一种用于无人机的多功能称重车的制作方法
1.本实用新型属于无人机固定称重装置的技术领域,具体涉及一种用于无人机的多功能称重车。
背景技术:
2.对无人机的机身进行试验时,需要转运无人机,并对无人机机身的重量进行准确称量。现有的无人机支架的功能单一,如固定支架仅能实现对无人机的机身进行支撑固定,无人机转运车仅能实现对无人机的转运,无人机称量设备仅能实现对无人机的机身重量进行称量。在进行无人机停放、转运、试车、称重的整体流程中,就需要配合吊具将无人机在各个装置之间进行频繁转运,耗时耗力。而且每次转运无人机后都需要对无人机的装载位置进行调节,大大增加了工作人员的工作量。因此,现在亟需一种能够一次性实现对无人机进行固定、短距离转运、定位试车、称重的一体化装置。
技术实现要素:
3.本实用新型的目的在于提供一种用于无人机的多功能称重车,能够对无人机的机身进行稳固固定、试车、称重、短距离转运。
4.本实用新型通过下述技术方案实现:
5.一种用于无人机的多功能称重车,包括车架,所述车架的底部设置有脚轮与支撑件,所述车架的顶部设置有机身连接支撑组件与机身称重组件,所述机身连接支撑组件包括支撑升降调节组件与机身连接滑块组件,所述机身连接滑块组件的底部与支撑升降调节组件的升降端连接,所述机身连接滑块组件的顶部与机身连接;所述机身称重组件包括称重升降调节组件与称重装置,所述称重装置的底部与称重升降调节组件的升降端连接,所述称重装置的顶部用于承接机身。
6.脚轮用于带动车架便捷移动,支撑件下放至地面时用于对车架进行定位固定。支撑升降调节组件用于对无人机的机身进行支撑并调节无人机机身的支撑高度,机身称重组件用于对无人机的机身进行称重。
7.需要支撑固定无人机的机身时,通过称重升降调节组件带动称重装置下降,使得称重装置的称重端不与机身接触并预留出足够机身连接支撑组件对机身进行升降支撑的空间。通过支撑升降调节组件带动机身连接滑块组件上升,使得机身连接滑块组件与机身连接,进而实现对机身的支撑固定。
8.需要对无人机的机身进行称重时,通过称重升降调节组件带动称重装置上升,使得称重装置的称重端与机身接触并对机身提供支撑。通过支撑升降调节组件带动机身连接滑块组件下降,使得机身连接滑块组件与机身分离。此时机身的重量完全作用在称重装置的称重端上,即可通过称重装置对机身重量进行称重。
9.为了更好地实现本实用新型,进一步的,所述机身连接滑块组件包括连接座、连接螺套、限位套筒、连接球头轴、滑块连接件,所述连接座的底部与支撑升降调节组件的升降
端连接,所述连接座的外侧螺纹套装有连接螺套,所述连接螺套的顶部设置有限位套筒,所述限位套筒的顶部设置有滑块连接件,所述滑块连接件与连接座之间设置有连接球头轴,所述连接球头轴的底端与连接座的顶部万向转动卡接,所述连接球头轴的顶端与滑块连接件的底部滑动卡接。
10.为了更好地实现本实用新型,进一步的,所述滑块连接件包括安装板、连接滑块、下压块、下压螺钉,所述安装板的底部与连接球头轴的顶端滑动卡接,所述安装板的顶部通过下压螺钉安装有下压块,所述下压块与安装板的顶部之间滑动设置有连接滑块。
11.为了更好地实现本实用新型,进一步的,所述支撑升降调节组件包括支撑升降螺杆、支撑升降螺套、支撑固定座,所述支撑固定座设置在车架的顶部,所述支撑固定座的内部螺纹转动设置有支撑升降螺杆,所述支撑升降螺杆外部转动套装有支撑升降螺套,所述支撑升降螺套上螺纹安装有将支撑升降螺杆的侧面顶紧的锁紧螺钉。
12.为了更好地实现本实用新型,进一步的,所述称重装置包括调平组件、称重传感器、机身对接装置,所述调平组件的底部与称重升降调节组件的升降端连接,所述调平组件的调平面上设置有称重传感器,所述称重传感器的顶部设置有机身对接装置。
13.为了更好地实现本实用新型,进一步的,所述调平组件包括连接座、调平座、升降调平顶头,所述连接座的底部与称重升降调节组件的升降端连接,所述连接座的顶部滑动设置有调平座,所述调平座与连接座之间设置有若干升降调平顶头。
14.为了更好地实现本实用新型,进一步的,所述机身对接装置包括限位座、万向轴承、对接件,所述限位座的底部与称重传感器的顶部螺纹连接,所述限位座的顶部设置有限位槽,所述限位槽中安装有万向轴承,所述万向轴承的顶部设置有对接件。
15.为了更好地实现本实用新型,进一步的,所述对接件包括滑块连接座或推力锥接头,所述滑块连接座与机身上的连接滑块对应连接,推力锥接头与机身上的推力锥对应连接。
16.为了更好地实现本实用新型,进一步的,所述称重升降调节组件包括称重升降螺杆、称重升降螺套、称重固定座,所述称重固定座设置在车架的顶部,所述称重固定座的内部螺纹转动设置有称重升降螺杆,所述称重升降螺杆外部转动套装有称重升降螺套,所述称重升降螺套上螺纹安装有将称重升降螺杆的侧面顶紧的锁紧螺钉。
17.为了更好地实现本实用新型,进一步的,所述车架的前端设置有牵引杆与系留链条。
18.本实用新型与现有技术相比,具有以下优点及有益效果:
19.(1)本实用新型通过在车架的顶部设置有若干机身连接支撑组件,通过机身连接支撑组件中的支撑升降调节组件调节对无人机机身的支撑高度,通过机身连接滑块组件与机身上的对接点进行对接,进而实现对无人机机身进行定位固定,实现无人机的固定停放以及定位试车功能;
20.(2)本实用新型通过在车架的顶部设置有若干机身称重组件,通过机身称重组件中的称重升降调节组件调节称重高度,并通过称重装置对无人机机身的重量进行准确称量,进而实现对无人机的机身进行称重作业;
21.(3)本实用新型通过在车架的底部设置脚轮与支撑件,进而实现车架带动无人机进行便捷短距离转运以及定位固定;
22.(4)本实用新型集无人机的停放、定位试车、短距离转运、称重功能于一体,避免了针对单独工况设置单独的装置的问题,大大提高了无人机测试效率。
附图说明
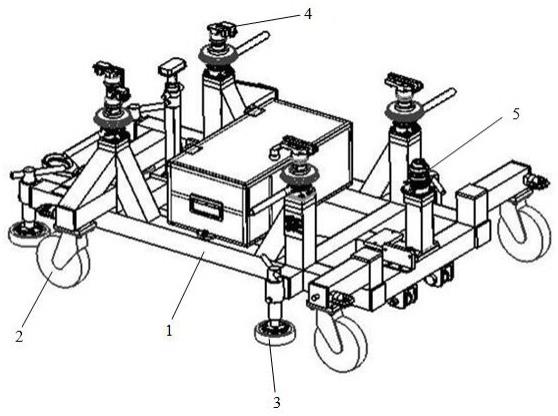
23.图1为本实用新型的立体结构示意图;
24.图2为机身连接支撑组件在车架上的安装示意图;
25.图3为车架的俯视图;
26.图4为机身称重组件在车架上的安装示意图;
27.图5为机身对接装置为滑块连接座的示意图;
28.图6为机身对接装置为推力锥接头的示意图;
29.图7为车架前端安装系留链条的示意图;
30.图8为支撑升降调节组件的结构示意图;
31.图9为称重升降调节组件的结构示意图;
32.图10为机身连接滑块组件的结构示意图;
33.图11为称重装置的结构示意图。
34.其中:1-车架;2-脚轮;3-支撑件;4-机身连接支撑组件;5-机身称重组件;41-支撑升降调节组件;42-机身连接滑块组件;51-称重升降调节组件;52-称重装置;411-支撑升降螺杆;412-支撑升降螺套;413-支撑固定座;421-连接螺套;422-限位套筒;423-连接球头轴;424-滑块连接件;4241-安装板;4242-安装板;4243-下压块;511-称重升降螺杆;512-称重升降螺套;513-称重固定座;521-调平组件;522-称重传感器;523-机身对接装置;5211-调平座;5212-升降调平顶头;5231-限位座;5232-万向轴承;5233-对接件。
具体实施方式
35.实施例1:
36.本实施例的一种用于无人机的多功能称重车,如图1-图4所示,包括车架1,所述车架1的底部设置有脚轮2与支撑件3,所述车架1的顶部设置有机身连接支撑组件4与机身称重组件5,所述机身连接支撑组件4包括支撑升降调节组件41与机身连接滑块组件42,所述机身连接滑块组件42的底部与支撑升降调节组件41的升降端连接,所述机身连接滑块组件42的顶部与机身连接;所述机身称重组件5包括称重升降调节组件51与称重装置52,所述称重装置52的底部与称重升降调节组件51的升降端连接,所述称重装置52的顶部用于承接机身。
37.车架1顶部前端中部以及车架1顶部后端两侧分别设置有三个安装立柱,三个安装立柱的顶部均通过连接螺栓安装有机身连接支撑组件4,三个机身连接支撑组件4构成三角形支撑区域以对无人机的机身进行稳固支撑。
38.车架1顶部前端两侧以及车架1顶部后端中部分别设置有三个称重立柱,三个称重立柱的顶部均通过连接螺栓安装有机身称重组件5,三个机身称重组件5构成三角形支撑称重区域以对无人机的机身进行稳固支撑并同时进行称重。
39.需要对无人机进行定位停放时,首先通过支撑件3将车架1定位固定,然后通过支撑升降调节组件41带动机身连接滑块组件42上升,通过称重升降调节组件51带动称重装置
52下降,使得机身连接滑块组件42与机身连接而使得称重装置52与机身分离,此时只有机身连接支撑组件4对机身进行支撑固定。同时,通过分别调节三个支撑升降调节组件41的支撑高度,使得三个支撑升降调节组件41的支撑高度一致,进而使得机身保持水平状态。同时针对机身的不同高度的支撑需求,如需要对机身进行检修时,则可以同步升高三个支撑升降调节组件41,进而提升对机身的支撑高度,以预留出足够的空间以供检修。
40.需要对无人机进行牵引移动时,将支撑升降调节组件41降低至最低支撑高度,进而降低机身的支撑重心,然后取消支撑件3对车架1的固定,然后通过牵引车对车架1进行牵引,即可通过脚轮2带动车架1与机身便捷稳固移动。为了保证牵引过程中机身的稳定性,牵引速度小于等于10km/h。
41.无人机需要称重时,通过支撑件3将车架1定位固定,同时保持机身连接滑块组件42对机身的支撑。然后通过称重升降调节组件51带动称重装置52上升,使得称重装置52的称重端与机身接触并对机身进行支撑,并将三个称重升降调节组件51的支撑高度调节一致使得机身保持水平状态后。通过支撑升降调节组件41带动机身连接滑块组件42下降至最低支撑高度,使得机身连接滑块组件42与机身分离不再支撑机身,此时机身的重量完全作用于称重装置52,通过称重装置52即可对机身进行称重。
42.称重装置52通过电缆与称重显示仪连接,称重显示仪先进行开机自检,自检成功后,显示对应的称重装置52的零点值,将称重装置52的称重端与机身对接之前,需要对三个称重装置52进行清零。
43.实施例2:
44.本实施例在实施例1的基础上做进一步优化,如图10所示,所述机身连接滑块组件42包括连接座、连接螺套421、限位套筒422、连接球头轴423、滑块连接件424,所述连接座的底部与支撑升降调节组件41的升降端连接,所述连接座的外侧螺纹套装有连接螺套421,所述连接螺套421的顶部设置有限位套筒422,所述限位套筒422的顶部设置有滑块连接件424,所述滑块连接件424与连接座之间设置有连接球头轴423,所述连接球头轴423的底端与连接座的顶部万向转动卡接,所述连接球头轴423的顶端与滑块连接件424的底部滑动卡接。
45.连接座的底部设置有带有连接孔的连接支耳,连接支耳通过连接销与支撑升降调节组件41的升降端连接。连接座的顶部设置有万向球窝,万向球窝与连接球头轴423的球头万向转动连接,万向球窝的开口顶部设置有盖板,盖板用于将连接球头轴423的球头限制在万向球窝的内部,避免连接球头轴423的球头从万向球窝中脱出,进而实现连接球头轴423的球头与连接座顶部的万向转动卡接。
46.连接座的外侧壁上设置有外螺纹,连接螺套421的螺纹孔与连接座的外侧壁上的外螺纹配合螺纹连接,同时在连接螺套421的顶部端面上设置有限位环槽,限位套筒422的底部端面与限位环槽配合连接。限位套筒422的顶部中心处设置有供连接球头轴423的轴段穿过的通孔,限位套筒422的顶部端面用于对滑块连接件424的底部进行支撑。同时,滑块连接件424的底部对应连接球头轴423的轴段设置有阶梯孔,阶梯孔的孔壁与连接球头轴423的轴段滑动配合连接,在连接球头轴423的轴段的顶端通过螺栓安装有限位垫片,限位垫片与阶梯孔的端面配合限位连接。滑块连接件424的顶部则对应机身上的连接孔位或连接销设置,直接与机身上的连接孔或连接销对接。
47.通过转动连接螺套421,使得连接螺套421向上顶升,进而通过连接螺套421向上顶升限位套筒422,进一步通过限位套筒422向上顶升滑块连接件424,使得滑块连接件424的阶梯孔沿着连接球头轴423的轴段向上滑动,直到滑动至阶梯孔的端面与限位垫片接触的极限位置时停止,即实现将滑块连接件424向上顶紧以消除安装间隙,避免滑块连接件424与机身连接时因安装间隙造成机身晃动。
48.本实施例的其他部分与实施例1相同,故不再赘述。
49.实施例3:
50.本实施例在上述实施例1或2的基础上做进一步优化,如图10所示,所述滑块连接件424包括安装板4241、连接滑块4242、下压块4243、下压螺钉,所述安装板4241的底部与连接球头轴423的顶端滑动卡接,所述安装板4241的顶部通过下压螺钉安装有下压块4243,所述下压块4243与安装板4241的顶部之间滑动设置有连接滑块4242。
51.安装板4241通过阶梯孔与连接球头轴423的轴段滑动卡接,安装板4241的顶部设置有滑槽,连接滑块4242的底部与滑槽滑动卡接。连接滑块4242的上方设置有下压块4243,下压块4243通过下压螺钉与安装板4241上的螺纹孔连接。连接滑块4242滑动至预定连接位置后,通过拧紧下压螺钉,使得下压块4243向下压紧连接滑块4242,以实现对连接滑块4242的固定。
52.本实施例的其他部分与上述实施例1或2相同,故不再赘述。
53.实施例4:
54.本实施例在上述实施例1-3任一项的基础上做进一步优化,如图8所示,所述支撑升降调节组件41包括支撑升降螺杆411、支撑升降螺套412、支撑固定座413,所述支撑固定座413设置在车架1的顶部,所述支撑固定座413的内部螺纹转动设置有支撑升降螺杆411,所述支撑升降螺杆411外部转动套装有支撑升降螺套412,所述支撑升降螺套412上螺纹安装有将支撑升降螺杆411的侧面顶紧的锁紧螺钉。
55.支撑升降螺套412的外侧面上设置有棘齿,棘齿与棘齿扳手啮合,通过棘齿扳手即可便捷带动支撑升降螺套412进行转动。需要调节支撑升降调节组件41的支撑高度时,转动锁紧螺钉,使得锁紧螺钉将支撑升降螺杆411的侧面顶紧,此时支撑升降螺杆411与支撑升降螺套412相当于一个固连的整体。然后即可通过棘轮扳手带动支撑升降螺套412进行转动,进而带动支撑升降螺杆411同步转动,由于支撑升降螺杆411与支撑固定座413上的螺纹孔螺纹配合连接,当支撑升降螺杆411转动时即进行竖直方向的升降,进而调节支撑高度。
56.本实施例的其他部分与上述实施例1-3任一项相同,故不再赘述。
57.实施例5:
58.本实施例在上述实施例1-4任一项的基础上做进一步优化,如图11所示,所述称重装置52包括调平组件521、称重传感器522、机身对接装置523,所述调平组件521的底部与称重升降调节组件51的升降端连接,所述调平组件521的调平面上设置有称重传感器522,所述称重传感器522的顶部设置有机身对接装置523。
59.调平组件521用于调节称重传感器522的称重面的水平度,使得称重传感器522的称重面保持水平状态,机身对接装置523则直接与机身上的连接孔、连接销、连接滑块、推力锥等部件直连。
60.本实施例的其他部分与上述实施例1-4任一项相同,故不再赘述。
61.实施例6:
62.本实施例在上述实施例1-5任一项的基础上做进一步优化,如图11所示,所述调平组件521包括连接座、调平座5211、升降调平顶头5212,所述连接座的底部与称重升降调节组件51的升降端连接,所述连接座的顶部滑动设置有调平座5211,所述调平座5211与连接座之间设置有若干升降调平顶头5212。
63.连接座的底部设置有带有连接孔的连接支耳,连接支耳通过连接销与称重升降调节组件51升降端连接。连接座的顶部设置有水平定位面,水平定位面上安装有水平基板。水平基板的中心处设置有螺纹孔,螺纹孔中螺纹安装有连接螺栓,调平座5211的顶部设置有供连接螺栓穿过的阶梯孔,阶梯孔的孔径大于连接螺栓的直径,预留出调平座5211的调节空间。水平基板的顶部位于连接螺栓的周围沿周向安装有至少三个升降调平顶头5212,升降调平顶头5212的顶升端与调平座5211的底部端面接触,通过调节升降调平顶头5212的顶升高度,进而将调平座5211调节至水平状态,进而保证称重结果的准确性,调平座5211的顶部则通过连接螺栓安装有称重传感器522。
64.本实施例的其他部分与上述实施例1-5任一项相同,故不再赘述。
65.实施例7:
66.本实施例在上述实施例1-6任一项的基础上做进一步优化,如图11所示,所述机身对接装置523包括限位座5231、万向轴承5232、对接件5233,所述限位座5231的底部与称重传感器522的顶部螺纹连接,所述限位座5231的顶部设置有限位槽,所述限位槽中安装有万向轴承5232,所述万向轴承5232的顶部设置有对接件5233。
67.称重传感器522的顶部设置有螺纹孔,限位座5231的通过螺柱与螺纹孔螺纹连接。限位座5231的顶部设置有限位槽,万向轴承5232配合安装在限位槽的内部,万向轴承5232的顶部则通过连接螺栓安装有对接件5233。
68.进一步的,所述对接件5233包括滑块连接座或推力锥接头,所述滑块连接座与机身上的连接滑块对应连接,所述推力锥接头与机身上的推力锥对应连接。
69.如图5所示,对接件5233包括滑块连接座,滑块连接座与机身上的连接滑块对应卡接;如图6所示,对接件5233包括推力锥接头,推力锥接头与机身上的推力锥对接。
70.本实施例的其他部分与上述实施例1-6任一项相同,故不再赘述。
71.实施例8:
72.本实施例在上述实施例1-7任一项的基础上做进一步优化,如图9所示,所述称重升降调节组件51包括称重升降螺杆511、称重升降螺套512、称重固定座513,所述称重固定座513设置在车架1的顶部,所述称重固定座513的内部螺纹转动设置有称重升降螺杆511,所述称重升降螺杆511外部转动套装有称重升降螺套512,所述称重升降螺套512上螺纹安装有将称重升降螺杆511的侧面顶紧的锁紧螺钉。
73.称重升降螺套512的外侧面上设置有棘齿,棘齿与棘齿扳手啮合,通过棘齿扳手即可便捷带动称重升降螺套512进行转动。需要调节称重升降调节组件51的支撑高度时,转动锁紧螺钉,使得锁紧螺钉将称重升降螺杆511的侧面顶紧,此时称重升降螺杆511与称重升降螺套512相当于一个固连的整体。然后即可通过棘轮扳手带动称重升降螺套512进行转动,进而带动称重升降螺杆511同步转动,由于称重升降螺杆511与称重固定座513上的螺纹孔螺纹配合连接,当称重升降螺杆511转动时即进行竖直方向的升降,进而调节支撑高度。
74.本实施例的其他部分与上述实施例1-7任一项相同,故不再赘述。
75.实施例9:
76.本实施例在上述实施例1-8任一项的基础上做进一步优化,如图7所示,所述车架1的前端设置有牵引杆与系留链条。
77.牵引杆的端部通过连接销与车架1前端的支耳铰接,牵引杆的另一端则与牵引车连接以实现对车架1的便捷牵引。
78.车架1的前端位于牵引杆的两侧分别设置有系留链条,无人机试车时,在无人机支撑固定的状态下,将一条系留链条的挂钩挂在牵引车尾端的起吊环上,将另一条系留链条与地面系留桩挂接,然后分别调节两根系留链条的长度,使得牵引车将两条系留链条拉直,进一步对车架1进行辅助固定。
79.本实施例的其他部分与上述实施例1-8任一项相同,故不再赘述。
80.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型做任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化,均落入本实用新型的保护范围之内。
81.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型做任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化,均落入本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1