三维数字显微镜的制作方法
本公开涉及一种获得三维物品的各部位的位置信息的三维数字显微镜的结构。
背景技术:
1、作为对物品的三维图像形状进行测定的装置,使用共焦激光显微镜(例如参照专利文献1)。共焦激光显微镜通过利用物镜使之聚光于一点的激光光对标本进行二维扫描,使所述反射光穿过配置于与物镜的焦点位置共轭的位置的针孔,而由光检测器接收。此种共焦激光显微镜以针孔阻断来自聚焦位置(焦点位置)以外的光的大部分,因此来自聚焦位置以外的光几乎未检测到亮度信息。共焦激光显微镜利用所述特性,使聚焦位置变化,由此获得物品的各高度的层析图像,通过图像处理由多个层析图像构建物品的三维图像,对物品的三维形状进行测定。
2、而且,公开有如下方法:经由显微镜利用电荷耦合(charge-coupled-device,ccd)照相机从左右两个方向拍摄固定于xy平台上的接合线,基于左右的图像数据算出接合线的三维坐标(例如参照专利文献2)。在专利文献2所记载的方法中,公开有如下内容:预先登录衬垫与引线的位置,在衬垫至引线之间设定包括导线的中心线的小区域,并从所述小区域中检测导线的轮廓,通过重复进行上述步骤,对导线的中心线的位置进行检测,并基于此生成导线的三维线图。
3、现有技术文献
4、专利文献
5、专利文献1:日本专利特开2011-2715号公报
6、专利文献2:日本专利特开平10-54709号公报
技术实现思路
1、发明所要解决的问题
2、另外,近年来,要求以高精度检测将半导体芯片的电极与基板的电极连接的全部导线的形状。
3、作为所述方法,也考虑如专利文献1所记载的使用共焦激光显微镜逐条测定导线的形状的方法。然而,在使用共焦激光显微镜的情况下,上下重叠的导线等难以进行图像识别及处理,而存在难以准确地测定全部导线的三维形状的情况。而且,由于难以将激光光的焦点准确地对焦于导线所使用的金等反射率高的物体,故而在将专利文献1所记载的共焦激光显微镜应用于导线的三维形状的测定的情况下,存在三维形状的测定精度降低的情况。
4、而且,导线的接合位置的信息包括基板的应变、半导体裸片的接合误差、打线接合的接合位置的误差等各种误差。因此,如专利文献2所记载那样,在基于预先登录的衬垫与引线的位置或连接点信息生成三维线图的情况下,误差大,难以高精度地检测导线的三维形状。
5、因此,本公开的目的在于在短时间内高精度地进行包括导线的多数物品的三维形状的测定。
6、解决问题的技术手段
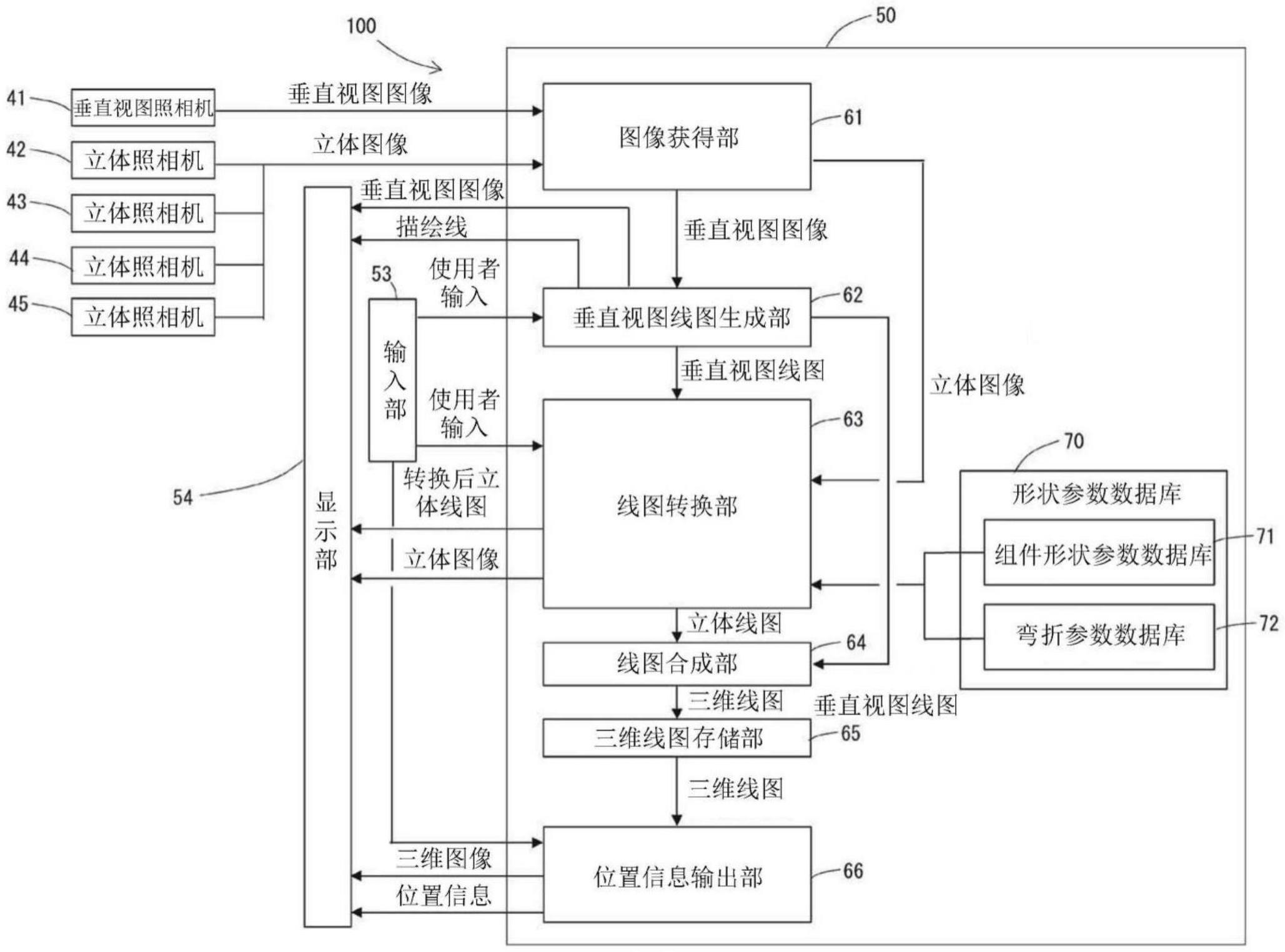
7、本公开的三维数字显微镜是能够获得三维物品的各部位的位置信息的三维数字显微镜,其特征在于包括:控制部,生成包括物品的各部位的位置信息的三维线图,控制部获得从垂直上方拍摄物品所获得的垂直视图图像、及从多个斜上方拍摄物品所获得的多个立体图像,提取物品的垂直视图图像中的轮廓线,生成物品的垂直视图线图,基于包括存储于存储部中的物品的高度信息的形状参数,将垂直视图线图分别转换为多个立体线图,重复执行形状参数的调整与垂直视图线图向各立体线图的转换直至转换后的各立体线图与各立体图像重叠为止,将所生成的垂直视图线图及与各立体图像重叠的各立体线图合成,生成包括物品的各部位的位置信息的三维线图,并输出所生成的三维线图中的各部位的位置信息。
8、如上所述,通过重复执行形状参数的调整与垂直视图线图向各立体线图的转换直至各立体线图与各立体图像重叠为止,而能够生成与各立体图像准确地拟合的各立体线图。由此,能够高精度地生成包括物品的各部位的位置信息的三维线图,而能够精度良好且高效地测定物品的各部位的三维形状。
9、在本公开的三维数字显微镜中,可为物品是包括多个组件及将各组件之间连接的多条导线的装置,控制部提取垂直视图图像中的各组件与各导线的各轮廓线,生成装置的垂直视图线图,形状参数为各组件距基准面的高度、各组件的表面的斜率、及各导线的弯折参数。
10、由此,能够高精度地生成包括多个组件及将各组件之间连接的多条导线的装置的三维线图,而能够精度良好且高效地测定物品的各部位的三维形状。
11、在本公开的三维数字显微镜中,可为包括:显示部,显示图像与线图;以及输入部,由使用者进行数据的输入,控制部将物品的垂直视图图像显示于显示部,将使用者操作输入部所描绘的垂直视图图像中的轮廓线生成为垂直视图线图,基于使用者从输入部输入的调整后的形状参数,进行垂直视图线图向各立体线图的转换,将转换后的各立体线图与各立体图像重合显示于显示部,重复执行上述步骤。
12、如上所述,由于将使用者描绘于显示部的垂直视图图像的轮廓线生成为垂直视图线图,故而即便为图像处理困难的垂直视图图像,也能够确实地生成垂直视图线图。而且,由于通过使用者的输入来调整形状参数,将转换后的各立体线图与各立体图像重合显示于显示部,故而使用者能够一边将转换后的各立体线图与各立体图像加以比较,一边调整形状参数直至两者重叠,而可生成使用者所期待的立体线图。由此,能够高精度地生成使用者所期待的物品的三维线图,能够精度良好且高效地测定物品的各部位的三维形状。
13、在本公开的三维数字显微镜中,可为物品是包括多个组件及将各组件之间连接的多条导线的装置,控制部将使用者操作输入部所描绘的垂直视图图像中的各组件与各导线的各轮廓线生成为装置的垂直视图线图,形状参数为各组件距基准面的高度、各组件的表面的斜率、及各导线的弯折参数。
14、由此,通过使用者输入少量参数,高精度地生成包括多个组件及将各组件之间连接的多条导线的装置的三维线图,能够精度良好且高效地测定物品的各部位的三维形状。
15、在本公开的三维数字显微镜中,可为控制部将三维线图显示于显示部,将使用者操作输入部所选择的三维线图的一个部位的位置信息显示于显示部。
16、由此,使用者能够一边观察显示于显示部的三维线图一边获得物品的各部的位置信息,而能够简便地对物品的各部位的三维形状进行测定。
17、在本公开的三维数字显微镜中,可为各导线在起点与终点之间分别具有多个弯折点,弯折参数为各导线所具有的各弯折点的各三维坐标位置,各弯折点的各三维坐标位置分别为由基准面的面内从导线的起点向终点延伸的长度方向轴、基准面的面内从导线的起点起沿着与长度方向轴正交的方向延伸的横向轴、及穿过起点而沿着与基准面垂直的方向延伸的高度方向轴所构成的坐标系中的长度方向坐标位置、横向坐标位置及高度方向坐标位置的组。
18、在利用多条导线将一组件与另一组件连接的情况下,由于各导线从起点起的上升与弯曲形状相同,故而多条导线中能够使用一个弯折参数将导线的垂直视图线图转换为立体线图。由此,能够通过使用者输入少量参数而精度良好地生成导线的三维线图,而能够精度良好且高效地测定各部位的三维形状。
19、在本公开的三维数字显微镜中,各弯折点的各三维坐标位置可包括三维比例坐标位置,所述三维比例坐标位置为和起点与终点之间的导线全长成比例的比例长度方向坐标位置、与导线全长成比例的比例横向坐标位置、及与导线全长成比例的比例高度方向坐标位置的组。
20、在起点所位于的组件、终点所位于的组件、及粗细程度共通的导线中,各导线的终点侧的弯折点的位置设定为与导线的全长成比例的位置。因此,通过规定相对于导线全长的比率作为弯折参数,能够规定全长不同的多条导线的终点侧的弯折点的位置。因此,能够通过使用者输入少量形状参数而规定包含于一组中的多条导线的形状。
21、在本公开的三维数字显微镜中,可为控制部将多条导线分组为包括起点所位于的组件、终点所位于的组件、及粗细程度共通的导线的多个组,并且提取垂直视图图像中的轮廓线,生成垂直视图线图,存储于存储部中的弯折参数包括各组分别规定的多个组别弯折参数,控制部基于各组别弯折参数,将各组所包括的各导线的各垂直视图线图分别转换为多个立体线图,重复执行各组的各组别弯折参数的调整与各组所包含的导线的各垂直视图线图向各立体线图的转换直至各组所包括的各导线的转换后的各立体线图与各组所包括的各导线的各立体图像重叠为止。
22、在本公开的三维数字显微镜中,可为控制部将多条导线分组为包括起点所位于的组件、终点所位于的组件、及粗细程度共通的导线的多个组,并且将使用者操作输入部所描绘的垂直视图图像中的各组件及各导线的各轮廓线生成为物品的垂直视图线图,存储于存储部中的弯折参数包括各组分别规定的多个组别弯折参数,控制部基于各组别弯折参数,将各组所包括的各导线的各垂直视图线图分别转换为多个立体线图,其后,基于使用者从输入部输入的调整后的各组别弯折参数,进行各组所包括的各导线的各垂直视图线图向各立体线图的转换,将转换后的各立体线图与各立体图像重合显示于显示部,重复执行上述步骤。
23、在起点所位于的组件、终点所位于的组件、及粗细程度共通的导线中,导线的形状类似。因此,通过将导线分组,而可通过使用者输入少量弯折参数生成与各导线的各立体图像拟合的各导线的各立体线图。
24、在本公开的三维数字显微镜中,可为分为一组的多条导线在起点与终点之间分别具有多个弯折点,组别弯折参数为分为一组的各导线所共通具有的各弯折点的各三维坐标位置,各弯折点的各三维坐标位置分别为由基准面的面内从导线的起点向终点延伸的长度方向轴、基准面的面内从导线的起点起沿着与长度方向轴正交的方向延伸的横向轴、及穿过起点而沿着与基准面垂直的方向延伸的高度方向轴所构成的坐标系中的长度方向坐标位置、横向坐标位置及高度方向坐标位置的组。
25、在起点所位于的组件、终点所位于的组件、及粗细程度共通的导线中,各导线从起点起的上升与弯曲形状相同。因此,在包含于一组中的导线中,可通过使用者调整一个组别弯折参数,而生成与各导线的各立体图像拟合的各导线的各立体线图。
26、在本公开的三维数字显微镜中,各弯折点的各三维坐标位置可包括三维比例坐标位置,所述三维比例坐标位置为和起点与终点之间的导线全长成比例的比例长度方向坐标位置、与导线全长成比例的比例横向坐标位置、及与导线全长成比例的比例高度方向坐标位置的组。
27、由此,能够通过使用者输入少量参数,而生成与各导线的各立体图像拟合的各导线的各立体线图。
28、发明的效果
29、本公开能够在短时间内高精度地进行包括导线的多数物品的三维形状的测定。
- 还没有人留言评论。精彩留言会获得点赞!