一种扦样装置的制作方法
1.本实用新型涉及扦样技术领域,具体涉及一种扦样装置。
背景技术:
2.国家储备粮食(例如玉米、水稻、小麦、大豆等)在粮食储藏一定时间后,通常会通过扦样装置进行吸粮取样,将随机扦样的粮食样品加以检测,通过检测样品的含杂率、含水率、容重来验证粮食是否有异样。
3.粮食扦样时是通过扦样装置将扦样管下放到粮食深层,再将吸粮装置与扦样管相连产生负压进行吸粮。目前,现有的扦样装置主要采用对扦样管施加向下的压力进行下管扦样,对于深度较深处的粮食而言,由于粮堆深处的压力大,这就使得下管装置在下管时需要较大的配重进行下管。现有技术中也有通过电机驱动齿轮带动齿条上下移动,扦样管跟随齿条上下移动来进行下管,例如参见公开号为cn214316316u的专利文献。这种方式由于下管的力完全由电机的扭矩提供,而粮堆深处的压力大,因此需要较大功率的电机。对于上述两种扦样方式,扦样管受到的阻力大,下管的速度慢,导致作业效率低下。
技术实现要素:
4.本实用新型提供一种扦样装置,解决现有技术扦样管下放过程因受到的阻力大、下管速度慢而导致作业效率低下的技术问题。
5.本实用新型的采用的技术方案是:一种扦样装置,包括:
6.扦样箱;
7.旋转机构,旋转机构包括转动设于扦样座内部的空心转杆和用于驱动空心转杆转动的第一驱动部件,空心转杆的下端设有用于连接扦样管的连接头;扦样箱的顶部连接有转接管,转接管与空心转杆的上端连通,转接管连接有用于连接吸粮装置的连接软管;
8.升降机构,升降机构包括丝杠、导向杆和驱动丝杠转动的第二驱动部件,扦样箱与丝杠通过螺纹配合,且扦样与导向杆滑动连接,以在丝杠转动时带动扦样箱上下移动。
9.可选地,空心转杆下端侧壁设有环形凸台,环形凸台的侧壁设有环形凹槽,环形凹槽内沿圆周方向间隔设有若干弧型键,连接头的上端内壁与环形凸台的侧壁配合,且连接头的上端内壁设有与弧型键配合的环形键槽,连接头与弧型键通过紧固件连接;
10.连接头上方设有与环形凸台配合的连接环,连接环的下端与连接头上端卡接,以限制连接环与连接头之间的相对转动,环形凸台的上端沿圆周方向设有若干缺口,缺口内设有条型键,连接环的内壁设有与条型键配合的条型键槽,连接环与条型键也通过紧固件连接。
11.可选地,第一驱动部件包括涡轮、蜗杆和第一驱动电机,涡轮设于空心转杆的侧壁,蜗杆转动设于扦样箱的侧壁并与涡轮啮合,第一驱动电机安装于扦样箱的侧壁且其输出轴与蜗杆的一端连接。
12.可选地,第二驱动部件包括第一齿轮、第二齿轮和第二驱动电机,第二齿轮设于丝
杠的顶端,第一齿轮与第二齿轮啮合,第二驱动电机的输出轴与第一齿轮连接。
13.可选地,扦样箱的上方设有用于检测其位移距离的激光测距仪。
14.可选地,还包括用于锁紧扦样管的锁紧机构,锁紧机构靠近丝杠的下端设置,锁紧机构包括:
15.用于抱住扦样管的两锁紧臂,锁紧臂包括固定端和活动端,活动端被配置为可绕固定端转动;
16.转动杆,转动杆的侧壁设有两个连接臂;
17.两根连杆,两连杆各设于一个锁紧臂和与其相邻的连接臂之间,连杆的一端与锁紧臂的活动端铰接,连杆的另一端与相应的连接臂铰接,转动杆朝一个方向转动时,可通过连杆带动两锁紧臂的活动端绕固定端转动以锁紧扦样管;
18.复位部件,复位部件连接锁紧臂,以在松开转动杆后使锁紧臂复位。
19.可选地,锁紧机构还包括踏板和拉线,转杆的一侧设有摆臂,拉线的一端与摆臂连接,拉线的另一端与踏板连接,以在踩下踏板时使拉线拉动转动杆转动。
20.可选地,还包括用于感应锁紧臂处于复位状态的感应组件,感应组件包括光电开关和遮光片,光电开关固定设置,遮光片固设于其中一个锁紧臂上。
21.可选地,两锁紧臂的内侧固设有导向管。
22.可选地,锁紧臂的内侧设有锁紧块,锁紧块设有用于扦样管侧壁贴合弧形锁紧面,导向管的侧壁设有用于避让锁紧块的避让口。
23.本实用新型的有益效果是:本实用新型中,扦样箱与丝杠通过螺纹配合且与导向杆滑动连接,第二驱动部件带动丝杠转动时,可带动扦样箱下降,从而带动扦样管下放,由于扦样管通过连接头与旋转机构中的空心转杆连接,因此在扦样管下放过程中可通过第一驱动部件带动其跟随空心转杆转动,即本实用新型中扦样管下放过程同时旋转,类似于钻头钻孔的过程,大大减小了扦样管的下放阻力,便于增大下管速率,进而提高作业效率。
附图说明
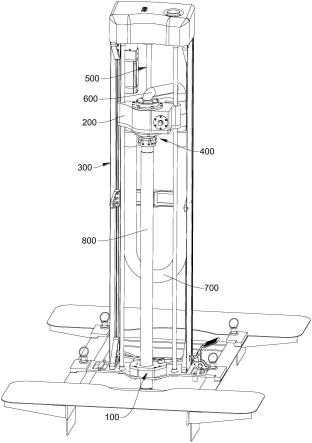
24.图1为本实用新型提供的一种扦样装置的结构示意图一。
25.图2为本实用新型提供的一种扦样装置的结构示意图二。
26.图3为扦样箱、转接管及旋转机构的连接结构示意图。
27.图4为扦样箱、转接管及旋转机构的连接结构剖视图。
28.图5为图4的a处放大图。
29.图6为空心转杆的结构示意图。
30.图7为锁紧机构的结构示意图。
31.图8为锁紧机构的部分(隐藏箱盖、拉线和踏板)结构示意图。
32.附图标记:100-锁紧机构,101-锁紧臂,1011-连接耳,1012-锁紧块,102-转动杆,1021-连接臂,1022-摆臂,103-连杆,104-复位部件,105-踏板,106-拉线,107-光电开关,108-遮光片,109-锁箱,1091-箱体,1091a-导向管,1092-箱盖,110-固定座,200-扦样箱,300-支撑架,400-旋转机构,401-空心转杆,401a-环形凸台,401b-环形凹槽,401c-缺口,402-涡轮,403-蜗杆,404-第一驱动电机,405-弧型键,406-连接环,407-条型键,408-连接头,500-升降机构,501-丝杠,502-导线杆,503-第一齿轮,504-第二齿轮,505-第二驱动电
机,600-转接管,700-连接软管,800-扦样管,900-激光测距仪。
具体实施方式
33.下面结合附图对本实用新型作进一步说明。
34.参考图1-2,一种扦样装置,包括扦样箱200、旋转机钩和升降机构500。
35.各部件通过支撑架300支撑,升降机构500包括丝杠501、导向杆和驱动丝杠501转动的第二驱动部件,丝杠501的两端与支撑架300的顶部和底部转动连接,导向杆的两端与支撑架300的顶部和底部固定连接,扦样箱200与丝杠501通过螺纹配合。具体地,扦样箱200的侧壁连接有螺母座,螺母座与丝杠501配合,同时,扦样箱200套设在导向杆上,与导向杆形成滑动连接。第二驱动部件包括第一齿轮503、第二齿轮504和第二驱动电机505,第二齿轮504设于丝杠501的顶端,第一齿轮503与第二齿轮504啮合,第二驱动电机505的输出轴与第一齿轮503连接,即第一驱动电机404的输出转速通过第一齿轮503和第二齿轮504传动作用于丝杠501,丝杠501的转动即可带动扦样箱200上下移动,第一驱动电机404还可连接减速器进行减速。
36.参考图3,旋转机构400包括转动设于扦样座内部的空心转杆401和用于驱动空心转杆401转动的第一驱动部件,扦样箱200的顶部连接有转接管600,转接管600与空心转杆401的上端连通,具体地,转接管600的底部设有连接法兰,扦样箱200的顶部固定连接有法兰座,连接法兰与法兰座固定连接并且密封良好,空心转杆401与法兰座之间设有轴用密封圈,保证密封性;转接管600连接有用于连接吸粮装置(图未示)的连接软管700,空心转杆401的下端设有用于连接扦样管800的连接头408,容易理解的是,吸粮过程中,吸粮装置产生负压,使粮食由依次经过扦样管800、空心转杆401、转接管600和连接软管700进入吸粮装置中,设置的连接软管700便于适应扦样箱200的上下升降。本实施例第一驱动部件包括涡轮402、蜗杆403和第一驱动电机404,涡轮402设于空心转杆401的侧壁,蜗杆403转动设于扦样箱200的侧壁并与涡轮402啮合,第一驱动电机404安装于扦样箱200的侧壁且其输出轴与蜗杆403的一端连接。
37.由于扦样箱200与丝杠501通过螺纹配合且与导向杆滑动连接,在第二驱动部件带动丝杠501转动时,可带动扦样箱200下降,从而带动扦样管800下放,由于扦样管800通过连接头408与旋转机构400中的空心转杆401连接,因此在扦样管800下放过程中可通过第一驱动部件带动其跟随空心转杆401转动,即本实用新型中扦样管800下放过程同时旋转(类似于钻头钻孔的过程),大大减小了扦样管800的下放阻力,便于增大下管速率,进而提高作业效率。
38.参考图3-6,本实施例中,连接头408的具体连接方式如下,空心转杆401下端侧壁设有环形凸台401a,环形凸台401a的侧壁设有环形凹槽401b,环形凹槽401b内沿圆周方向间隔设有若干弧型键405,连接头408的上端内壁与环形凸台401a的侧壁配合,连接头408呈上大下小的结构,内部呈沉孔结构,沉孔的底部与空心转杆401的底面贴合,可在贴合设置密封圈保证密封性(图未示);连接头408的上端内壁设有与弧型键405配合的环形键槽,容易理解的是,环形凸台401a侧壁上的环形凹槽401b可完全将弧型键405容纳其中,便于将连接头408由下往上套装在环形凸台401a的侧壁,再将连接头408与弧型键405通过紧固件(例如螺钉)连接,如此,弧型键405同时被环形凹槽401b的底侧和环形键槽的底侧支撑,即可限
制连接头408相对于空心转杆401的轴向移动。
39.进一步地,连接头408上方设有与环形凸台401a配合的连接环406,连接环406的下端与连接头408上端卡接,以限制连接环406与连接头408之间的相对转动,本实施例中,连接环406的下端和连接头408的上端设计成相互配合的花键形式,在本实用新型的其它实施例中,也可采用其他卡接形式来限制连接环406与连接头408之间的相对转动,例如,可在连接环406的底面设置若干卡块,连接头408的顶面设置与卡块一一配合的卡槽。环形凸台401a的上端沿圆周方向设有若干缺口401c,缺口401c内设有条型键407,连接环406的内壁设有与条型键407配合的条型键407槽,即条型键407同时卡在缺口401c和条型键407槽中,再将连接环406与条型键407通过紧固件(例如螺钉)连接,即可限制连接环406相对于空心转杆401圆周方向的转动,从而限制了连接头408的周向转动。由上可知,本实用新型通过限制连接头408的轴向移动和周向转动来与空心转杆401连接固定,同时进行扭矩传递。
40.连接头408的外壁设有密封管螺纹,扦样管800包括本体,本体的上端设有与上接头,上接头的内壁设有密封管螺纹,本体的下端设有下接头,下接头的外壁设有密封管螺纹,容易理解的是,上接头可与连接头408连接,一根扦样管800的上接头也可与另一根扦样管800的下接头连接。
41.本实施例还在支撑架300的底部设有用于锁紧扦样管800的锁紧机构100,在下管过程中,通过旋转机构400带动扦样管800旋转,同时升降机构500带动扦样箱200下移,从而使扦样管800下放到粮食中,到扦样箱200运动到下极限位置时,通过锁紧机构100锁紧扦样管800,旋转机构400反向转动同时升降机构500使扦样箱200上升,使连接头408与扦样管800脱离,扦样箱200上升到上极限位置时,在连接头408与插入到粮食中的扦样管800之间对接另一根扦样管800,重复上述步骤,直到将扦样管800下放到所需深度即完成下管,完成下管后即可启动吸粮装置进行吸粮。
42.本实施例扦样箱200的上方设有用于检测其位移距离的激光测距仪900,激光测距仪900安装在支撑架300的顶部,设置的激光测距仪900便于检测扦样箱200每次下降的距离,根据扦样管800的长度及扦样箱200每次下降的距离,即可计算出扦样管800下放到粮食中的深度。
43.此外,由于两根扦样管800之间通过密封管螺纹连接,扦样管800的上接头与连接头408也通过密封管螺纹连接,在添加另一跟根扦样管800过程中,需要使插入到粮食中的扦样管800与另一根扦样管800或连接头408之间发生相对转动来松开螺纹或紧固螺纹,若插入到粮食中的扦样管800无法固定会导致在添加另一跟根扦样管800时两根扦样管800对接不便,费时费力,进而导致加管过程效率低下,而本实施例设置的锁紧机构100能够在加管过程中将插入到粮食中的扦样管800锁紧固定,很好地解决了上述问题。
44.参考图7-8,具体地,锁紧机构100包括锁紧臂101、转动杆102、连杆103和复位部件104。本实施例中,锁紧机构100安装在锁箱109内,锁箱109包括箱体1091和箱盖1092,实际应用中箱体1091固定在下管设备的底座上(参考图1、图2),锁紧臂101包括固定端和活动端,两锁紧臂101的固定端通过转轴转动设置在锁箱109内,活动端可绕固定端转动,锁紧臂101设置有两个,两个锁紧臂101共同作用从而抱住或松开扦样管800。转动杆102转动设置在箱体1091的底部和箱盖1092之间,转动杆102的侧壁设有两个连接臂1021;连杆103也设有两根,两连杆103各设于一个锁紧臂101和与其相邻的连接臂1021之间,连杆103的一端与
锁紧臂101的活动端铰接,连杆103的另一端与相应的连接臂1021铰接。参考图2,其中一根连杆103长,另一个连杆103短,容易理解的是,连杆103的长短以及与相连的锁紧臂101之间的夹角根据锁紧臂101需要转动的角度来设置。
45.当下管时,锁紧臂101松开扦样管800,当扦样杆下降到粮食中一定深度后,需要添加另一根扦样管800以下到粮食更深处时,将转动杆102朝一个方向转动,转动杆102的转动通过连杆103带动两锁紧臂101的活动端绕固定端转动从而将下降到粮食中的扦样管800锁紧,避免在拧动添加的扦样管800将两根扦样管800对接时插入到粮食中的扦样管800发生转动甚至位移,而且无需手动固定插入到粮食中的扦样管800,使得对接添加扦样管800更加方便,省时省力,提高了作业效率。
46.复位部件104连接锁紧臂101,以在松开转动杆102后使锁紧臂101复位,具体地,本实施例复位部件104为弹簧,两锁紧臂101靠近固定端处均设有连接耳1011,复位部件104的一端与其中一个连接耳1011连接,复位部件104的一端与另一个连接耳1011连接,可在弹簧的两端设置挂钩,连接耳1011处设置挂杆,挂钩钩在相应的挂杆上。工作中,当两锁紧臂101转动将扦样管800锁紧时,弹簧被拉伸,在松开转动杆102后,弹簧收缩并带动两锁紧杆复位。在本实用新型的其它实施例中,弹簧也可设置在其他位置,例如可在两锁紧臂101的活动端与箱体1091的侧壁之间各设置一个弹簧,同样可实现相同的目的。
47.此外,在本实用新型的其它实施例中,复位部件104也可表现为其他形式,例如活塞与活塞筒的形式,进一步地,也设置与本实施例相同的连接耳1011,活塞通过活塞杆与其中一个连接耳1011铰接,活塞筒与另一个连接耳1011铰接,两锁紧臂101转动锁紧扦样管800时,拉动活塞使活塞与活塞筒底壁之间的密闭空腔体积变大产生负压,当松开转动杆102后,负压使得活塞复位从而拉动锁紧臂101复位,容易理解是,也可将活塞与套筒连接在锁紧臂101活动端与箱体1091的侧壁之间。
48.本实施例还设有用于感应锁紧臂101处于复位状态的感应组件,感应组件包括光电开关107和遮光片108,光电开关107固定设置,遮光片108固设于其中一个锁紧臂101上,值得说明的是,光电开关107可直接市面采购,其实利用被检测物对光束的遮挡或反射,从而检测物体的有无,光电开关107将输入电流在发射器上转换为光信号射出,接收器再根据接收到的光线的强弱或有无对目标物体进行探测。应用到本实施例中,当遮光片108处于光电开关107的发射器与接收器之间遮挡住光线时,光电开关107起作用,即感应到遮光片108时即代表锁紧臂101处于复位状态。值得说明的,如此设置,一方面便于判断在送开转动杆102后复位部件104是否工作,即便于知晓复位部件104是否失效从而及时更换,另一方面也避免复位部件104失效而导致添加扦样管800后再次下管时磨损扦样管800的侧壁。
49.在上述基础上,本实施例还设有踏板105和拉线106,转杆的一侧设有摆臂1022,拉线106的一端与摆臂1022连接,拉线106的另一端与踏板105连接,固定在下管设备的底座上,拉线106设置在线套中,线套的两端固定,使用时,踩下踏板105即可拉动拉线106,从而拉动摆臂1022使转动杆102转动,进而带动锁紧臂101转动。本实施例中,锁箱109的顶部设有固定座110,线套卡紧固定在固定座110上,踏板105设置在踏座上,线套的另一端卡紧固定在踏座上。值得说明的是,通过设置的踏板105,可将转动转动杆102的动作转换为踩踏踏板105的动作,使得操作更加简便。
50.本实施两锁紧臂101的内侧固设有导向管1091a,导向管1091a可与箱体1091一体
成型,箱体1091的底部和箱盖1092上均设有与导向管1091a直径相同的导向口,导向管1091a起到对扦样管800约束导向的作用,避免扦样管800轴线发生偏移,容易理解的是,导向管1091a和导向口的直径略大于扦样管800的外径,一般地,导向管1091a和导向口的直径大于扦样管800的外径0.5mm左右。
51.在上述基础上,锁紧臂101的内侧设有锁紧块1012,锁紧块1012设有用于扦样管800侧壁贴合弧形锁紧面,导向管1091a的侧壁设有用于避让锁紧块1012的避让口,即在锁紧扦样管800时,锁紧块1012伸入避让口内,通过两锁紧块1012与扦样管800侧壁贴合从而将扦样管800锁紧。
52.本实施例锁紧臂101内侧设有与锁紧块1012配合的卡槽,锁紧块1012与锁紧臂101通过螺钉连接,值得说明的是,如此设置可便于锁紧块1012的安装,而且设置的卡槽可限制锁紧块1012转动,安装时只需一颗螺钉即可将锁紧块1012固定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1