一种3D检测的标定装置的制作方法
一种3d检测的标定装置
技术领域
1.本实用新型属于3d检测技术领域,尤其涉及一种3d检测的标定装置。
背景技术:
2.随着3d成像技术的发展,基于tof技术的深度相机逐渐成熟,在工业机器视觉检测中开始应用。目前,在涉及空间检测的应用技术方面,主要有激光雷达,激光光栅扫描,二维多目立体视觉合成等。这些技术具有检测精度高、系统复杂、价格昂贵、空间分辨率较低、运算复杂的特点,而基于tof技术的深度相机能够在高像素分辨率下,拥有较大的有效量程和快速同步测量的优势,在空间检测、工件姿态位置检测方面有巨大的优势。
3.目前公开的资料主要是对被检测物体的三维定量测量或定性分析。例如申请号为201610839304.6的发明专利公开了一种3d机器视觉空间检测标定方法,该专利说明书中公开了以下方法:一种3d机器视觉空间检测标定方法,步骤如下:(1)确定深度相机检测工位,使得空间检测区域在深度相机视场中心区域位置,深度相机轴线落在被检空间或被检物体或被检区域的几何中心;(2)在现场布设九个特征点,特征点的布设围绕深度相机轴线,且在水平方向上左右对称;(3)采集和记录特征点图像坐标和深度数据;通过重复采样和数字滤波以便得到更精准的数值,采集的同时需要保证深度相机位置的固定;(4)根据采集的特征点数值构建图像空间投影;(5)进行空间边界线校正拟合,采用非线性球面坐标转正交三维坐标的方法;(6)进行空间边界面校正拟合,采用非线性球面坐标转正交三维坐标的方法;(7)使用校正后的空间边界线和空间边界面完成虚拟空间构建,形成深度相机二维像素图像的空间检测模板;(8)在实时在线工作中,深度相机采样深度信息影像,与构建的空间检测模板进行比较或插值计算,可以快速而准确地完成空间机器视觉检测,实现对空间安全、空间定位、物体测量等功能。
4.上述发明专利公开的一种3d机器视觉空间检测标定方法中,步骤(2)在现场布设九个特征点,特征点的布设围绕深度相机轴线,其中所描述的特征点即对视觉空间的特征标定装置,能够被深度相机捕获采集和记录图像坐标和深度数据,然而申请人在实际应用中发现,特征点即对视觉空间的特征标定装置在对视觉空间3d检测过程中,多以粘贴的方式为主,该方式虽然便捷,但是难以拆卸,重复利用率交底,造成材料的浪费,增加了检测成本,为此,我们提出来一种3d检测的标定装置解决上述问题。
技术实现要素:
5.本实用新型的目的是为了解决现有技术中,特征点即对视觉空间的特征标定装置在对视觉空间3d检测过程中,多以粘贴的方式为主,该方式虽然便捷,但是难以拆卸,重复利用率交底,造成材料的浪费,增加了检测成本的问题,而提出的一种3d检测的标定装置。
6.为了实现上述目的,本实用新型采用了如下技术方案:
7.一种3d检测的标定装置,包括筒体,筒体顶部闭合,底部贯穿设置;
8.所述筒体表面套设有能够被深度相机捕获的标识圈,所述筒体顶部设置有固定机
构,所述固定机构包括活动贯穿筒体顶壁的提拉杆,所述提拉杆伸入筒体内的一端固定有活塞板,所述活塞板与筒体内壁贴合,所述筒体顶部边侧处设置有两对相互对称的安装块,每对安装块之间活动穿设有扣条,所述提拉杆朝向扣条的侧壁上等间距开设有多个齿槽,所述扣条朝向提拉杆的一端设置有卡齿,所述卡齿限制提拉杆伸入筒体内,每对所述安装块的一端均延伸出筒体外且共同穿设有转轴所述转轴活动贯穿扣条,且所述转轴的两端与安装块之间装配有扭簧。
9.通过上述技术方案,在进行3d空间检测时,筒体放置在视觉空间内预设标记点处,且筒体的底端与视觉空间的周壁抵接时,只需朝向筒体外部拉动提拉杆,迫使活塞板远离筒体接触的空间周壁,即可在活塞板与筒体内的空间周壁之间形成负压,将筒体吸附固定在视觉空间内的预设标记点处,使标识圈为深度相机提供图像坐标和深度数据。在提拉杆在拉动的过程中,扣条端部的卡齿在多个齿槽内跳动,当筒体吸附固定且提拉杆停止拉动时,卡齿便嵌入提拉杆上对应的齿槽内,限制提拉杆伸入筒体内,确保筒体吸附固定的稳定性,以确保标识圈能够为深度相机提供准确的图像坐标和深度数据。进一步的,视觉空间检测完毕后,提拉提拉杆的同时朝向筒体的一侧按压扣条远离提拉杆的一端,然后松开提拉杆,能够气压的作用下迫使活塞板朝向视觉空间周壁靠近,使活塞板两侧的气压平衡,筒体即可自动脱落。
10.优选的,所述提拉杆顶端设置有握柄。
11.优选的,位于所述活塞板和筒体内部顶壁之间的提拉杆上套设有复位弹簧。
12.通过上述技术方案,复位弹簧能够辅助活塞板朝向视觉空间周壁靠近。
13.优选的,所述安装块远离扣条的一侧设置有耳片,所述耳片与筒体螺栓连接。
14.通过上述技术方案,易于安装块和扣条的拆卸维修。
15.优选的,所述标识圈活动嵌套设在筒体上,所述筒体底端螺纹套设有挡圈,所述挡圈对标识圈下限位。
16.通过上述技术方案,当挡圈拆离筒体后,标识圈便可拆离筒体进行更换。
17.优选的,所述挡圈内壁底部设置有凸台。
18.通过上述技术方案,能够对筒体内部的活塞板下限位,当挡圈拆离筒体后,活塞板能够从筒体底端拆出。
19.优选的,所述挡圈的圈壁底面粘贴有橡胶圈。
20.通过上述技术方案,在筒体与所检测视觉空间周壁抵接时,提高筒体内的密封效果。
21.综上所述,本实用新型的技术效果和优点:
22.该3d检测的标定装置,通过将标识圈设置在筒体上,并在筒体上设置提拉杆和活塞板连接配合,在进行3d空间检测时,当筒体放置在视觉空间内预设标记点处,且筒体的底端与视觉空间的周壁抵接时,只需朝向筒体外部拉动提拉杆,迫使活塞板远离筒体接触的空间周壁,即可在活塞板与筒体内的空间周壁之间形成负压,将筒体吸附固定在视觉空间内的预设标记点处,使标识圈为深度相机提供图像坐标和深度数据,该安装方式方便快捷,有利于在所检测的视觉空间内快速完成特征点的布置,提高视觉空间的3d检测效率。
23.该3d检测的标定装置,通过在筒体上设置扣条以及扣条端部的卡齿,使卡齿与提拉杆上的齿槽配合限制提拉杆伸入筒体,在提拉杆在拉动的过程中,扣条端部的卡齿在多
个齿槽内跳动,当筒体吸附固定且提拉杆停止拉动时,卡齿便嵌入提拉杆上对应的齿槽内,限制提拉杆伸入筒体内,确保筒体吸附固定的稳定性,以确保标识圈能够为深度相机提供准确的图像坐标和深度数据,且视觉空间检测完毕后,只需提拉提拉杆的同时朝向筒体的一侧按压扣条远离提拉杆的一端,然后松开提拉杆,在复位弹簧与气压的作用下迫使活塞板朝向视觉空间周壁靠近,使活塞板两侧的气压平衡,筒体即可自动脱落,达到筒体的快速拆卸的目的,有利于该装置的重复使用,避免材料的浪费,降低检测成本。
附图说明
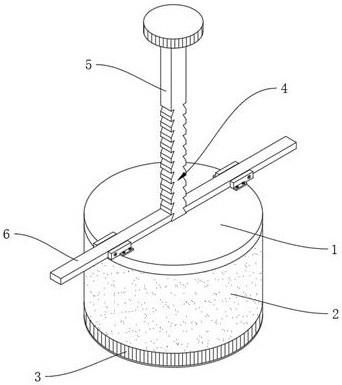
24.图1为本实用新型的整体结构示意图;
25.图2为本实用新型提拉杆的结构示意图;
26.图3为本实用新型扣条的结构示意图;
27.图4为本实用新型转轴的结构示意图;
28.图5为本实用新型的分解结构示意图。
29.图中:1、筒体;2、标识圈;3、挡圈;4、固定机构;5、提拉杆;6、扣条;7、活塞板;8、齿槽;9、握柄;10、复位弹簧;11、卡齿;12、安装块;13、转轴;14、耳片;15、扭簧;16、凸台;17、橡胶圈。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
31.实施例:
32.参照图1-图4,一种3d检测的标定装置,包括筒体1,筒体1顶部闭合,底部贯穿设置;筒体1表面套设有能够被深度相机捕获的标识圈2,具体的筒体1安装在所检测视觉空间内预设的标定点后,筒体1上的标识圈2能够被深度相机捕捉,为深度相机提供图像坐标和深度数据。
33.作为本实施例优选的技术方案,筒体1顶部设置有固定机构4,固定机构4包括活动贯穿筒体1顶壁的提拉杆5,提拉杆5伸入筒体1内的一端固定有活塞板7,活塞板7与筒体1内壁贴合,通过上述技术方案,在进行3d空间检测时,筒体1放置在视觉空间内预设标记点处,且筒体1的底端与视觉空间的周壁抵接时,只需朝向筒体1外部拉动提拉杆5,迫使活塞板7远离筒体1接触的空间周壁,即可在活塞板7与筒体1内的空间周壁之间形成负压,将筒体1吸附固定在视觉空间内的预设标记点处,使标识圈2为深度相机提供图像坐标和深度数据。
34.本实施例中,筒体1顶部边侧处设置有两对相互对称的安装块12,每对安装块12之间活动穿设有扣条6,提拉杆5朝向扣条6的侧壁上等间距开设有多个齿槽8,扣条6朝向提拉杆5的一端设置有卡齿11,当卡齿11插入齿槽8内时,即可限制提拉杆5伸入筒体1内,每对安装块12的一端均延伸出筒体1外且共同穿设有转轴13转轴13活动贯穿扣条6,且转轴13的两端与安装块12之间装配有扭簧15,具体的,扭簧15能够给予转轴13轴向驱动力,驱使扣条6朝向卡齿11的一端向下旋转;通过该技术方案,在提拉杆5在拉动的过程中,扣条6端部的卡齿11在多个齿槽8内跳动,当筒体1吸附固定且提拉杆5停止拉动时,卡齿11便嵌入提拉杆5
上对应的齿槽8内,限制提拉杆5伸入筒体1内,确保筒体1吸附固定的稳定性,以确保标识圈2能够为深度相机提供准确的图像坐标和深度数据。
35.进一步的,视觉空间检测完毕后,提拉提拉杆5的同时朝向筒体1的一侧按压扣条6远离提拉杆5的一端,然后松开提拉杆5,能够气压的作用下迫使活塞板7朝向视觉空间周壁靠近,使活塞板7两侧的气压平衡,筒体1即可自动脱落。
36.本实施例中,提拉杆5顶端设置有握柄9,用于提拉杆5的提拉操作,其中握柄9与提拉杆5螺纹套接,以便于拆分。位于活塞板7和筒体1内部顶壁之间的提拉杆5上套设有复位弹簧10,复位弹簧10能够辅助活塞板7朝向视觉空间周壁靠近。安装块12远离扣条6的一侧设置有耳片14,耳片14与筒体1螺栓连接,用于安装块12与筒体1的连接固定,同时易于安装块12和扣条6的拆卸维修。
37.作为本实施例优选的技术方案,标识圈2活动嵌套设在筒体1上,筒体1底端螺纹套设有挡圈3,挡圈3对标识圈2下限位,当挡圈3拆离筒体1后,标识圈2便可拆离筒体1进行更换,以便于匹配不同深度相机的信号获取方式。挡圈3内壁底部设置有凸台16,能够对筒体1内部的活塞板7下限位,当挡圈3拆离筒体1后,活塞板7能够从筒体1底端拆出。挡圈3的圈壁底面粘贴有橡胶圈17,在筒体1与所检测视觉空间周壁抵接时,提高筒体1内的密封效果。
38.工作原理:
39.在进行3d空间检测时,将筒体1放置在视觉空间内预设标记点处,且筒体1的底端与视觉空间的周壁抵接,此时只需朝向筒体1外部拉动提拉杆5,迫使活塞板7远离筒体1接触的空间周壁,即可在活塞板7与筒体1内的空间周壁之间形成负压,将筒体1吸附固定在视觉空间内的预设标记点处,而提拉杆5在拉动的过程中,扣条6在扭簧15的轴向弹力作用下,端部的卡齿11不断在多个齿槽8内跳动,当筒体1吸附固定且提拉杆5停止时,卡齿11便嵌入提拉杆5上对应的齿槽8内,限制提拉杆5伸入筒体1内,确保筒体1吸附固定的稳定性,以确保标识圈2能够为深度相机提供准确的图像坐标和深度数据。进一步的,视觉空间检测完毕后,只需提拉提拉杆5的同时朝向筒体1的一侧按压扣条6远离提拉杆5的一端,然后松开提拉杆5,在压力的作用下能够迫使活塞板7朝向视觉空间周壁靠近,复位弹簧10能够辅助活塞板7朝向视觉空间周壁靠近,使活塞板7两侧的气压平衡,筒体1即可自动脱落。
40.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1