防漏装检测机构及清洁装置的制作方法
1.本实用新型涉及到清洁技术领域,特别是涉及到一种防漏装检测机构及清洁装置。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。
3.目前市场上的扫地机器人基本上带有边刷,通过边刷旋转清扫垃圾,聚拢到机器中间,然后通过风机吸力或者滚刷吸取到机器尘盒中。
4.目前现有的扫地机器人,边刷为可拆装的,当边刷未装配到机器上时,将影响清扫效果,从而影响用户体验。因此现有技术存在缺陷需要改进。
技术实现要素:
5.本实用新型的主要目的为提供一种防漏装检测机构及清洁装置,旨在解决边刷未安装时就进行清扫的技术问题。
6.为了实现上述目的,本实用新型的技术方案如下:一种防漏装检测机构,应用于机器人本体,包括边刷组件,以及检查边刷组件是否安放到位的触发组件;
7.所述触发组件包括:
8.霍尔检测组件,设于所述机器人本体内;
9.其中,所述边刷组件内设有第一磁性件,所述边刷组件安装于所述霍尔检测组件上时,所述霍尔检测组件感应到第一磁性件时,则触发产生表征所述边刷组件到达安放位置的到达信号。
10.采用上述技术方案,所述的防漏装检测机构中,所述霍尔检测组件包括固定支架、霍尔元件及盖体,所述固定支架用于与所述机器人本体连接,所述固定支架内设有凹槽,所述霍尔元件设于凹槽内,所述盖体设于所述固定支架并盖设于所述霍尔元件。
11.采用上述各技术方案,所述的防漏装检测机构中,所述边刷组件包括对接部、边刷支架及刷毛,所述边刷支架套设于对接部上,所述边刷支架的边沿端设有若干组刷毛,所述对接部内设有容纳槽体,所述第一磁性件与容纳槽体的底部固定连接。
12.采用上述各技术方案,所述的防漏装检测机构中,所述固定支架外表面设有若干组铁片,所述容纳槽体的侧壁设有若干组第二磁性件,所述霍尔检测组件与所述边刷组件通过磁吸连接。
13.采用上述各技术方案,所述的防漏装检测机构中,所述容纳槽体的侧壁的自由端端面设置有插槽,所述第二磁性件插入所述插槽内,所述插槽的开口上设置有防尘盖。
14.采用上述各技术方案,所述的防漏装检测机构中,所述容纳槽体侧壁上设有对应所述第二磁性件的通孔。
15.采用上述各技术方案,所述的防漏装检测机构中,所述通孔的形状为椭圆形、三角形或长方形中的任意一种。
16.采用上述各技术方案,所述的防漏装检测机构中,所述机器人本体内设有电机组件,所述触发组件与所述电机组件传动连接
17.本技术还提出清洁装置,可用于提醒及检测边刷组件是否存在漏装。
18.采用上述各技术方案,所述的清洁装置,所述霍尔检测组件与所述清洁装置通过电性连接。
19.本实用新型带来的有益效果:本实用新型防漏装检测机构中,检测机构可检测机器人本体是否已安装边刷组件,通过第一磁性件感应霍尔检测组件的情况以检测边刷组件是否存在漏装,当边霍尔检测组件未感应到第一磁性件时,边刷组件存在漏装,检测机构将边刷组件漏装的情况反馈至机器人本体,机器人本体将不工作,从而解决边刷未安装时进行清扫的技术问题。
附图说明
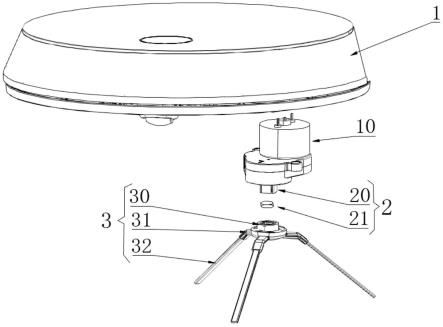
20.图1为本实用新型的整体结构示意图;
21.图2为本实用新型的霍尔检测组件结构示意图;
22.图3为本实用新型的边刷组件结构示意图。
23.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
24.应当理解,此处所描述的实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
25.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体地限定。
26.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
27.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第
一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度小于第二特征。
28.如图1所示,本技术实施例提供一种防漏装检测机构,应用于机器人本体1,包括边刷组件3,以及检查边刷组件3是否安放到位的触发组件2;
29.所述触发组件2包括:
30.霍尔检测组件20,设于所述机器人本体1内;
31.其中,所述边刷组件3内设有第一磁性件21,所述边刷组件3安装于所述霍尔检测组件20上时,所述霍尔检测组件20感应到第一磁性件21时,则触发产生表征所述边刷组件3到达安放位置的到达信号。
32.本实施例中,触发组件2可检测机器人本体1是否已安装边刷组件3,当边刷组件3已安装进入机器人本体1时,边刷组件3可带动第一磁性件21感应触发霍尔检测组件20,使机器人本体1收到边刷组件3已安装的信号;当边刷组件3未安装进入机器人本体1时,霍尔检测组件20将无法感应到第一磁性件21,从而机器人本体1将未检测到边刷组件3的安装,机器人本体1 将不工作,从而解决扫地机器人的边刷组件3未安装而没有相应提示的技术问题。
33.如图2所示,进一步,所述霍尔检测组件20包括固定支架201、霍尔元件202及盖体203,所述固定支架201用于与所述机器人本体1连接,所述固定支架201内设有凹槽2010,所述霍尔元件202设于凹槽2010内,所述盖体 203设于所述固定支架201并盖设于所述霍尔元件202。本实施例中,固定支架201与机器人本体1固定,固定支架201内的凹槽2010可保护以及稳定霍尔元件202,从而防止霍尔元件202受到损坏而触发组件2的检测结果。
34.如图1所示,进一步,所述边刷组件3包括对接部30、边刷支架31及刷毛32,所述边刷支架31套设于对接部30上,所述边刷支架31的边沿端设有若干组刷毛32,所述对接部30内设有容纳槽体301,所述第一磁性件21与容纳槽体301的底部固定连接。本实施例中,对接部30内设有容纳槽体301 可固定第一磁性件21,当边刷组件3安装到机器人本体1上时,霍尔元件202 将可感应到第一磁性件21,从而实现有效检测到边刷组件3的安装情况,刷毛32可对地板上的垃圾进行清洁。
35.如图2所示,进一步,所述固定支架201外表面设有若干组铁片204,所述容纳槽体301的侧壁设有若干组第二磁性件302,所述霍尔检测组件20与所述边刷组件3通过磁吸连接。本实施例中,铁片204及第二磁性件302的设置,可将霍尔检测组件20与边刷组件3通过磁吸连接,从而方便用户更换边刷组件3,且边刷组件3与霍尔检测组件20连接更稳定。
36.如图3所示,进一步,所述容纳槽体301的侧壁的自由端端面设置有插槽,所述第二磁性件302插入所述插槽内,所述插槽的开口上设置有防尘盖 3020。本实施例中,防尘盖3020的设置,可使第二磁性件302实现防水及防尘,延长第二磁性件302的使用寿命。
37.如图3所示,进一步,所述容纳槽体301侧壁上设有对应所述第二磁性件302的通孔303。本实施例中,通孔303的设置,可使边刷组件3与霍尔检测组件20磁吸连接时更加稳定,工作时不脱落。
38.进一步,所述通孔303的形状为椭圆形、三角形或长方形中的任意一种。本实施例中,通孔303的形状为椭圆形。
39.如图2所示,进一步,所述机器人本体1内设有电机组件10,所述触发组件2与所述电机组件10固定连接。本实施例中,电机组件10的设置,可带动电机组件10及边刷组件3进行旋转清洁地板,通过将地板上的垃圾进行聚拢清洁。
40.本技术还提出清洁装置,可用于提醒及检测边刷组件3是否存在漏装。
41.进一步,所述霍尔检测组件20与所述清洁装置通过电性连接。本实施例中,霍尔检测组件20可将边刷组件3是否安装反馈至清洁装置中,从而实现边刷组件3的防漏装。
42.采用上述各个技术方案,本实用新型防漏装检测机构中,检测机构可检测机器人本体是否已安装边刷组件,通过第一磁性件感应霍尔检测组件的情况以检测边刷组件是否存在漏装,当边霍尔检测组件未感应到第一磁性件时,边刷组件存在漏装,检测机构将边刷组件漏装的情况反馈至机器人本体,机器人本体将不工作,从而解决边刷未安装时进行清扫的技术问题。
43.以上仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1