一种自动检测零件平台的制作方法
1.本实用新型属于检测设备领域,特别涉及一种自动检测零件平台。
背景技术:
2.目前,市面上对于零件的形位尺寸进行检测的方式,主要是采用多名检查人员白夜班进行生产检查,使用检具、卡尺、塞尺、钢板尺、千分尺等测量工作,人工手动操作完成。因此,存在自动化程度低,作业人员工作强度大;且零件品种多,投入检查人员多;产品尺寸代用检具检查,作业人员的熟练程度直接影响品质测量结果和效率。其中,考虑到汽车零部件复杂,测量工具有测量特征复杂多样性、局部曲面细节要求高,现有的测量手段(尺寸代用检具检查)已无法满足测量精度高、测量效率快、测量流程全面等特点的测量需求。存在产品测量数据录入烦琐,现场无法及时得出统计分析结果;检测零件的形位尺寸多,检查速度慢,时间长,效率低;对操作人员技能依赖度比较高,容易出现测错,判错;测量数据需要再进行统计分析,时间长,效率低;反馈问题不够及时和数据准确性不高;并且1个产品至少对应一个检具(部分产品涉及多个分件检具和总成检具),检测成本高。
技术实现要素:
3.鉴于上述问题,本实用新型的目的在于提供一种测量效率快且精度高,及成本低的自动检测零件平台。
4.为实现上述目的,本实用新型提供的一种自动检测零件平台,其中,包括机械手、在机械手的端部上设有的激光扫描头、在激光扫描头两侧分别设有的第一伺服夹具装置和第二伺服夹具装置、在第一伺服夹具装置和第二伺服夹具装置上均分别设有的第一测量产品和第二测量产品、在激光扫描头的前方位置设有配合激光扫描头对第一测量产品和第二测量产品进行扫描的激光扫描设备跟踪仪,及在激光扫描头一侧设有与激光扫描头连接的显示装置。
5.在一些实施方式中,第一伺服夹具装置包括在激光扫描头一侧设有的第一伺服结构、在第一伺服结构同一直线端部位置设有的第二伺服结构、在第一伺服结构一侧设有与第一伺服结构平行的第一配合夹具结构,及在第一配合夹具的同一直线端部位置设有与第二伺服结构平行的第二配合夹具结构。
6.第一伺服结构包括在激光扫描头一侧设有的第一水平滑槽、在第一水平滑槽上设有的第一水平引导块、在第一水平引导块上设有的第一水平滑块、在第一水平滑槽一侧上设有驱动第一水平滑块沿第一水平引导块滑行的第一平推气缸、在第一水平滑块上设有的第一竖直滑槽、在第一竖直滑槽上设有的第一竖直引导块、在第一竖直引导块上设有的第一竖直滑块、在第一竖直滑槽上设有与第一滑块连接的第一竖直气缸、在第一竖直引导块上设有的第一托架,及在第一托架上设有的第一夹块。
7.第二伺服结构包括在第一水平滑槽一侧上设有与第一水平滑槽对接的第二水平滑槽、在第二水平滑槽上设有的第二水平引导块、在第二水平引导块上设有的第二水平滑
块、在第二水平滑槽一侧上设有驱动第二水平滑块沿第二水平引导块滑行的第二平推气缸、在第二水平滑块上设有的第二竖直滑槽、在第二竖直滑槽上设有的第二竖直引导块、在第二竖直引导块上设有的第二竖直滑块、在第二竖直滑槽上设有与第二竖直滑块连接的第二竖直气缸、在第二竖直引导块上设有的第二托架,及在第二托架上设有的第二夹块。
8.第一配合夹具结构包括在第一水平滑槽一侧设有与第一水平滑槽平行的第三水平滑槽、在第三水平滑槽上设有的第三水平引导块、在第三水平引导块上设有的第三水平滑块、在第三水平滑槽一侧上设有驱动第三水平滑块沿第三水平引导块滑行的第三平推气缸、在第三水平滑块上设有垂直第一水平滑槽的第四水平滑槽、在第四水平滑槽上设有的第四水平引导块、在第四水平引导块上设有的第四水平滑块、在第四水平滑槽一侧上设有驱动第四水平滑块沿第四水平引导块滑行的第四平推气缸、在第四水平滑块上设有的第三竖直滑槽、在第三竖直滑槽上设有的第三竖直引导块、在第三竖直引导块上设有的第三竖直滑块、在第三竖直滑槽上设有与第三滑块连接的第三竖直气缸、在第三竖直引导块上设有的第三托架,及在第三托架上设有的第三夹块。
9.第二配合夹具结构包括在第一水平滑槽一侧设有与第一水平滑槽平行的第五水平滑槽、在第五水平滑槽上设有的第五水平引导块、在第五水平引导块上设有的第五水平滑块、在第五水平滑槽一侧上设有驱动第五水平滑块沿第五水平引导块滑行的第五平推气缸、在第五水平滑块上设有垂直第一水平滑槽的第六水平滑槽、在第六水平滑槽上设有的第六水平引导块、在第六水平引导块上设有的第六水平滑块、在第六水平滑槽一侧上设有驱动第六水平滑块沿第六水平引导块滑行的第六平推气缸、在第六水平滑块上设有的第四竖直滑槽、在第四竖直滑槽上设有的第四竖直引导块、在第四竖直引导块上设有的第四竖直滑块、在第四竖直滑槽上设有与第四滑块连接的第四竖直气缸、在第四竖直引导块上设有的第四托架,及在第四托架上设有的第四夹块。
10.第一夹块、第二夹块、第三夹块和第四夹块相互配合夹持第一测量产品。
11.在一些实施方式中,第二伺服夹具装置包括在激光扫描头一侧设有的第三伺服结构、在第三伺服结构同一直线端部位置设有的第四伺服结构,及在第三伺服结构一侧设有与第三伺服结构平行的第三配合夹具结构。
12.第三伺服结构包括在激光扫描头一侧设有的第七水平滑槽、在第七水平滑槽上设有的第七水平引导块、在第七水平引导块上设有的第七水平滑块、在第七水平滑槽一侧上设有驱动第七水平滑块沿第七水平引导块滑行的第七平推气缸、在第七水平滑块上设有的第五竖直滑槽、在第五竖直滑槽上设有的第五竖直引导块、在第五竖直引导块上设有的第五竖直滑块、在第五竖直滑槽上设有与第五滑块连接的第五竖直气缸、在第五竖直引导块上设有的第五托架,及在第五托架上设有的第五夹块。
13.第四伺服结构包括在第七水平滑槽一侧上设有与第七水平滑槽对接的第八水平滑槽、在第八水平滑槽上设有的第八水平引导块、在第八水平引导块上设有的第八水平滑块、在第八水平滑槽一侧上设有驱动第八水平滑块沿第八水平引导块滑行的第八平推气缸、在第八水平滑块上设有的第六竖直滑槽、在第六竖直滑槽上设有的第六竖直引导块、在第六竖直引导块上设有的第六竖直滑块、在第六竖直滑槽上设有与第六滑块连接的第六竖直气缸、在第六竖直引导块上设有的第六托架,及在第六托架上设有的第六夹块。
14.第三配合夹具结构包括在第八水平滑槽一侧设有与第八水平滑槽平行的第九水
平滑槽、在第九水平滑槽上设有的第九水平引导块、在第九水平引导块上设有的第九水平滑块、在第九水平滑槽一侧上设有驱动第九水平滑块沿第九水平引导块滑行的第九平推气缸、在第九水平滑块上设有垂直第一水平滑槽的第十水平滑槽、在第十水平滑槽上设有的第十水平引导块、在第十水平引导块上设有的第十水平滑块、在第十水平滑槽一侧上设有驱动第十水平滑块沿第十水平引导块滑行的第十平推气缸、在第十水平滑块上设有的第七竖直滑槽、在第七竖直滑槽上设有的第七竖直引导块、在第七竖直引导块上设有的第七竖直滑块、在第七竖直滑槽上设有与第七滑块连接的第七竖直气缸、在第七竖直引导块上设有的第七托架,及在第七托架上设有的第七夹块。
15.第五夹块、第六夹块和第七夹块相互配合夹持第二测量产品。
16.在一些实施方式中,第一伺服夹具装置和第二伺服夹具装置一侧均分别设置有安全光栅感应器和控制器。
17.在一些实施方式中,激光扫描设备跟踪仪包括在激光扫描头的前方位置设有的龙门支架、在龙门支架顶上设有的移动式伺服结构,及在龙门支架的支撑脚上设有的橡胶减振垫脚架。由此,运用铝合金材料设计轻便的激光扫描设备跟踪仪,采用框架结构连接,减少了铝合金支架的晃动,既美观、轻便、又减少工作站的占用面积。对激光扫描设备跟踪仪的稳定性做了减振设计,采用橡胶垫片及螺丝固定,减少了跟踪仪的晃动。
18.在一些实施方式中,移动式伺服结构包括在龙门支架上设有的导轨、在导轨上设有的倒挂架和在龙门支架上设有驱动倒挂架在导轨上滑行的伺服电机,及在倒挂架上设有的激光跟踪仪。
19.激光跟踪仪与激光扫描头连接。
20.在一些实施方式中,导轨长度为2米。由此,激光扫描设备跟踪仪可以伺服进行移动,导轨长度达到2米,覆盖了工作站的所有数据连接和传输。
21.在一些实施方式中,显示装置包括在激光扫描头后方设有的显示屏,及在激光扫描头前方设有的电脑。由此,显示屏显示结果与电脑同步显示。
22.本实用新型的有益效果是具有测量效率快且精度高,及成本低的效果。使用时,操作人员选定程序后,第一伺服夹具装置和/或第二伺服夹具装置自动打开,放入零件后,按下启动按钮,激光扫描头会根据选定的程序自动进行扫描,将自动出测量结果,在激光跟踪仪打光配合作用下显示屏显示结果与电脑同步显示,经检查员确认一下数据是否合格。如此,解决劳动强度大,检测对操作人员技能依赖度比较高,容易出现测错,判错的缺点。另外,通过自动测量只需要2名测量员即可(原来1个产品至少对应一个检具,多名检测员循环进行测量,现场共计配置测量员11人,变为白夜班各1名),大幅降低人员和检具的投入。实现了,测量效率快且精度高,及成本低的效果。
附图说明
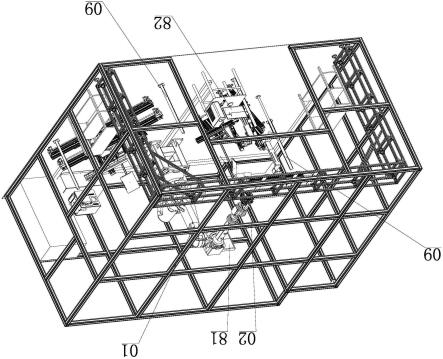
23.图1为本实用新型的结构示意图;
24.图2为本实用新型另一视的结构示意图;
25.图3为本实用新型的内部结构示意图;
26.图4为图1中第一伺服夹具装置的结构示意图;
27.图5为图4另一视角的结构示意图;
28.图6为图1中第二伺服夹具装置的结构示意图;
29.图7为图6另一视角的结构示意图;
30.图8为图1中激光扫描设备跟踪仪的结构示意图;
31.图9为图8中激光扫描设备跟踪仪另一视角的结构示意图。
具体实施方式
32.下面结合附图对实用新型作进一步详细的说明。
33.如图1-9所示,一种自动检测零件平台,包括机械手01、在机械手 01的端部上设有的激光扫描头02、在激光扫描头02两侧分别设有的第一伺服夹具装置03和第二伺服夹具装置04、在第一伺服夹具装置03和第二伺服夹具装置04上均分别设有的第一测量产品05和第二测量产品06、在激光扫描头02的前方位置设有配合激光扫描头02对第一测量产品05和第二测量产品06进行扫描的激光扫描设备跟踪仪07,及在激光扫描头02 一侧设有与激光扫描头02连接的显示装置08。
34.第一伺服夹具装置03包括在激光扫描头02一侧设有的第一伺服结构 31、在第一伺服结构31同一直线端部位置设有的第二伺服结构32、在第一伺服结构31一侧设有与第一伺服结构31平行的第一配合夹具结构33,及在第一配合夹具的同一直线端部位置设有与第二伺服结构32平行的第二配合夹具结构34。
35.第一伺服结构31包括在激光扫描头02一侧设有的第一水平滑槽311、在第一水平滑槽311上设有的第一水平引导块312、在第一水平引导块312 上设有的第一水平滑块313、在第一水平滑槽311一侧上设有驱动第一水平滑块313沿第一水平引导块312滑行的第一平推气缸314、在第一水平滑块313上设有的第一竖直滑槽315、在第一竖直滑槽315上设有的第一竖直引导块316、在第一竖直引导块316上设有的第一竖直滑块317、在第一竖直滑槽315上设有与第一滑块连接的第一竖直气缸318、在第一竖直引导块316上设有的第一托架319,及在第一托架319上设有的第一夹块3110。
36.第二伺服结构32包括在第一水平滑槽311一侧上设有与第一水平滑槽311对接的第二水平滑槽321、在第二水平滑槽321上设有的第二水平引导块322、在第二水平引导块322上设有的第二水平滑块323、在第二水平滑槽321一侧上设有驱动第二水平滑块323沿第二水平引导块322滑行的第二平推气缸324、在第二水平滑块323上设有的第二竖直滑槽325、在第二竖直滑槽325上设有的第二竖直引导块326、在第二竖直引导块326 上设有的第二竖直滑块327、在第二竖直滑槽325上设有与第二竖直滑块327连接的第二竖直气缸328、在第二竖直引导块326上设有的第二托架 329,及在第二托架329上设有的第二夹块3210。
37.第一配合夹具结构33包括在第一水平滑槽311一侧设有与第一水平滑槽311平行的第三水平滑槽331、在第三水平滑槽331上设有的第三水平引导块332、在第三水平引导块332上设有的第三水平滑块333、在第三水平滑槽331一侧上设有驱动第三水平滑块333沿第三水平引导块332 滑行的第三平推气缸334、在第三水平滑块333上设有垂直第一水平滑槽 311的第四水平滑槽335、在第四水平滑槽335上设有的第四水平引导块 336、在第四水平引导块336上设有的第四水平滑块337、在第四水平滑槽 335一侧上设有驱动第四水平滑块337沿第四水平引导块336滑行的第四平推气缸338、在第四水平滑块337上设有的第三竖直滑槽339、在第三竖直滑槽339上设有的第三竖直引导块3310、在第三竖直引导块3310上设
有的第三竖直滑块3311、在第三竖直滑槽339上设有与第三滑块连接的第三竖直气缸3312、在第三竖直引导块3310上设有的第三托架,及在第三托架上设有的第三夹块。
38.第二配合夹具结构34包括在第一水平滑槽311一侧设有与第一水平滑槽311平行的第五水平滑槽341、在第五水平滑槽341上设有的第五水平引导块342、在第五水平引导块342上设有的第五水平滑块343、在第五水平滑槽341一侧上设有驱动第五水平滑块343沿第五水平引导块342 滑行的第五平推气缸344、在第五水平滑块343上设有垂直第一水平滑槽 311的第六水平滑槽345、在第六水平滑槽345上设有的第六水平引导块 346、在第六水平引导块346上设有的第六水平滑块347、在第六水平滑槽 345一侧上设有驱动第六水平滑块347沿第六水平引导块346滑行的第六平推气缸348、在第六水平滑块347上设有的第四竖直滑槽349、在第四竖直滑槽349上设有的第四竖直引导块3410、在第四竖直引导块3410上设有的第四竖直滑块3411、在第四竖直滑槽349上设有与第四滑块连接的第四竖直气缸3412、在第四竖直引导块3410上设有的第四托架,及在第四托架上设有的第四夹块。
39.第一夹块3110、第二夹块3210、第三夹块和第四夹块相互配合夹持第一测量产品05。
40.第二伺服夹具装置04包括在激光扫描头02一侧设有的第三伺服结构 41、在第三伺服结构41同一直线端部位置设有的第四伺服结构42,及在第三伺服结构41一侧设有与第三伺服结构41平行的第三配合夹具结构 43。
41.第三伺服结构41包括在激光扫描头02一侧设有的第七水平滑槽411、在第七水平滑槽411上设有的第七水平引导块412、在第七水平引导块412 上设有的第七水平滑块413、在第七水平滑槽411一侧上设有驱动第七水平滑块413沿第七水平引导块412滑行的第七平推气缸414、在第七水平滑块413上设有的第五竖直滑槽415、在第五竖直滑槽415上设有的第五竖直引导块416、在第五竖直引导块416上设有的第五竖直滑块417、在第五竖直滑槽415上设有与第五滑块连接的第五竖直气缸418、在第五竖直引导块416上设有的第五托架419,及在第五托架419上设有的第五夹块4110。
42.第四伺服结构42包括在第七水平滑槽411一侧上设有与第七水平滑槽411对接的第八水平滑槽421、在第八水平滑槽421上设有的第八水平引导块422、在第八水平引导块422上设有的第八水平滑块423、在第八水平滑槽421一侧上设有驱动第八水平滑块423沿第八水平引导块422滑行的第八平推气缸424、在第八水平滑块423上设有的第六竖直滑槽425、在第六竖直滑槽425上设有的第六竖直引导块426、在第六竖直引导块426 上设有的第六竖直滑块427、在第六竖直滑槽425上设有与第六滑块连接的第六竖直气缸428、在第六竖直引导块426上设有的第六托架429,及在第六托架429上设有的第六夹块4210。
43.第三配合夹具结构43包括在第八水平滑槽421一侧设有与第八水平滑槽421平行的第九水平滑槽431、在第九水平滑槽431上设有的第九水平引导块432、在第九水平引导块432上设有的第九水平滑块433、在第九水平滑槽431一侧上设有驱动第九水平滑块433沿第九水平引导块432 滑行的第九平推气缸434、在第九水平滑块433上设有垂直第一水平滑槽 311的第十水平滑槽435、在第十水平滑槽435上设有的第十水平引导块436、在第十水平引导块436上设有的第十水平滑块437、在第十水平滑槽 435一侧上设有驱动第十水平滑块437沿第十水平引导块436滑行的第十平推气缸438、在第十水平滑块437上设有的第七竖直滑槽439、在第七竖直滑槽439上设有的第七竖直引导块4310、在第七竖直引导块4310上设
有的第七竖直滑块4311、在第七竖直滑槽439上设有与第七滑块连接的第七竖直气缸4312、在第七竖直引导块4310上设有的第七托架,及在第七托架上设有的第七夹块。
44.第五夹块4110、第六夹块4210和第七夹块相互配合夹持第二测量产品06。
45.第一伺服夹具装置03和第二伺服夹具装置04一侧均分别设置有安全光栅感应器09和控制器10。
46.激光扫描设备跟踪仪07包括在激光扫描头02的前方位置设有的龙门支架71、在龙门支架71顶上设有的移动式伺服结构72,及在龙门支架71 的支撑脚上设有的橡胶减振垫脚架73。运用铝合金材料设计轻便的激光扫描设备跟踪仪07,采用框架结构连接,减少了铝合金支架的晃动,既美观、轻便、又减少工作站的占用面积。对激光扫描设备跟踪仪07的稳定性做了减振设计,采用橡胶垫片及螺丝固定,减少了跟踪仪的晃动。
47.移动式伺服结构72包括在龙门支架71上设有的导轨721、在导轨721 上设有的倒挂架722和在龙门支架71上设有驱动倒挂架在导轨721上滑行的伺服电机,及在倒挂架上设有的激光跟踪仪。
48.激光跟踪仪与激光扫描头02连接。
49.导轨721长度为2米。激光扫描设备跟踪仪07可以伺服进行移动,导轨721长度达到2米,覆盖了工作站的所有数据连接和传输。
50.显示装置08包括在激光扫描头02后方设有的显示屏81,及在激光扫描头02前方设有的电脑82。显示屏81显示结果与电脑82同步显示。
51.使用时,操作人员选定程序后,第一伺服夹具装置03和/或第二伺服夹具装置04自动打开,放入零件后,按下启动按钮,激光扫描头02会根据选定的程序自动进行扫描,将自动出测量结果,在激光跟踪仪打光配合作用下显示屏81显示结果与电脑82同步显示,经检查员确认一下数据是否合格。如此,解决劳动强度大,检测对操作人员技能依赖度比较高,容易出现测错,判错的缺点。另外,通过自动测量只需要2名测量员即可(原来1个产品至少对应一个检具,多名检测员循环进行测量,现场共计配置测量员11人,变为白夜班各1名),大幅降低人员和检具的投入。
52.以上所述的仅是本实用新型的一些实施方式。对于本领域的普通技术人员来说,在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1