一种海上船舶惯导产品海上试验装置的制作方法
1.本实用新型涉及惯导产品试验装置技术领域,特别涉及一种海上船舶惯导产品海上试验装置。
背景技术:
2.海上船舶惯导产品为海上船舶提供实时的包括经度、纬度、速度和姿态在内的导航信息,是海上船舶能在大海中正常航行的重要设备。在海上船舶惯导产品正式装备于海上船舶使用前,需要对其进行海上试验验证导航精度。但是,现有海上船舶惯导产品海上试验系统存在如下缺陷:
3.(1)没有配备完备的基准设备以提供全面的基准信息;
4.(2)电源稳定性差,在供电事故(外部供电中断)时不能正常工作;
5.(3)无法抵抗海上船舶受海风、海浪和洋流等复杂环境的影响。
技术实现要素:
6.鉴于现有技术的不足,本实用新型的目的在于提供一种海上船舶惯导产品海上试验装置,该试验装置配备完备的基准设备以提供全面的基准信息,具有可靠的电源稳定性,在供电事故(外部供电中断)时仍能正常工作,并且能抵抗海上船舶受海风、海浪和洋流等复杂环境的影响,具有较强的实用性。
7.为实现上述目的,本实用新型采用如下技术方案:一种海上船舶惯导产品海上试验装置,包括机柜、显控机箱、ups机箱、高精度惯导设备、第一gps天线、第二gps天线和计程仪传感器,所述机柜和ups机箱的底部分别通过钢丝绳减震器安装于安装板上,所述高精度惯导设备的底部安装于安装板上,所述安装板安装于船舱内的甲板上,所述安装板还用于安装被测惯导产品,所述机柜和显控机箱的背部分别通过钢丝绳减震器安装于船舱舱壁上,所述第一gps天线和第二gps天线安装于船顶,所述计程仪传感器安装于船底。
8.优选地,所述机柜中从上往下依次安装有机柜内设备状态监控灯面板、同步信号装置、差分gps信号接收机、计程仪信号接收机、工控机和磁盘阵列,所述同步信号装置分别与高精度惯导设备、计程仪信号接收机、差分gps信号接收机电性连接,所述差分gps信号接收机分别与第一gps天线、第二gps天线分别通信连接,所述计程仪信号接收机与计程仪传感器通信连接,所述高精度惯性导航设备、计程仪信号接收机、差分gps信号接收机、触摸式显示屏、磁盘阵列分别与工控机电性连接,所述同步信号装置和工控机还分别用于电性连接被测惯导产品。
9.优选地,所述机柜内设备状态监控灯面板上从左往右依次设置有同步信号装置状态监控灯、差分gps信号接收机状态监控灯、计程仪信号接收机状态监控灯、工控机状态监控灯和磁盘阵列监控灯。
10.优选地,所述显控机箱中安装有显控,所述显控用于显示被测惯导产品、高精度惯导设备、差分gps信号接收机、计程仪信号接收机、工控机的工作状态及给被测惯导产品、高
精度惯导设备、差分gps信号接收机、计程仪信号接收机、工控机发出控制命令。
11.优选地,所述ups机箱内安装有ups,所述ups输出220v交流电给磁盘阵列、工控机、计程仪信号接收机、显控,所述ups输出+24v直流电给差分gps信号接收机、同步信号装置、高精度惯导设备、被测惯导产品。
12.优选地,所述第一gps天线和第二gps天线的间距大于1m。
13.与现有技术相比,本实用新型具有以下有益效果:。
14.(1)配备包括计程仪传感器、第一gps天线、第二gps天线、高精度惯导设备在内的完备的基准设备以提供全面的包括速度、经度、纬度、姿态在内的高精度基准信息;
15.(2)配备ups,在供电事故(外部供电中断)时仍能正常工作,提高了电源的稳定性和可靠性;
16.(3)机柜、显控机箱、ups机箱在与安装板和船舱舱壁安装处均设置了钢丝绳减振器,能抵抗海上船舶受海风、海浪和洋流等复杂环境的影响。
附图说明
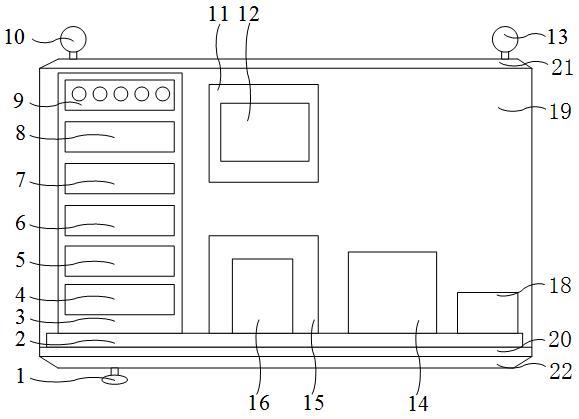
17.图1为本实用新型实施例的一种海上船舶惯导产品海上试验装置的结构示意图。
18.图2为本实用新型实施例的一种海上船舶惯导产品海上试验装置中的机柜的外形示意图。
19.图3为本实用新型实施例的一种海上船舶惯导产品海上试验装置中的显控机箱的外形示意图。
20.图4为本实用新型实施例的一种海上船舶惯导产品海上试验装置中的ups机箱的外形示意图。
21.图5为本实用新型实施例的一种海上船舶惯导产品海上试验装置中的机柜内设备状态监控灯面板的外形示意图。
22.图6为本实用新型实施例的一种海上船舶惯导产品海上试验装置在外部供电正常时各设备电源供应的原理示意图。
23.图7为本实用新型实施例的一种海上船舶惯导产品海上试验装置在外部供电中断时各设备电源供应的原理示意图。
24.图8为本实用新型实施例的一种海上船舶惯导产品海上试验装置中用于被测惯导产品精度评价的信号传输原理示意图。
25.图中标记:1、计程仪传感器,2、安装板,3、机柜,4、磁盘阵列,5、工控机,6、计程仪信号接收机,7、差分gps信号接收机,8、同步信号装置,9、机柜内设备状态监控灯面板,901、同步信号装置状态监控灯,902、差分gps信号接收机状态监控灯,903、计程仪信号接收机状态监控灯,904、工控机状态监控灯,905、磁盘阵列监控灯,10、第一gps天线,11、显控机箱,12、显控,13、第二gps天线,14、高精度惯导设备,15、ups机箱,16、ups,17、钢丝绳减震器,18、被测惯导产品,19、船舱,20、甲板,21、船顶,22、船底。
具体实施方式
26.为了让本实用新型的上述特征和优点更明显易懂,下面特举实施例,并配合附图,作详细说明如下。
27.如图1~8所示,本实施例提供了一种海上船舶惯导产品海上试验装置,包括机柜3、显控机箱11、ups机箱15、高精度惯导设备14、第一gps天线10、第二gps天线13和计程仪传感器1,所述机柜3和ups机箱15的底部分别通过(如多个)钢丝绳减震器17安装于安装板2上,所述高精度惯导设备14的底部安装于安装板2上,所述安装板2安装于船舱19内的甲板20上,所述安装板2还用于安装被测惯导产品18,所述机柜3和显控机箱11的背部分别通过(如多个)钢丝绳减震器17安装于船舱19舱壁上,所述第一gps天线10和第二gps天线13安装于船顶21,所述计程仪传感器1安装于船底22。
28.本实施例通过钢丝绳减震器17的设置,衰减了海风、海浪和洋流等复杂环境对机柜3、显控机箱11和ups机箱15的影响,从而提高整个试验装置在海上船舶上的安装可靠性。通过第一gps天线10和第二gps天线13分别接收gps信号,以形成差分gps信号;为保证差分gps信号的准确性,所述第一gps天线10和第二gps天线13的间距优选但不局限于大于1m。计程仪传感器1的原理是海流切割计程仪传感器1正面的电磁磁力线从而得到船体的速度,为保证船体运动造成的海流能完全切割电磁磁力线,计程仪传感器1在安装时需要保证其传感器正面正对船头方向,以提高计程仪传感器1测量得到的船体速度精度。
29.在本实施例中,所述机柜3中从上往下依次安装有机柜内设备状态监控灯面板9、同步信号装置8、差分gps信号接收机7、计程仪信号接收机6、工控机5和磁盘阵列4,所述同步信号装置8分别与高精度惯导设备14、计程仪信号接收机6、差分gps信号接收机7电性连接,所述差分gps信号接收机7分别与第一gps天线10、第二gps天线13分别通信连接,所述计程仪信号接收机6与计程仪传感器1通信连接,所述高精度惯性导航设备、计程仪信号接收机6、差分gps信号接收机7、触摸式显示屏、磁盘阵列4分别与工控机5电性连接,所述同步信号装置8和工控机5还分别用于电性连接被测惯导产品18。
30.其中,同步信号装置8的作用是给被测惯导产品18和各个基准设备发送同步信号,使得给被测惯导产品18和各个基准设备在接收到同步信号后发出同一时刻的导航信息,避免由于各个设备信号传输的延时或不同步造成的精度评定误差。
31.其中,高精度惯导设备14采用比被测惯导产品18精度高一个数量级的惯性器件,同时接收差分gps信号接收机7发送的高精度经度和纬度基准用于组合导航,其姿态精度远高于被测惯导产品18的姿态精度,因此将高精度惯导设备14输出的姿态信息作为姿态基准。
32.其中,差分gps信号接收机7的作用是接收第一gps天线10和第二gps天线13接收获得的差分gps信号,解析出差分gps信号中的经度和纬度信息;解析出差分gps信号中的经度和纬度信息一方面作为系统的经度和纬度信息的基准,另一方面被发送给高精度惯导设备14用于组合导航提高高精度惯导设备14输出的姿态基准的精度,克服了高精度惯导设备14在海上长时间航行情况下由于惯性器件的累积误差,无法保证长时间航行后期(一般为8小时之后)姿态基准的准确性的问题。
33.其中,计程仪信号接收机6的作用是接收计程仪传感器1发送的信号并解析出船体速度;解析出的速度信息作为系统的速度信息的基准。
34.其中,工控机5的作用是接收并对比被测惯导产品18和各个基准设备的导航信息,得到被测惯导产品18的导航精度;并将被测惯导产品18和各个基准设备的导航信息及被测惯导产品18的导航精度发送给磁盘阵列4。
35.其中,磁盘阵列4为若干个大数据容量的磁盘构成,用于保存海上船舶在长时间航行中被测惯导产品18和各个基准设备的导航信息及被测惯导产品18的导航精度。
36.在本实施例中,所述机柜内设备状态监控灯面板9上从左往右依次设置有同步信号装置状态监控灯901、差分gps信号接收机状态监控灯902、计程仪信号接收机状态监控灯903、工控机状态监控灯904和磁盘阵列监控灯905,分别用于监控在机柜3内安装的同步信号装置8、差分gps信号接收机7、计程仪信号接收机6、工控机5、磁盘阵列4的工作状态;各个设备的状态可由监控灯的亮与灭判断:若设备工作正常,则灯亮,若设备工作不正常,则灯灭。
37.在本实施例中,所述显控机箱11中安装有显控12,所述显控12用于显示被测惯导产品18、高精度惯导设备14、差分gps信号接收机7、计程仪信号接收机6、工控机5的工作状态及给被测惯导产品18、高精度惯导设备14、差分gps信号接收机7、计程仪信号接收机6、工控机5发出控制命令。
38.在本实施例中,所述ups机箱15内安装有ups16,所述ups16输出220v交流电给磁盘阵列4、工控机5、计程仪信号接收机6、显控12,所述ups16输出+24v直流电给差分gps信号接收机7、同步信号装置8、高精度惯导设备14、被测惯导产品18。
39.如图6~7所示,ups16的作用为两个:一是将外部220v交流电输入转化为+24v直流电,分别输出220v交流电和+24v直流电给对应负载;二是作为电池,当供电事故(外部供电中断)时,仍能输出220v交流电和+24v直流电给对应负载,从而实现系统可靠的电源稳定性。当外部供电正常时,外部220v交流电输入到ups16,对ups16进行充电,同时ups16输出220v交流电和+24v直流电给对应的设备;当供电事故(外部供电中断)时,ups16充当电池作用,继续输出220v交流电和+24v直流电给对应的设备,使得测试装置在供电事故(外部供电中断)时能继续正常工作,具有可靠的电源稳定性。进一步地,ups16优选但不局限于在外部供电中断情况下可继续工作8小时的ups产品。
40.如图8所示,用于被测惯导产品18精度评价的信号传输原理为:同步信号装置8给计程仪信号接收机6、差分gps信号接收机7、高精度惯导设备14和被测惯导产品18发送同步信号,计程仪信号接收机6、差分gps信号接收机7、高精度惯导设备14和被测惯导产品18在接收到同步信号后发出同一时刻的导航信息给工控机5,具体地:首先计程仪信号接收机6发送速度基准,差分gps信号接收机7发送经度和纬度基准,高精度惯导设备14发送姿态基准,被测惯导产品18发送包括速度、经度、纬度、姿态在内的导航信息,然后工控机5接收各个设备的导航信息进行对比,得到被测惯导产品18的海上试验导航精度,最后工控机5将各个设备的导航信息和被测惯导产品18的海上试验导航精度进行数据打包发送给磁盘阵列4,将数据存储在磁盘阵列4中。
41.其中,差分gps信号接收机7同时向高精度惯导设备14发送高精度的经度和纬度导航结果,用于组合导航,提高了高精度惯导设备14输出的姿态基准的精度,克服了高精度惯导设备14在海上船舶长时间航行情况下,由于惯性器件的累积误差,无法保证长时间航行后期(8小时之后)姿态基准的准确性的问题。
42.特别需要说明的是,本实施例中提及的各种电子设备均可采用现有成熟产品,在此不再赘述。
43.以上所述,仅为本实用新型的较佳实施例,并非对本实用新型做任何形式上的限
制,任何熟悉本领域的技术人员但凡未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所做任何简单的修改、均等变化与修饰,皆应属本实用新型的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1