绕过导向轮、滑轮后连接污泥浓度计。
8.第二传动轮、集电环和绕线盘共轴设置,实现三者同步旋转,电缆线穿过滑轮、导向轮,由绕线盘收纳,电缆线与滑轮、导向轮紧密贴合,电缆线收放时带动滑轮和编码器轴同步旋转。
9.进一步地,所述集电环包括定环和位于定环内的动环,所述动环上具有动环引出线,所述动环引出线连接接线桩,所述接线桩与电缆线的一端连接,所述定环上具有定环引出线,所述定环引出线通过传感器信号线与污泥浓度计变送器连接。
10.电缆线在绕线盘上的收放长度信息由编码器传输给plc控制器、污泥浓度计测得的浓度信息数据由集电环和传感器信号线传输给污泥浓度计变送器,污泥浓度计变送器再反馈给plc控制器。
11.进一步地,所述污泥浓度计变送器嵌设在箱体表面,其具有显示屏。
12.通过显示屏可以直接显示污泥浓度计测得的浓度等数据。
13.进一步地,所述箱体底部设有收纳污泥浓度计的圆筒件。
14.在污泥浓度计不检测时,可以收纳在圆筒件内,起到保护作用。
15.进一步地,所述plc控制器与人机界面通过通信线缆电连接,其信号输出接口通过通信线缆与驱动电机的控制端进行电连接,其信号输入接口与编码器和污泥浓度计变送器电连接,上位机通过通信线缆与plc控制器连接,且其接入局域网。
16.人机界面与plc控制器通过通信线缆连接,输入水池深度,污泥浓度阈值及其它参数,可直观显示水深和污泥浓度变化的两条曲线及测量值;通过局域网在上位机上实时显示泥层位置的测量结果以及水深、污泥浓度历史曲线,便于通过对曲线的平移、放大操作,进行更精细的分析判断。
17.本实用新型的有益效果是:
18.plc根据需要设定污泥浓度阈值,来获得更加精准的泥层位置;
19.可完全替代人工测量,单次测量仅需5分钟左右,不会对泥层产生扰动,测量频率远高于人工,可定时测量或远程启动测量;
20.相较于超声波泥位计,该设备不仅可以测量泥层位置,而且通过人机界面可直观地显示从水面至池底的水深变化曲线以及随水深而变化的污泥浓度曲线,因此人工可以追踪水体垂直剖面泥水的沉降变化情况,并可以根据此两条曲线对泥层位置测量结果进行复核和分析判断;
21.通过局域网在上位机上实时显示泥层位置的测量结果以及水深、污泥浓度历史曲线,便于通过对曲线的平移、放大操作,进行更精细的分析判断;
22.控制、驱动、传动系统结构简单。
附图说明
23.下面结合附图和实施方式对本实用新型进一步说明。
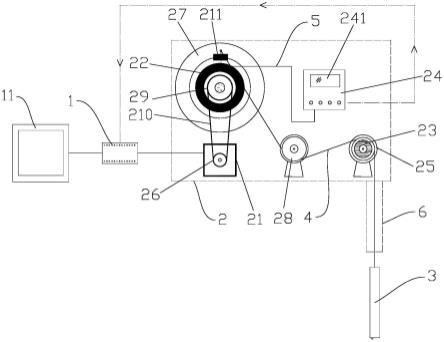
24.图1是本实用新型的结构示意图。
25.图中:1.plc控制器,11.人机界面,2.执行机构,3.污泥浓度计,4.电缆线,5.传感器信号线,6.圆筒件,21.驱动电机,22.集电环,23.编码器,24.污泥浓度计变送器,25.滑
轮,26.第一传动轮,27.绕线盘,28.导向轮,29.第二传动轮,210.传动皮带,221.接线桩,241.显示屏。
具体实施方式
26.现在结合附图对本实用新型作进一步的说明。这些附图均为简化的示意图仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
27.如图1所示,一种光学法泥层位置测量追踪设备,包括plc控制器1、人机界面11、执行机构2和污泥浓度计3(为现有技术,且带有刮刷组件,能自动清洁,免维护),plc控制器1与执行机构2电连接,执行机构2设置在一箱体内,污泥浓度计3置于箱体外,其通过电缆线4与执行机构2连接,箱体底部设有收纳污泥浓度计3的圆筒件6,执行机构2包括驱动电机21以及由驱动电机21驱动的电缆线4的收放组件,收放组件包括集电环22和编码器23,集电环22电连接污泥浓度计变送器24,编码器23的转轴上安装有支撑电缆线4的滑轮25,污泥浓度计变送器24和编码器23均与plc控制器1信号连接,污泥浓度计变送器24向plc控制器1输出4~20ma信号。
28.具体地,收放组件还包括第一传动轮26、绕线盘27和导向轮28,驱动电机21的输出轴上安装有第一传动轮26,第一传动轮26通过传动皮带210与第二传动轮29连接,第二传动轮29、集电环22和绕线盘27共轴设置,电缆线4的一端设置在绕线盘27上,其另一端依次绕过导向轮28、滑轮25后连接污泥浓度计3。
29.集电环22包括定环和位于定环内的动环(定环和动环为现有技术,图中未示出),动环上具有动环引出线,动环引出线连接接线桩221,接线桩221与电缆线4的一端连接,定环上具有定环引出线,定环引出线通过传感器信号线5与污泥浓度计变送器24连接。污泥浓度计变送器24嵌设在箱体表面,其具有显示屏241。
30.由于浓缩池上清液污泥浓度极低(低于200mg/l),而污泥浓度计3的光学感应部分一旦离开水暴露在空气中,其测量值会突变到4000mg/l左右,因此利用该特性可以快速判断传感器是否完全离开水面。
31.当设备待机时,plc控制器1控制绕线盘27收电缆线4,将污泥浓度计3拉升至水面上20cm处。当启动测量后,plc控制器1控制绕线盘27放电缆线4,污泥浓度计3以1cm/s左右的速度入水,当污泥浓度低于300mg/l时,可判断污泥浓度计3已入水,此时plc控制器1开始对编码器23的高速脉冲数进行累加(因为与编码器23同轴的滑轮25半径已知,因此不论滑轮25转速是否匀速,编码器23的输出脉冲数始终与滑轮25旋转圈数以及电缆线4下降长度有着确切的对应关系,由脉冲数可得出传感器实际水深位置);污泥浓度计3入水后,因为池子上层为上清液,污泥浓度极低,为缩短测量时间,此时污泥浓度计3可以较快的速度下降直至进入泥水过渡层,此时污泥浓度明显上升,由300mg/l升至1000mg/l,为防止污泥浓度计3下降速度过快扰动泥层,污泥浓度计3下降速度降低至2cm/s左右。
32.测量泥层位置:plc控制器1根据用户设定的污泥浓度阈值,当污泥浓度计3下降一定距离连续测得的污泥浓度均大于阈值时,以该段距离零点位置的水深作为泥层位置基准点,因为浓缩池运行时水深是恒定的,只要测得零点位置水深,即可算出泥层位置;
33.随后,污泥浓度计3继续以2cm/s左右的速度下降至池底,获取积聚的污泥层的浓度数据,此时测量结束。
34.测量结束后,plc控制器1控制绕线盘27收电缆线,污泥浓度计3快速上升,编码器23反转,plc控制器1对编码器23的高速脉冲数进行累减,直至归零时,污泥浓度计3正位于气水交界面,接着,plc控制器1控制绕线盘低速将污泥浓度计3拉升至水面上20cm处,回到设备待机状态。
35.人机界面11的历史趋势页面每隔1s采集显示一次污泥浓度和传感器位置水深,形成曲线,从而直观地展示污泥浓度随水深变化而变化的情况,人工可在现场据此验证测量数据的可靠性。
36.另外,plc控制器1与人机界面11通过通信线缆电连接,其信号输出接口通过通信线缆与驱动电机21的控制端进行电连接,其信号输入接口与编码器23和污泥浓度计变送器24电连接,上位机通过通信线缆与plc控制器1连接,且其接入局域网。通过局域网在上位机上实时显示泥层位置的测量结果以及水深、污泥浓度历史曲线,便于通过对曲线的平移、放大操作,进行更精细的分析判断。
37.上述实施方式只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并加以实施,并不能以此限制本实用新型的保护范围,凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围内。