一种3D传感模组及电子设备的制作方法
一种3d传感模组及电子设备
【技术领域】
1.本技术涉及光学成像技术领域,尤其涉及一种3d传感模组及电子设备。
背景技术:
2.接近度传感器按照工作原理的不同通常可以分为三类,分别为红外接近传感器、基于spad(single photon avalanche diode,单光子雪崩二极管)的单点d-tof(direct-time of flight,直接飞行时间)传感器和超声波距离传感器。其中,红外接近传感器通过红外激光或红外led(light-emitting diode,发光二极管)向目标物体发射周期性脉冲,并且通过红外探测器接收经目标物体反射的周期性脉冲,同时根据反射的周期性脉冲的光强来判断目标物体与自身之间的距离(光强越大,距离越近),其无法用于准确的距离测量,只能用于大致判断有无物体靠近。单点d-tof传感器通过发射器向目标物体发射光信号,并且通过采集器接收经目标物体反射的回波信号,同时根据发射光信号与接收回波信号之间所历经的时间来换算出自身与目标物体之间的距离,其距离的测量精度虽然较高,但是成本也较为昂贵。超声波距离传感器通过发射器向目标物体发射超声波,并且通过接收器接收经目标物体反射的超声波,同时根据反射的超声波的延迟时间来计算出自身与目标物体之间的距离。不管是哪种类型的接近度传感器,其感知的视场角通常较小,大约处于10~30度之间。
3.3d传感模组按照工作原理的不同通常可以分为三类,分别为tof模组、结构光模组和双目模组,其主要用于获取目标物体的深度图像。对于一些特殊的应用场景,比如刷脸开锁、刷脸支付等场景,其需要将接近度传感器与3d传感模组结合使用,此类应用场景下3d传感模组大部分时间处于关闭状态,只有接近度传感器长期处于开启状态以检测是否有人靠近,而一旦接近度传感器检测到有人靠近,则会触发3d传感模组进行人脸的检测与识别;再比如机器人避障导航等场景,其也需要将接近度传感器与3d传感模组结合使用,此类应用场景下3d传感模组会实时检测周围的环境以判断有无障碍物,目的是方便对下一步的动作和行进路径进行规划,但是3d传感模组存在一定的视野盲区,即无法检测到正前方近距离处(比如0.3m以内)的障碍物,此时便需要通过接近度传感器对正前方近距离处进行检测以判断有无障碍物,从而弥补3d传感模组所存在的视野盲区。可以发现的是,在接近度传感器与3d传感模组结合使用的应用场景中,接近度传感器与3d传感模组之间是相对独立(即分开设置)的,从而导致整体尺寸、质量较大,制造成本较高,并且接近度传感器与3d传感模组之间的同步、通讯也增大了后端应用开发的复杂度。
4.因此,有必要设计一种集成接近度传感与3d传感功能的模组。
技术实现要素:
5.本技术提供了一种3d传感模组及电子设备,旨在解决相关技术中接近度传感器与3d传感模组结合使用时整体尺寸、质量较大,制造成本较高的问题。
6.为了解决上述技术问题,本技术实施例第一方面提供了一种3d传感模组,包括发
射器、采集器以及控制与处理器,控制与处理器用于:在深度成像模式下控制发射器向目标物体发射第一出射散斑光束,以及控制采集器全局曝光与发射器形成第一探测通道以接收第一出射散斑光束经目标物体反射的第一反射散斑光束,并根据第一反射散斑光束生成目标物体的深度图像;或者,在接近度传感模式下控制发射器向目标物体发射第二出射散斑光束,以及控制采集器局部曝光与发射器形成第二探测通道以接收第二出射散斑光束经目标物体反射的第二反射散斑光束,并根据第二反射散斑光束生成自身与目标物体之间的距离;其中,第一出射散斑光束的视场角、光斑密度均大于第二出射散斑光束。
7.在一些实施例中,发射器包括光源、准直元件和衍射光学元件;其中:光源用于在深度成像模式下向目标物体发射第一光束经过准直元件和衍射光学元件形成投射于目标物体的所述第一出射散斑光束,或在接近度传感模式下向目标物体发射第二光束经过准直元件和衍射光学元件形成投射于目标物体的第二出射散斑光束。在一个实施例中,光源包括发光区域,在深度成像模式下,发光区域的全部区域发光,接近度传感模式下控制发光区域的部分区域发光。在一个实施例中,光源包括多个子光源,深度成像模式下全部子光源发光,接近度传感模式下部分子光源发光。
8.在一些实施例中,发射器包括第一光源、第二光源、准直元件和衍射光学元件;第一光源用于在深度成像模式下向目标物体发射第一光束经过准直元件和衍射光学元件形成投射于目标物体的第一出射散斑光束,第二光源用于在接近度传感模式下向目标物体发射第二光束经过准直元件和衍射光学元件形成投射于目标物体的第二出射散斑光束。在一个实施例中,衍射光学元件包括第一衍射区域和第二衍射区域,第一衍射区域与第一光源对应,第二衍射区域与第二光源对应。具体的,第一衍射区域包括微纳结构和微透镜阵列中的任一种;第二衍射区域包括微纳结构、微透镜阵列和透明玻璃中的任一种。
9.在一些实施例中,采集器包括采集芯片,采集芯片上设置有感光区域,控制与处理器具体用于:在深度成像模式下控制感光区域的全部区域开启与发射器形成第一探测通道以接收第一反射散斑光束,或在接近度传感模式下控制感光区域的部分区域开启与发射器形成第二探测通道以接收第二反射散斑光束。在一个实施例中,感光区域包括第一区域和第二区域,在深度成像模式下控制第一区域及第二区域开启,接近度传感模式下控制第一区域开启。
10.在一些实施例中,采集器包括第一采集器和第二采集器,控制与处理器具体用于:在深度成像模式下控制第一采集器及第二采集器全局曝光与发射器形成第一探测通道以接收第一反射散斑光束,并根据第一反射散斑光束生成目标物体的深度图像;或,在接近度传感模式下控制第一采集器和/或第二采集器局部曝光与发射器形成第二探测通道以接收第二反射散斑光束,并根据第二反射散斑光束生成自身与所述目标物体之间的距离。
11.本技术实施例第二方面提供了一种电子设备,包括本技术实施例第一方面所述的3d传感模组。
12.从上述描述可知,与相关技术相比,本技术的有益效果在于:
13.以发射器、采集器以及控制与处理器构成3d传感模组,同时为所构成的3d传感模组设置两种工作模式,分别为深度成像模式和接近度传感模式。基于此,当需要获取目标物体的深度图像时,可以将3d传感模组调整为深度成像模式,此模式下发射器会向目标物体发射第一出射散斑光束,采集器会采用全局曝光与发射器形成第一探测通道以接收第一出
射散斑光束经目标物体反射的第一反射散斑光束,控制与处理器会根据第一反射散斑光束生成目标物体的深度图像;当需要获取3d传感模组与目标物体之间的距离信息时,可以将3d传感模组调整为接近度传感模式,此模式下发射器会向目标物体发射第二出射散斑光束,采集器会采用局部曝光与发射器形成第二探测通道以接收第二出射散斑光束经目标物体反射的第二反射散斑光束,控制与处理器会根据第二反射散斑光束生成3d传感模组与目标物体之间的距离信息。由此可见,本技术提供的3d传感模组既可以获取目标物体的深度图像,又可以获取3d传感模组与目标物体之间的距离信息,这相当于将诸如刷脸开锁、刷脸支付、机器人避障导航等场景中的3d传感模组与接近度传感器进行了整合,使得3d传感模组与接近度传感器能够共用一个发射器和一个采集器,即不必再将3d传感模组与接近度传感器分开设置,从而能够有效地减小整体体积、质量,大幅度节约了制造成本,同时也降低了后端应用开发的复杂度。
【附图说明】
14.为了更清楚地说明相关技术或本技术实施例中的技术方案,下面将对相关技术或本技术实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,而并非是全部实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
15.图1为本技术实施例提供的3d传感模组的一种结构示意图;
16.图2为本技术实施例提供的发射器的一种结构示意图;
17.图3为本技术实施例提供的光源的结构示意图;
18.图4为本技术实施例提供的衍射光学元件的光束复制示意图;
19.图5为本技术实施例提供的发射器的另一种结构示意图;
20.图6为本技术实施例提供的衍射光学元件的结构示意图;
21.图7为本技术实施例提供的采集器的结构示意图;
22.图8为本技术实施例提供的感光区域的结构示意图;
23.图9为本技术实施例提供的3d传感模组的另一种结构示意图。
【具体实施方式】
24.为了使本技术的目的、技术方案以及优点更加的明显和易懂,下面将结合本技术实施例以及相应的附图,对本技术进行清楚、完整地描述,其中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。应当理解的是,下面所描述的本技术的各个实施例仅仅用以解释本技术,并不用于限定本技术,也即基于本技术的各个实施例,本领域的普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。此外,下面所描述的本技术的各个实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
25.图1为本技术实施例提供的3d传感模组的一种结构示意图,该3d传感模组采用单目结构光的形式,其包括发射器10、采集器20以及控制与处理器(图中未示出)。具体地,控制与处理器用于:在深度成像模式下控制发射器10向目标物体发射第一出射散斑光束,以及控制采集器20全局曝光与发射器10形成第一探测通道以接收第一出射散斑光束经目标
物体反射的第一反射散斑光束,并根据第一反射散斑光束生成目标物体的深度图像;或者,在接近度传感模式下控制发射器10向目标物体发射第二出射散斑光束,以及控制采集器20局部曝光与发射器10形成第二探测通道以接收第二出射散斑光束经目标物体反射的第二反射散斑光束,并根据第二反射散斑光束生成自身与目标物体之间的距离。在本实施例中,用于深度成像的第一出射散斑光束是一种由大量光斑构成的散斑光束,其具有完整的特征图案;用于接近度传感的第二出射散斑光束是一种由少量光斑构成的散斑光束,其不具有完整的特征图案,但是其光斑可以是任意的形状。
26.可以理解的是,由于第一出射散斑光束被用来对目标物体进行3d感知(即获取目标物体的深度图像),而第二出射散斑光束被用来对目标物体进行近距离感测(即获取目标物体与3d传感模组之间的距离信息),所以本实施例中第一出射散斑光束的视场角、光斑密度等均应当大于第二出射散斑光束。此外,“发射器10发射第一出射散斑光束及采集器20接收第一反射散斑光束”与“发射器10发射第二出射散斑光束及采集器20接收第二反射散斑光束”之间是“或”的关系,“控制与处理器生成目标物体的深度图像”与“控制与处理器生成3d传感模组与目标物体之间的距离信息”之间也是“或”的关系,这就说明本实施例中3d传感模组所具有的深度成像模式与接近度传感模式之间在时序上属于非交叠的关系,即要么处于深度成像模式,去执行对目标物体的3d感知,要么处于接近度传感模式,去执行对目标物体的近距离感测,而不能同时处于深度成像模式和接近度传感模式。
27.在实际应用中,当需要获取目标物体的深度图像时,可以将3d传感模组调整为深度成像模式,而在此模式下发射器10会向目标物体发射第一出射散斑光束,采集器20会采用全局曝光与发射器10形成第一探测通道以接收第一出射散斑光束经目标物体反射的第一反射散斑光束,控制与处理器会根据第一反射散斑光束生成目标物体的深度图像;当需要获取3d传感模组与目标物体之间的距离信息时,可以将3d传感模组调整为接近度传感模式,而在此模式下发射器10会向目标物体发射第二出射散斑光束,采集器20会采用局部曝光与发射器10形成第二探测通道以接收第二出射散斑光束经目标物体反射的第二反射散斑光束,控制与处理器会根据第二反射散斑光束生成3d传感模组与目标物体之间的距离信息。
28.作为一种实例,在刷脸开锁/支付的应用场景中,3d传感模组会一直处于接近度传感模式以实时检测模组前方是否有人靠近,当检测结果为模组前方有人靠近时,则将3d传感模组的工作模式调整为深度成像模式以获取人脸的深度和红外等信息,并根据所获取的深度和红外等信息进行人脸的识别与检测,而在人脸的识别与检测完成后,3d传感模组又会重新处于接近度传感模式以实时检测模组前方是否有人靠近。
29.作为另一种实例,在机器人避障导航的应用场景中,3d传感模组会处于接近度传感模式与深度成像模式交替运行(或者,接近度传感模式低频交错、深度成像模式高频交错运行)的状态,使得机器人既能够实时检测周围环境远距离处是否有障碍物,又能够实时检测正前方近距离处(比如0.3m以内)是否有障碍物,有利于机器人对下一步的动作和行进路径进行规划。
30.由上可见,本实施例以发射器10、采集器20以及控制与处理器构成3d传感模组,同时为所构成的3d传感模组设置两种工作模式,分别为深度成像模式和接近度传感模式;其中,深度成像模式用于对目标物体进行3d感知,接近度传感模式用于对目标物体进行近距
离感测。重要的是,本实施例既可以获取目标物体的深度图像,又可以获取3d传感模组与目标物体之间的距离信息,这相当于将诸如刷脸开锁、刷脸支付、机器人避障导航等场景中的3d传感模组与接近度传感器进行了整合,使得3d传感模组与接近度传感器能够共用一个发射器10和一个采集器20,即不必再将3d传感模组与接近度传感器分开设置,从而能够有效地减小整体体积、质量,大幅度节约了制造成本,同时也降低了后端应用开发的复杂度。
31.作为一种实施方式,请参阅图2,图2为本技术实施例提供的发射器的一种结构示意图。发射器10包括光源11、准直元件12、衍射光学元件13和发射电路板14,其中,光源11设置于发射电路板14上,准直元件12和衍射光学元件13均架设于发射电路板14上,准直元件12和衍射光学元件13均位于光源11的光路上,准直元件12位于光源11与衍射光学元件13之间。对于光源11的类型,其可以是vcsel(vertical-cavity surface-emitting laser,垂直腔面发射激光器)、eel(edge emitting laser,边缘发射激光器)和led(light-emitting diode,发光二极管)等一系列可发出红外波段的光学有源器件。
32.在本实施方式中,光源11用于在深度成像模式下向目标物体发射第一光束;或者,在接近度传感模式下向目标物体发射第二光束。准直元件12用于在深度成像模式下对第一光束进行准直以投射至衍射光学元件13;或者,在接近度传感模式下对第二光束进行准直以投射至衍射光学元件13。衍射光学元件用于在深度成像模式下对第一光束进行复制以形成投射于目标物体的第一出射散斑光束;或者,在接近度传感模式下对第二光束进行复制以形成投射于目标物体的第二出射散斑光束。
33.可以理解的是,深度成像模式下光源11发射的第一光束经由准直元件12准直后到达衍射光学元件13,衍射光学元件13对到达的第一光束进行复制从而形成第一出射散斑光束,并将所形成的第一出射散斑光束投射至目标物体;接近度传感模式下光源11发射的第二光束经由准直元件12准直后到达衍射光学元件13,衍射光学元件13对到达的第二光束进行复制从而形成第二出射散斑光束,并将所形成的第二出射散斑光束投射至目标物体;此过程中虽然衍射光学元件13对第一光束和第二光束都进行了复制,但是复制的结果不同,即复制的结果使得第一出射散斑光束的视场角、光斑密度等均大于第二出射散斑光束。
34.在一个具体实现中,请参阅图3,图3为本技术实施例提供的光源的结构示意图。光源11包括发光区域111,此种情况下控制与处理器可以用于在深度成像模式下控制发光区域111的全部区域发光以向准直元件12投射第一光束,或在接近度传感模式下控制发光区域111的部分区域(比如发光区域111的中心区域a)发光以向准直元件12投射第二光束。可以理解的是,深度成像模式下发光区域111的全部区域被点亮,其发射出的第一出射散斑光束的光斑较多且较为密集,构成了完整的特征图案;接近度传感模式下发光区域111的部分区域被点亮,其发射出的第二出射散斑光束的光斑较少且较为稀疏,无法构成完整的特征图案,但是能够实现低功耗运行,足以满足近距离感测。
35.示例性地,光源11为包括多个子光源的光源阵列,该多个子光源构成上述发光区域111,此种情况下控制与处理器可以用于在深度成像模式下控制全部子光源发光以向准直元件12投射第一光束,或在接近度传感模式下控制部分子光源(比如中心区域a处的子光源)发光以向准直元件12投射第二光束。需要说明的是,由于本实施例采用单目结构光的形式,所以为了满足结构光的计算模式,光源阵列中的多个子光源应当呈非规则排布。
36.对于衍射光学元件13的光束复制,可以参阅图4,图4中的虚线框表示光场区域、虚
线框中的实心圆点表示一个光束,图4(1)中有一个虚线框(该虚线框内有一个实心圆点),图4(2)中共有9个虚线框(每个虚线框内均有一个实心圆点)。在接近度传感模式下光源阵列中只有少数子光源发光,假设只有一个子光源发光,那么其投射出的散斑光场便如图4(1)所示,经过衍射光学元件13进行9倍的复制,复制出的散斑光场便如图4(2)所示,从图4(2)中可以看出每个光场区域内仅有一个光束,从而得到光斑较少的第二出射散斑光束。在深度成像模式下光源阵列中全部子光源均发光,此时单个光场区域内的光束数量不再为一个,而是多个,即图4(1)及(2)中每个虚线框内均包括多个实心圆点,从而得到光斑较多且具有特征图案的第一出射散斑光束。由此可见,衍射光学元件13对光束的复制只改变光束的数量,而不改变单个光束的形状。
37.在一个具体实现中,仍然参阅图2,发射电路板14相对的两侧均形成有沿光源11光路的方向延伸的支撑部15,此种情况下准直元件12、衍射光学元件13相对的两侧均分别设置在两个支撑部15上。可以理解的是,本具体实现通过在发射电路板14相对的两侧均形成支撑部15的方式,将准直元件12、衍射光学元件13架设在发射电路板14上。进一步地,我们可以在支撑部15的内侧开设孔、槽等结构,并将准直元件12、衍射光学元件13相对的两侧均分别设置在两个支撑部15内侧的孔、槽等结构中,以实现对准直元件12、衍射光学元件13的加固;或者,我们还可以在支撑部15的内侧额外增设一些本领域内常用的夹持、固定结构,并通过这些夹持、固定结构实现对准直元件12、衍射光学元件13的加固。
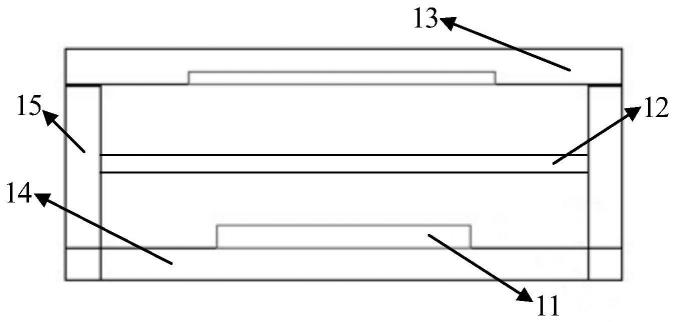
38.作为另一种实施方式,请参阅图5,图5为本技术实施例提供的发射器的另一种结构示意图。发射器10包括第一光源11、第二光源12、准直元件13、衍射光学元件14和发射电路板15,其中,第一光源11、第二光源12相互间隔设置于发射电路板15上,准直元件13和衍射光学元件14均架设于发射电路板14上,准直元件13和衍射光学元件14均位于两个光源的光路上,准直元件13位于两个光源与衍射光学元件14之间。在选用第一光源11、第二光源12时,可以选用eel(edge emitting laser,边缘发射激光器)、led(light-emitting diode,发光二极管)和vcsel(vertical-cavity surface-emitting laser,垂直腔面发射激光器)等一系列可发出红外波段的光学有源器件。可以理解的是,深度成像模式下第一光源11被点亮,其发射出的第一出射散斑光束的光斑较多且较为密集,构成了完整的特征图案;接近度传感模式下第二光源12被点亮,其发射出的第二出射散斑光束的光斑较少且较为稀疏,无法构成完整的特征图案,但是能够实现低功耗运行,足以满足近距离感测。
39.在本实施方式中,第一光源11用于在深度成像模式下向目标物体发射第一光束;第二光源12用于在接近度传感模式下向目标物体发射第二光束;准直元件13用于在深度成像模式下对第一光束进行准直以投射至衍射光学元件14,或在接近度传感模式下对第二光束进行准直以投射至衍射光学元件14;第一光束经过衍射光学元件14用以形成投射于目标物体的第一出射散斑光束,或第二光束经过衍射光学元件14形成形成投射于目标物体的第二出射散斑光束。
40.在一个具体实现中,深度成像模式下第一光源11发射的第一光束经由准直元件13准直后到达衍射光学元件14,衍射光学元件14对到达的第一光束进行复制从而形成第一出射散斑光束,并将所形成的第一出射散斑光束投射至目标物体;接近度传感模式下第二光源12发射的第二光束经由准直元件13准直后到达衍射光学元件14,衍射光学元件14对到达的第二光束进行复制从而形成第二出射散斑光束,并将所形成的第二出射散斑光束投射至
目标物体;此过程中虽然衍射光学元件14对第一光束和第二光束都进行了复制,但是复制的结果不同,即复制的结果使得第一出射散斑光束的视场角、光斑密度等均大于第二出射散斑光束。
41.在一个具体实现中,请参阅图6,图6为本技术实施例提供的衍射光学元件的结构示意图。衍射光学元件14包括第一衍射区域141和第二衍射区域142,其中,第一衍射区域141与第一光源11相对应,第二衍射区域142与第二光源12相对应。在本具体实现中,第一衍射区域141用于在深度成像模式下对第一光束进行复制以形成投射于目标物体的第一出射散斑光束;第二衍射区域142用于在接近度传感模式下对第二光束进行复制以形成投射于目标物体的第二出射散斑光束。对于第一衍射区域141的构成,其可以包括但不限于微纳结构和微透镜阵列;对于第二衍射区域142的构成,其可以包括但不限于微透镜阵列、微纳结构。
42.可以理解的是,深度成像模式下经由准直元件13准直的第一光束到达第一衍射区域141后,第一衍射区域141对到达的第一光束进行复制从而形成第一出射散斑光束,并将所形成的第一出射散斑光束投射至目标物体;接近度传感模式下经由准直元件13准直的第二光束到达第二衍射区域142后,第二衍射区域142对到达的第二光束进行复制从而形成第二出射散斑光束,并将所形成的第二出射散斑光束投射至目标物体,最终的复制结果就是第一出射散斑光束的视场角、光斑密度等均大于第二出射散斑光束。
43.在一个具体实现中,,因为第二光源12用于在接近度传感模式下发射光束,则第二光源12可以仅发射单个或几个斑点光束即可进行距离测量,则第二远射区域142可以不做任何特殊处理,即仅采用透明玻璃即可。或者可以对第二衍射区域142进行一些特殊的设计,使得第二衍射区域142对第二光束进行复制时仅保留中心区域的光束(比如仅保留图4(2)中处于中心位置的光场区域内的光束,而削弱其它8个光场区域内的光束),此时,投射到视场中仅具有零级衍射光束;或者,使得第二衍射区域142对第二光束进行复制时复制出的多个衍射级之间的间距减小(比如图4(2)中任意相邻的两个光场区域重叠),以减小第二出射散斑光束的视场角。
44.在一个具体实现中,仍然参阅图5,发射电路板15相对的两侧均形成有沿两个光源光路的方向延伸的支撑部16,此种情况下准直元件13、衍射光学元件14相对的两侧均分别设置在两个支撑部16上。可以理解的是,本具体实现通过在发射电路板15相对的两侧均形成支撑部16的方式,将准直元件13、衍射光学元件14架设在发射电路板15上。进一步地,我们可以在支撑部16的内侧开设孔、槽等结构,并将准直元件13、衍射光学元件14相对的两侧均分别设置在两个支撑部16内侧的孔、槽等结构中,以实现对准直元件13、衍射光学元件14的加固;或者,我们还可以在支撑部16的内侧额外增设一些本领域内常用的夹持、固定结构,并通过这些夹持、固定结构实现对准直元件13、衍射光学元件14的加固。
45.需要说明的是,上述两个实施方式仅作为本实施例的优选实现,其并非是对发射器10的具体构成的唯一限定;对此,本领域技术人员可以在本实施例的基础上,根据实际应用场景进行灵活设定。
46.作为一种实施方式,请参阅图7,图7为本技术实施例提供的采集器的结构示意图。采集器20包括采集芯片21、滤光元件23、采集镜头24和采集电路板25,其中,采集芯片21上设置有感光区域22,深度成像模式下第一反射散斑光束先后经过采集镜头24、滤光元件23
后到达采集芯片21上的感光区域22,接近度传感模式下第二反射散斑光束同样先后经过采集镜头24、滤光元件23后到达采集芯片21上的感光区域22。需要说明的是,图7中m为深度成像视场,n为接近度传感视场。
47.在本实施方式中,控制与处理器可以用于在深度成像模式下控制感光区域22的全部区域开启与发射器10形成第一探测通道以接收第一反射散斑光束,或在接近度传感模式下控制感光区域22的部分区域开启与发射器10形成第二探测通道以接收第二反射散斑光束。实际上,感光区域22内排布有大量像素,采集器20全部曝光指的是感光区域22内的所有像素都曝光,采集器20局部曝光指的是感光区域22内只有部分像素曝光,其余像素不曝光。
48.在一个具体实现中,请参阅图8,图8为本技术实施例提供的感光区域的结构示意图。感光区域22包括第一区域221和第二区域222,第二区域222由第一区域221的周缘向外延伸预设距离得到,此种情况下控制与处理器可以用于在深度成像模式下控制第一区域221及第二区域222开启与发射器10形成第一探测通道以接收第一反射散斑光束,或在接近度传感模式下控制第一区域221开启与发射器10形成第二探测通道以接收第二反射散斑光束。
49.需要说明的是,在接近度传感模式下,控制第一区域221内的像素单独曝光(增益可单独设置),此时第二反射散斑光束的光强较大,可调节像素增益降低。可以对第一区域221内每个像素的灰度值先做binning(是一种图像读出模式),将相邻像元感应的电荷加在一起并以一个像素的模式读出,即可以将第一区域221视为一个大像素,binning后的统计值对应的就是第二反射散斑光束的光强,通过该统计值的大小即可判断出有无物体接近,或判断出3d传感模组与目标物体之间的大致距离。
50.进一步地,第一区域221包括多个相互衔接的子区域2211,那么在接近度传感模式下控制与处理器可以控制至少一个子区域2211开启与发射器10形成第二探测通道以接收第二反射散斑光束。如此设计的优势就是功耗和视场角可自由配置,当功耗要求严格时,开启第一区域221中的少数子区域2211,其余子区域2211关闭;当视场角要求更大时,开启第一区域221中更多的子区域2211(甚至全部开启),以适应更大的视场角。此外,接近度传感视场划分时可不对应调整发射器10的发射视场,本身在接近度传感模式中所投射出的视场角就较小,则对发射器10做对应调整只是让反射的散斑光束入射到感光区域22内关闭的像素处,影响不大;或者,优选地,也可对应调控发射器10的发射视场。
51.需要说明的是,上述实施方式仅作为本实施例的优选实现,其并非是对采集器20的具体构成的唯一限定;对此,本领域技术人员可以在本实施例的基础上,根据实际应用场景进行灵活设定。
52.在一些实施例中,请参阅图9,图9为本技术实施例提供的3d传感模组的另一种结构示意图。3d传感模组采用双目结构光的形式,即是说采集器20包括两个,我们称这两个采集器20分别为第一采集器和第二采集器,此种情况下控制与处理器可以用于:在深度成像模式下控制第一采集器及第二采集器全局曝光与发射器10形成第一探测通道以接收第一反射散斑光束,并根据第一反射散斑光束生成目标物体的深度图像;或,在接近度传感模式下控制第一采集器和/或第二采集器局部曝光与发射器10形成第二探测通道以接收第二反射散斑光束,并根据第二反射散斑光束生成自身与目标物体之间的距离。
53.对于本实施例,当需要获取3d传感模组与目标物体之间的距离信息时,即3d传感
模组处于接近度传感模式时,可以开启并局部曝光第一采集器和第二采集器中的任何一个,也可以同时开启并局部曝光第一采集器和第二采集器,同时开启两个采集器20的目的是降低误报率。
54.此外,本技术实施例还提供了一种电子设备,该电子设备包括本技术实施例提供的前述3d传感模组。其中,电子设备可以包括但不限于机器人、手机、笔记本、平板电脑、pos机、车载电脑和智能穿戴设备。
55.需要说明的是,本技术内容中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。
56.还需要说明的是,在本技术内容中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
57.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本技术内容。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本技术内容中所定义的一般原理可以在不脱离本技术内容的精神或范围的情况下,在其它实施例中实现。因此,本技术内容将不会被限制于本技术内容所示的这些实施例,而是要符合与本技术内容所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1