一种海上风电工程船舶施工作业的数据采集系统的制作方法
1.本实用新型涉及一种海上风电工程船舶施工作业的数据采集系统。
背景技术:
2.海上风电工程主要分为风机基础施工和风机安装施工。风机基础施工主要有单桩基础施工、导管架基础施工和高桩承台基础施工等,用于上述海上风电基础施工的工程船舶主要有起重船、打桩船和运输船等。在海上风电基础施工作业中,经常由于波浪造成工程船舶六自由度的运动响应过大,或由于风速和波浪影响造成被吊物的运动响应过大,影响海上风电施工的正常开展,造成误工。对于风机安装施工,主要采用自升式平台船。由于自升式平台船在进行风机安装时的桩腿已经入泥站定,不存在船舶的运动响应影响。目前,业内对海上风电风机基础施工作业的可作业边界认识较少,现场施工主要依据经验进行。随着近海资源的逐步开发完善,未来海上风电将逐渐向水深更深、海浪条件更为恶劣的海域发展,单纯依靠施工经验进行单桩基础的安装将会给施工企业带来较大的风险,因此亟需采用一种科学合理的方式对施工的作业边界进行探索,通过对施工作业的数据进行采集便是一种可行的方式。
3.对施工作业的数据进行采集时,数据传输是一个较大的问题。数据传输一般分为有线传输和无线传输。若采用有线传输,由于施工作业期间被吊物经常处于运动状态,不适合采用有线传输的方式;若采用无线传输,则由于起重船和打桩船等工程船舶的吊臂较高,通常为几十米甚至上百米,在施工过程中吊臂一般都会旋转至主船体以外的区域进行施工,经常处于船上无线网络的覆盖范围之外,直接对采集到的数据进行无线传输容易造成不稳定甚至中断。
技术实现要素:
4.本实用新型的目的在于克服现有技术的缺陷而提供一种海上风电工程船舶施工作业的数据采集系统,它解决了海上风电施工作业中由于工程船舶的吊钩运动、吊臂较长、无线传输信号较弱而造成的数据采集问题。
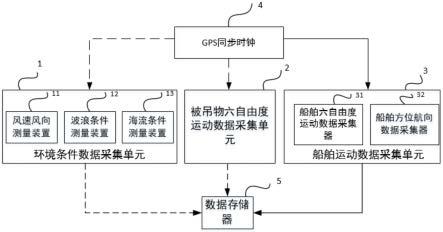
5.本实用新型的目的是这样实现的:一种海上风电工程船舶施工作业的数据采集系统,包括船舶运动数据采集单元、环境条件数据采集单元、被吊物六自由度运动数据采集单元、gps同步时钟和数据存储器;其中,
6.所述船舶运动数据采集单元包括船舶六自由度运动数据采集器和船舶方位航向数据采集器;
7.所述环境条件数据采集单元包括风速风向测量装置、波浪条件测量装置和海流条件测量装置;
8.所述gps同步时钟分别与所述环境条件数据采集单元和被吊物六自由度运动数据采集单元通过无线信号连接,所述gps同步时钟与所述船舶运动数据采集单元通过数据线连接;
9.所述数据存储器分别与所述环境条件数据采集单元和被吊物六自由度运动数据采集单元通过无线信号连接,所述数据存储器与所述船舶运动数据采集单元通过数据线连接。
10.上述的海上风电工程船舶施工作业的数据采集系统,其中,所述被吊物六自由度运动数据采集单元为安装在工程船舶的吊钩位置的惯性测量装置。
11.上述的海上风电工程船舶施工作业的数据采集系统,其中,所述船舶六自由度运动数据采集器为布置在工程船舶的重心位置的姿态传感器;所述船舶方位航向数据采集器为布置在工程船舶的驾驶室内的电磁罗经。
12.上述的海上风电工程船舶施工作业的数据采集系统,其中,所述风速风向测量装置为布置在工程船舶驾驶室上方的船用风向风速仪;所述波浪条件测量装置为波浪骑士仪;所述海流条件测量装置为海流计;所述波浪骑士仪和海流计均是以悬浮的姿态布置在工程船舶附近10m范围内的海域。
13.上述的海上风电工程船舶施工作业的数据采集系统,其中,所述gps同步时钟布置在工程船舶的驾驶室内。
14.上述的海上风电工程船舶施工作业的数据采集系统,其中,所述数据存储器布置在工程船舶的驾驶室内。
15.本实用新型的海上风电工程船舶施工作业的数据采集系统具有以下特点:
16.施工作业期间,即吊钩的位置处于无线网络覆盖范围外,在这一过程中,船舶六自由度运动数据采集器、船舶方位航向数据采集器、风力风向测量装置、波浪条件测量装置、海流条件测量装置、被吊物六自由度运动数据采集单元对相应的数据进行采集,并将采集得到的数据存储在各自的内置存储卡内。施工完毕后,吊钩的位置处于无线网络覆盖范围之内,此时,通过无线传输的方式将风力风向测量装置、波浪条件测量装置、海流条件测量装置和被吊物六自由度运动数据采集单元中采集到的数据传输至数据存储器中,并通过有线传输的方式将船舶六自由度运动数据采集器、船舶方位航向数据采集器中测量到的数据存储到数据存储器。通过本实用新型的数据采集系统,解决了海上风电施工作业中由于工程船舶的吊钩运动、吊臂较长、无线传输信号较弱而造成的数据采集问题。
附图说明
17.图1是本实用新型的海上风电工程船舶施工作业的数据采集系统的结构框图;
18.图2是本实用新型的海上风电工程船舶施工作业的数据采集系统的一种实施例的结构框图;
19.图3是本实用新型的海上风电工程船舶施工作业的数据采集系统中采用的装置的布置结构图;
20.图4是本实用新型的海上风电工程船舶施工作业的数据采集系统中采用的部分装置在驾驶室内的布置结构图。
具体实施方式
21.下面将结合附图对本实用新型作进一步说明。
22.请参阅图1至图4,本实用新型的海上风电工程船舶施工作业的数据采集系统,包
括船舶运动数据采集单元3、环境条件数据采集单元1、被吊物六自由度运动数据采集单元2、gps同步时钟4和数据存储器5。
23.船舶运动数据采集单元3包括船舶六自由度运动数据采集器31和船舶方位航向数据采集器32;船舶六自由度运动数据采集器31采集船舶的横摇、纵摇、垂荡、横荡、纵荡和艏摇这六个自由度的运动响应;船舶方位航向数据采集器32采集船舶在具体时刻的航向和方位。
24.环境条件数据采集单元1包括风速风向测量装置11、波浪条件测量装置12和海流条件测量装置13;风力风向测量装置11采集施工海域的风速、风向等环境数据;波浪条件测量装置12测量施工海域的波浪周期、波高、波向等环境数据;海流条件测量装置13采集海流的流速和流向等环境数据。
25.被吊物六自由度运动数据采集单元2采集被吊物的六自由度运动数据。由于被吊物的六自由度运动情况与工程船舶100的吊钩(安装在起重吊臂6上)位置的运动情况是一致的,且在一次完整的施工过程中存在起吊多个被吊物的情况,为了避免更换被吊物时频繁拆装被吊物六自由度运动数据测量单元2,被吊物六自由度运动数据主要通过采集吊钩位置的运动数据得到,因此将被吊物六自由度运动数据采集单元2安装在工程船舶的吊钩位置。
26.船舶六自由度运动数据采集器31、船舶方位航向数据采集器32、风力风向测量装置11、波浪条件测量装置12、海流条件测量装置13和被吊物六自由度运动数据采集单元2均带有内置的储存卡,以供从施工开始到施工结束期间对采集到的数据进行存储,并将每个时刻采集到的船舶运动数据、被吊物六自由度运动数据和环境条件数据都将实时地存储到对应的储存卡内。
27.gps同步时钟4分别与环境条件数据采集单元1和被吊物六自由度运动数据采集单元2通过无线信号连接,gps同步时钟4与船舶运动数据采集单元3通过数据线连接。gps同步时钟4从gps卫星上获取标准的时间信号,通过无线网络传输至被吊物六自由度运动数据采集单元2和环境条件数据采集单元1,并通过数据线传输给船舶运动数据采集单元3,使得上述三个单元的时间始终与gps卫星上的标准时间保持一致,以达到整个系统的时间同步。
28.数据存储器5分别与环境条件数据采集单元1和被吊物六自由度运动数据采集单元2通过无线信号连接,数据存储器5与船舶运动数据采集单元3通过数据线连接。数据存储器5用于将上述三个单元采集到的数据进行储存。
29.船舶运动数据采集单元3中的船舶六自由度运动数据采集器31为布置在工程船舶的重心位置的姿态传感器310(型号为kongsberg mru5);船舶方位航向数据采集器32为布置在工程船舶的驾驶室7的控制台8上的电磁罗经320(型号为gm-20/21);
30.环境条件数据采集单元1中的风速风向测量装置11为布置在工程船舶100的驾驶室7上方的船用风向风速仪110(型号为am706-h船用风向风速仪);波浪条件测量装置12为波浪骑士仪120(型号为dwr kiii 0.9m波浪骑士仪);海流条件测量装置13为海流计130(型号为valeport model 106海流计);波浪骑士仪120和海流计130均是以悬浮的姿态布置在工程船舶100附近10m范围内的海域;
31.被吊物六自由度运动数据测量单元2为惯性测量装置20(型号为smc imu)
32.gps同步时钟4和数据存储器5均布置在工程船舶100的驾驶室7内。
33.本实用新型的海上风电工程船舶施工作业的数据采集系统,在一次完整的数据采集期间内,各单元之间是这样配合完成操作的:
34.gps同步时钟4将从gps卫星上获取标准的时间信号通过有线传输的方式对姿态传感器310和电磁罗经320进行时间同步操作,通过无线传输的方式对船用风向风速仪110、波浪骑士仪120、海流计130和惯性测量装置20进行时间同步。
35.施工作业期间,吊钩的位置会出现变化,安装在吊钩内的惯性测量装置20也会随着一起改变位置,在某些时间段可能处于无线网络的覆盖范围之外。姿态传感器310、电磁罗经320、船用风向风速仪110、海流计130、波浪骑士仪120的相对位置基本保持不变。在这一过程中,姿态传感器310、电磁罗经320、船用风向风速仪110、波浪骑士仪120、海流计130和惯性测量装置20对应地采集各自的数据,并将采集到的数据存储在各自的内置存储卡内。
36.施工完毕后,工程船舶的起重吊臂6收缩,使吊钩收回到无线网络的覆盖范围之内,此时,通过无线传输的方式将船用风向风速仪110、波浪骑士仪120、海流计130和惯性测量装置20中采集到的数据传输至数据存储器5,并通过有线传输的方式将姿态传感器310和电磁罗经320中测量到的数据存储到数据存储器5中。
37.以上实施例仅供说明本实用新型之用,而非对本实用新型的限制,有关技术领域的技术人员,在不脱离本实用新型的精神和范围的情况下,还可以作出各种变换或变型,因此所有等同的技术方案也应该属于本实用新型的范畴,应由各权利要求所限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1