一种充电器外观缝隙检测设备及机床的制作方法
1.本实用新型涉及电子设备的外观缝隙检测设备,尤其涉及一种充电器外观缝隙检测设备及机床。
背景技术:
2.现有充电器外观检测目前,客户现场人工无法准确有效的识别产品拼合后的缝隙大小及瑕疵,经常会出现有瑕疵的充电器流出。采用人工方式检测效率慢、人工劳动强度大、成本高。
技术实现要素:
3.针对上述现有技术存在的技术问题。本实用新型提供一种充电器外观缝隙检测设备。包括产品辅助定位模块;直线运动模块,产品固定旋转拍照平台,拍照扫描模块。其中,所述直线运动模块安装于所述产品辅助定位模块下方,所述产品固定旋转拍照平台安装于所述产品辅助定位模块侧面,所述拍照扫描模块安装于所述产品固定旋转拍照平台的上方。
4.优选的,所述产品辅助定位模块包括滑动气缸,支架,支撑爪。所述支架本身的高度可调节,所述滑动气缸安设于所述支架上;所述支撑爪安装于所述滑动气缸侧面。
5.优选的,所述直线运动模块包括直线移动模组,中空旋转平台以及真空发生器。所述直线运动模块布设有轨道,所述中空旋转平台安装于所述直线移动模组上方,可与所述直线移动模组发生相对运动,所述真空发生器安装于所述直线移动模组上方,其位于所述中空旋转平台侧面。
6.优选的,所述产品固定旋转拍照平台包括感应器和产品治具,所述感应器安装于所述产品治具下方。
7.优选的,所述拍照扫描模块包括3d线扫激光单元,2d平面相机单元,扫描枪单元。其中所述2d平面相机单元安装于所述3d线扫激光单元侧面,所述扫描枪单元安装于所述3d线扫激光单元侧面。所述3d线扫激光单元、所述扫描枪单元以及所述2d平面相机单元依次设置。
8.优选的,所述3d线扫激光单元包括扫描相机、移动模块以及固定支架。所述扫描相机安装于所述移动模块侧面,所述固定支架,所述扫描相机和所述移动模块均安装于所述固定支架上。
9.优选的,所述2d平面相机单元包括安装板、固定座、对焦模组、相机以及镜头。其中所述安装板安装在所述固定座上方;所述对焦模组安装于所述安装板侧面;所述相机安装于所述对焦模组上方;所述镜头安装于所述相机侧面。
10.优选的,所述扫描枪单元包括扫码枪和安装架,所述扫码枪安装在所述安装架上。
11.本实用新型还提供一种充电器外观缝隙检测机床,其包括所述充电器外观缝隙检测设备和机体,其中所述充电器外观缝隙检测设备安装在所述机体上。
12.相较于现有技术,本实用新型提供的充电器外观缝隙检测设备。包括产品辅助定位模块;直线运动模块,产品固定旋转拍照平台,拍照扫描模块。其中,所述直线运动模块安装于所述产品辅助定位模块下方,所述产品固定旋转拍照平台安装于所述产品辅助定位模块侧面,所述拍照扫描模块,其安装于所述产品固定旋转拍照平台的上方。实现了将之前的多人目视检测降为了一人操作设备。并为后续规划自动化生产线做出了一定程度的基础。提高了生产效率、检测精度。
附图说明
13.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
14.图1是本实用新型揭示的充电器外观缝隙检测机床的结构图;
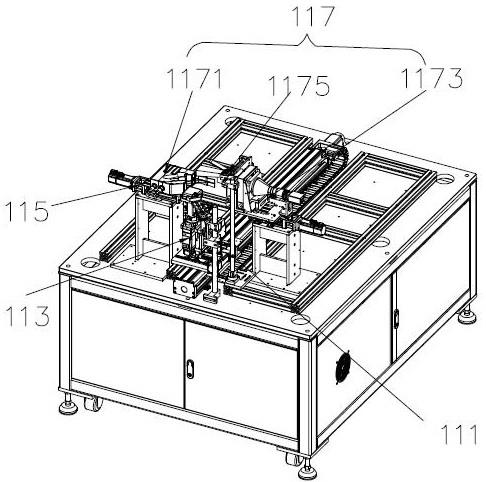
15.图2是如图1所示的充电器外观缝隙检测设备的结构图;
16.图3是如图2所示的产品辅助定位模块的结构图;
17.图4是如图2所示的直线运动模块的结构图;
18.图5是如图2所示的所述产品固定旋转拍照平台的结构图;
19.图6是如图2所示的3d线扫激光单元的结构图;
20.图7是如图2所示的2d平面相机单元的结构图;
21.图8是如图2所示的扫描枪单元的结构图。
22.附图标记:
23.10、充电器外观缝隙检测机床;11、充电器外观缝隙检测设备;13、机体;111、产品辅助定位模块;1111、滑动气缸;1113、支架;1115支撑爪;113、直线运动模块;1131、直线移动模组;1133、中空旋转平台;1135、真空发生器;115、产品固定旋转拍照平台;1151、感应器;1153、产品治具;117、拍照扫描模块;1171、3d线扫激光单元;11711、扫描相机;11713、移动模块;11715、固定支架;1173、2d平面相机单元;11731、安装板;11733、固定座;11735、对焦模组;11737、相机;11739、镜头;1175、扫描枪单元;11751、扫码枪;11753、安装架。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
25.请参阅图1和图2,所述图1是本实用新型提供的充电器外观缝隙检测机床10,图2是如图1所示的充电器外观缝隙检测设备11的结构图。所述充电器外观缝隙检测机床10包括充电器外观缝隙检测设备11和机体13,其中所述充电器外观缝隙检测设备安装在所述机体13上。需要说明的是,所述机体13可以是多种形式的,所述机体13所起到的作用是对所述充电器外观缝隙检测设备11进行固定,并提供支撑。二者之间可以是不可拆卸连接,也可以是可拆卸连接。只要是使得所述充电器外观缝隙检测设备11固定安装在所述机体13上的安
装方式均在本实用新型的保护之列。
26.所述充电器外观缝隙检测设备11包括产品辅助定位模块111、直线运动模块113、产品固定旋转拍照平台115以及拍照扫描模块117。其中所述直线运动模块113安装于所述产品辅助定位模块111下方,所述产品固定旋转拍照平台115安装在所述产品辅助定位模块111侧面,所述拍照扫描模块117安装于所述产品固定旋转拍照平台115的上方。
27.所述拍照扫描模块117包括所3d线扫激光单元1171,2d平面相机单元1173以及扫描枪单元1175。其中所述2d平面相机单元1173安装于所述3d线扫激光单元1171侧面,所述扫描枪单元1175安装于所述3d线扫激光单元1171侧面。所述3d线扫激光单元1171、所述扫描枪单元1175以及所述2d平面相机单元1173依次设置。
28.请参阅图3,图3是如图2所示的产品辅助定位模块111的结构图。所述产品辅助定位模块111包括滑动气缸1111,支架1113以及支撑爪1115。所述支架1113本身的高度可调节,所述滑动气缸1111安设于所述支架1113上;所述支撑爪1115安装于所述滑动气缸1111侧面。
29.请请阅图4,图4是如图2所示的直线运动模块113的结构图,所述直线运动模块113包括直线移动模组1131,中空旋转平台1133以及真空发生器1135。所述直线运动模块113布设有轨道,所述中空旋转平台1133安装于所述直线移动模组1131上方,可与所述直线移动模组1131发生相对运动,所述真空发生器1135安装于所述直线移动模组1131上方,位于所述中空旋转平台1133侧面。
30.请参阅图5,图5是如图2所示的所述产品固定旋转拍照平台115的结构图。所述产品固定旋转拍照平台115包括感应器1151和产品治具1153,所述感应器1151安装于所述产品治具1153下方。
31.请参阅图6,图6是如图2所示的3d线扫激光单元1171的结构图;所述3d线扫激光单元1171包括扫描相机11711、移动模块11713以及固定支架11715。所述扫描相机117111安装于所述移动模块11713侧面,所述固定支架11715,所述扫描相机117111和所述移动模块11713均安装于所述固定支架11715上。
32.请参阅图7,图7是如图2所示的2d平面相机单元1173的结构图,所述2d平面相机单元1173包括安装板11731、固定座11733、对焦模组11735、相机11737以及镜头11739。其中所述安装板11731安装在所述固定座11733上方;所述对焦模组11735安装于所述安装板11731侧面;所述相机11737安装于所述对焦模组11735上方;所述镜头11739安装于所述相机11737侧面。
33.请参阅图8,图8是如图2所示的扫描枪单元1175的结构图。所述扫描枪单元1175包括扫码枪11751和安装架11753,其中所述扫码枪11751安装在所述安装架11753上。
34.本实用新型提供的所述充电器外观缝隙检测设备11包括产品辅助定位模块111、直线运动模块113、产品固定旋转拍照平台115以及拍照扫描模块117。其中所述直线运动模块113安装于所述产品辅助定位模块111下方,所述产品固定旋转拍照平台115安装在所述产品辅助定位模块111侧面,所述拍照扫描模块117安装于所述产品固定旋转拍照平台115的上方。实现了将之前的多人目视检测降为了一人操作设备。并为后续规划自动化生产线做出了一定程度的基础。提高了生产效率、检测精度。
35.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是
利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1