一款经济型简易式三维力传感器的制作方法
1.本实用新型涉及三维力传感器技术领域,具体来说涉及一款经济型简易式三维力传感器。
背景技术:
2.多维力传感器指的是一种能够同时测量两个方向以上力及力矩分量的力传感器,在笛卡尔坐标系中力和力矩可以各自分解为三个分量,三维力传感器能同时检测三维空间的三个力信息,通过它控制系统不但能检测和控制机器人手爪取物体的握力,而且还可以检测抓物体的重量,以及在抓取操作过程中是否有滑动、振动等。
3.如专利cn210375495u,公开的一种多维力传感器,包括弹性主体和两个分别安装在所述弹性主体的顶端和底端的安装座,其特征在于,所述弹性主体为圆柱状,所述弹性主体内开设有圆柱形空腔,所述弹性主体上开设有与所述空腔相通的圆形通槽,所述空腔的中心线与所述弹性主体的轴心线重合,所述通槽的中心线垂直于所述空腔的中心线,所述空腔内固定连接有支撑梁;所述弹性主体上安装有三组共六个应变片,每组的两个应变片为180度分布,三组应变片分别为t型片、羽毛片和单直片,两个所述t型片组成全桥,两个所述羽毛片组成全桥,两个所述单直片组成1/2桥。本实用新型为实现节约成本防止性能过剩的理念,采用多种类型的应变片即可使得弹性体达到多维力测控要求,适合用于精度要求要求相对较低的行业;弹性体内设置有支撑梁,提高传感器整体的耐冲击性,延长传感器的使用寿命。
4.在实际操作过程中,传统的三维力传感器,结构复杂,生产成本高,不符合部分有成本要求的大批量应用场景,且没有较好的防过载结构,容易承受较高的压力,造成损坏。
5.可见,现有技术存在的上述问题,亟待改进。
技术实现要素:
6.鉴于现有技术存在的上述问题,本实用新型的一方面目的在于提供一款经济型简易式三维力传感器,以解决传统的三维力传感器,结构复杂,生产成本高,不符合部分有成本要求的大批量应用场景,且没有较好的防过载结构,容易承受较高的压力,造成损坏等问题。
7.为了实现上述目的,本实用新型提供的一款经济型简易式三维力传感器,包括传感组件,所述传感组件保持呈倒“t”字型的外壳,所述外壳的外壁设置依次设置有x轴传感机构、y轴传感机构和z轴传感机构,所述传感组件的底部居中设置有信号线,所述信号线的输入端连接于x轴传感机构、y轴传感机构和z轴传感机构。
8.通过呈“t”字型的外壳,可使x轴传感机构和y轴传感机构设置于竖直方向对准于水平方向,z轴传感机构设置于水平方向对准于竖直方向,且通过底部的信号线连接于各个传感机构对三维力进行检测。
9.作为优选的,所述z轴传感机构包括四片对称设置于外壳顶部的z轴应变片,所述z
轴应变片的底部设置有第三通槽,所述第三通槽的底部开设有线路槽,所述线路槽连接于信号线。
10.z轴传感机构包括四个z轴应变片,由上至下的力为z轴正方向,由下至上的方向为z轴负方向,且通过底部开设的第三通槽和线路槽,可将信号线与z轴应变片相接,从而输出力的大小。
11.作为优选的,所述x轴传感机构包括四片对称设置于外壳外壁的x轴应变片,所述x轴应变片之间的外壳内部开设有第一通槽。
12.设定面对线路槽的外壳为正面,则x轴应变片竖直设置于外壳左右两侧的外壁,则从右往左为x轴负方向,从左往右为x轴正方向,且通过内部开设的第一通槽,增大承载压力。
13.作为优选的,所述y轴传感机构包括四片对称设置于外壳外壁的y轴应变片,且所述y轴应变片设置于x轴应变片的底部,所述y轴应变片之间的外壳内部开设有第二通槽。
14.面对线路槽的外壳为正面,则y轴应变片竖直设置于外壳前后两侧的外壁,且从后往前y轴负方向,从前往后为y轴正方向,且通过内部开设的第二通槽,增大其承载压力。
15.作为优选的,所述第一通槽、第二通槽和第三通槽均呈“8”字型,所述第一通槽、第二通槽和第三通槽被装配用于增大所述传感组件承载压力。
16.通过呈“8”字型的第一通槽、第二通槽和第三通槽,使其内部呈弧度,便于其形变,增大传感组件的承载压力。
17.作为优选的,所述外壳的顶部和底部分别开设有第一螺纹孔和第二螺纹孔,所述第一螺纹孔和第二螺纹孔被装配用于驱使传感组件保持固定。
18.通过第一螺纹孔和第二螺纹孔可将传感组件进行固定。
19.作为优选的,所述传感组件为一体式结构。
20.通过一体式结构减少装配故障率,安装方便。
21.有益效果:
22.与现有技术相比,本实用新型提供的一款经济型简易式三维力传感器,具备以下有益效果是:
23.1、通过呈“t”字型的外壳,可使x轴传感机构和y轴传感机构设置于竖直方向对准于水平方向,z轴传感机构设置于水平方向对准于竖直方向,且通过底部的信号线连接于各个传感机构对三维力进行检测。
24.2、通过呈“8”字型的第一通槽、第二通槽和第三通槽,使其内部呈弧度,便于其形变,增大传感组件的承载压力。
附图说明
25.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
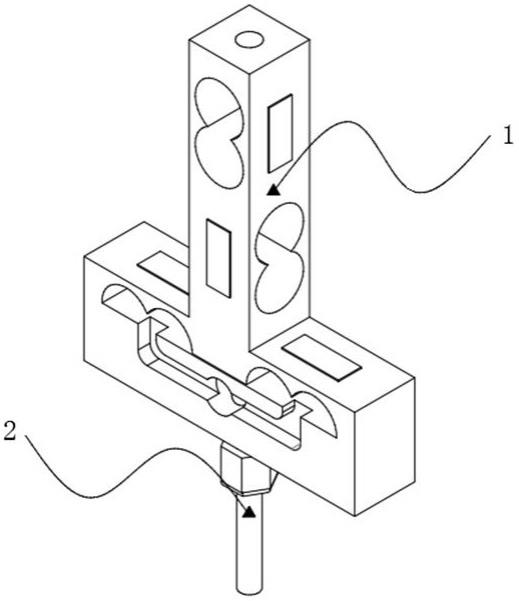
26.图1为本实用新型实施例提供的三维力传感器的结构示意图;
27.图2为本实用新型实施例提供的传感组件的结构示意图;
28.图3为本实用新型实施例提供的传感组件剖面的结构示意图。
29.主要附图标记:
30.1、传感组件;2、信号线;101、外壳;102、x轴应变片;103、第一通槽;104、y轴应变片;105、第二通槽;106、z轴应变片;107、第一螺纹孔;108、线路槽;109、第二螺纹孔;110、第三通槽。
具体实施方式
31.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
32.如图1-3所示,一款经济型简易式三维力传感器,包括传感组件1,传感组件1保持呈倒“t”字型的外壳101,外壳101的外壁设置依次设置有x轴传感机构、y轴传感机构和z轴传感机构,传感组件1的底部居中设置有信号线2,信号线2的输入端连接于x轴传感机构、y轴传感机构和z轴传感机构。
33.该经济型简易式三维力传感器主要目的是为了通过呈“t”字型的外壳101,可使x轴传感机构和y轴传感机构设置于竖直方向对准于水平方向,z轴传感机构设置于水平方向对准于竖直方向,且通过底部的信号线2连接于各个传感机构对三维力进行检测;还通过呈“8”字型的第一通槽103、第二通槽105和第三通槽110,使其内部呈弧度,便于其形变,增大传感组件1的承载压力。
34.本实用提供的技术方案中,由图1、图2和图3可知,z轴传感机构包括四片对称设置于外壳101顶部的z轴应变片106,且由上至下的力为z轴正方向,由下至上的力为z轴负方向,且通过底部开设的第三通槽110以及底部连接的线路槽108,一方面可使z轴应变片106与信号线2相连接,其次通过“8”字形的第三通槽110,可增大z方向的承载力。
35.再者,以有线路槽108一侧为正面,则x轴传感机构包括四片对称设置于外壳101左右两侧外壁的x轴应变片102,则从右往左为x轴负方向,从左往右为x轴正方向,且两对x轴应变片102之间的外壳101之间还开设有第一通槽103。
36.再者,以有线路槽108一侧为正面,则y轴传感机构包括四片对称设置于外壳101前后两侧外壁的y轴应变片104,且y轴应变片104位于x轴应变片102的底部,则从后往前y轴负方向,从前往后为y轴正方向,且两对y轴应变片104之间的外壳101内部还开设有第二通槽105。
37.再者,第一通槽103、第二通槽105和第三通槽110均呈“8”字型,增大内部空间,且使其内部呈圆弧状,可承载更大的压力。
38.再者,外壳101的顶部和底部分别开设有第一螺纹孔107和第二螺纹孔109,且第一螺纹孔107和第二螺纹孔109通过配合可将传感组件1进行固定,防止因自身移动导致受力测力不准。
39.本实用提供的技术方案中,由图1可知,传感组件1为一体式结构,可减少装配故障率,安装方便。
40.工作原理:首先通过第一螺纹孔107和第二螺纹孔109的配合将传感组件1进行固定,便于进行精确测力;
41.以有线路槽108一侧为正面,外壳101左右两侧的外壁对称设置有共四个x轴应变片102,外壳101前后两侧外壁分别对称设置有共四个y轴应变片104,外壳101的顶部关于第
一螺纹孔107对称设置有共四个z轴应变片106;
42.且以有线路槽108一侧为正面,由上至下的力为z轴正方向,由下至上的力为z轴负方向;从右往左为x轴负方向,从左往右为x轴正方向;从后往前y轴负方向,从前往后为y轴正方向,通过线路槽108将各个应变片连接于信号线2,将受力值进行传输;
43.且通过呈“8”字型的第一通槽103、第二通槽105和第三通槽110,使传感组件1受力过大时保护传感组件1各轴结构不受损坏。
44.以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1