从无线信号确定移动设备的位置的制作方法
背景技术:
1、本发明涉及用于确定设备网络的移动设备的位置的方法、软件和装置。
2、已知通过在设备网络(其还可以包括一个或更多个静态设备)的移动设备之间发射声学或无线电信号来确定移动设备(例如rfid标签或手机)的位置,以便估计设备对之间的距离。可以使用诸如三边测量或模式匹配等技术来估计位置。然而,有效且可靠地做到这一点并不简单。
3、本发明寻求提供一种用于有效且可靠地确定移动设备的位置的创新方法。
技术实现思路
1、从第一方面,本发明提供了一种确定设备网络的一组一个或更多个移动设备中的每一个的各自位置的方法,该方法包括:
2、接收数据,该数据包括表示设备网络的相应设备对之间的距离的一组值,该值是从设备之间发射的无线信号确定的;
3、处理表示距离的值以确定线性方程组的一组系数;以及
4、求解线性方程组以确定表示一组一个或更多个移动设备中的每一个在二维平面或三维空间中的位置的二维或三维坐标。
5、从第二方面,本发明提供了用于确定设备网络中的一组一个或更多个移动设备中的每一个移动设备的相应位置的计算机软件,其中该计算机软件包括指令,该指令当由处理系统执行时,使得处理系统:
6、接收数据,该数据包括表示设备网络的相应设备对之间的距离的一组值,该值是根据在设备之间发射的无线信号确定的;
7、处理表示距离的值以确定线性方程组的一组系数;以及
8、求解线性方程组以确定表示一组一个或更多个移动设备中的每一个在二维平面或三维空间中的位置的二维或三维坐标。
9、从第三方面,本发明提供了一种包括处理系统和存储器的定位系统,其中,存储器存储包括指令的软件,该指令当由处理系统执行时,使得处理系统:
10、接收数据,该数据包括表示网络的相应设备对之间的距离的一组值,该值是从设备之间发射的无线信号确定的;
11、处理表示距离的值以确定线性方程组的一组系数;以及
12、求解线性方程组以确定表示一组一个或更多个移动设备中的每一个在二维平面或三维空间中的位置的二维或三维坐标。
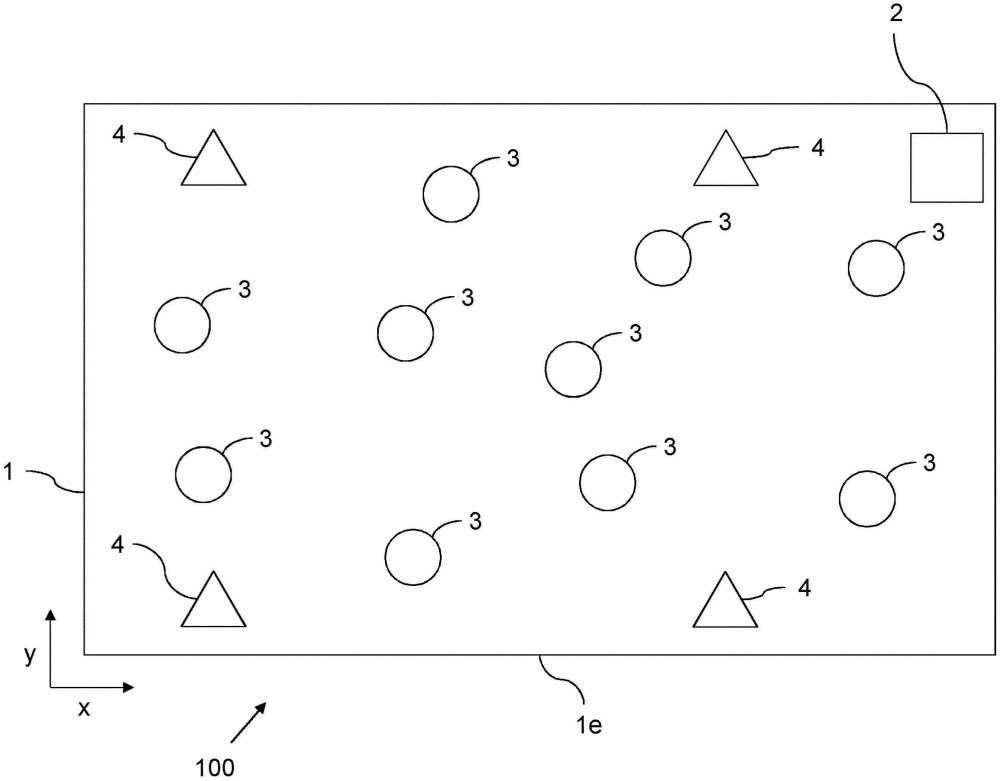
13、在一些实施例中,处理系统还可以包括设备网络,除了一个或更多个移动设备之外,设备网络还可以包括多个静态设备之一。
14、因此,可以看出,根据本发明的实施例,可以通过求解线性方程组来确定一个或更多个移动设备的二维(2d)或三维(3d)坐标。该方法基于这样的认识:一个或更多个设备的位置(被视为平面或三维空间中的坐标)可以由网络中其他设备的位置的线性组合的相容集来表示,从而导致设备位置之间的线性关系。这种线性使得能够求解线性方程组,以有效且相容地确定单个或多个设备的位置。它还可以有利地使得移动设备的位置能够被准确地确定,即使对于仅处于位置未知的其他设备的有效无线范围内的设备——即,即使当没有从该移动设备到固定或已知位置的设备(例如到静态信标或已知位置的移动设备)的直接距离测量可用时。
15、应当理解,在一些实施例中,坐标可以是表示一个或更多个移动设备中的每一个在二维平面中(例如对应于环境的平面视图)的相应位置的二维坐标(例如x,y)。然而,在一些实施例中,坐标可以是表示一个或更多个移动设备在三维空间(例如,包括高度信息)中的相应位置的三维坐标(例如,x、y、z)。
16、在一些实施例中,无线信号可以是无线电信号,例如bluetooth low energytm、wifitm或nfc信号。在一些实施例中,无线信号可以是声信号,例如超声信号。无线电信号和声信号的组合可用于确定表示距离的数据。在一些实施例中,移动设备中的一个或更多个可以是被配置为发送和接收无线信号的智能手机或电子标签。设备网络可以被布置为作为无线电网状网络进行通信。
17、在一些实施例中,可以基于在设备之间发射的无线信号的信号强度测量来确定表示网络的设备对之间的距离的数据。该数据可以基于无线信号的接收信号强度指示符(rssi)、到达角(aoa)测量、往返时间(rtt)测量、到达时间(toa)测量或到达时间差(tdoa)测量中的一个或更多个来确定。
18、rssi、aoa、rtt、toa和/或tdoa测量可以以任何适当的方式(例如通过过滤、平均或其他方式)进行处理,作为确定表示距离的数据的一部分,例如为了提高位置确定过程的准确性或质量。
19、处理系统可以包括网络服务器,网络服务器可以不同于网络的所述设备(即,其位置涉及线性方程组的设备)。然而,在其他实施例中,处理系统可以包括设备中的一个或更多个的处理器——例如,移动设备之一。
20、在一些实施例中,定位系统(即,测位系统)可以包括设备中的一个或更多个。它可以包括网络的全部所述设备。(然而,应当理解,在一些实施例中,这些设备可以是更大网络的一部分,包括未被包括在线性方程组中的其他设备——例如未接收到距离数据或接收的距离数据不足的设备。)它可以是实时定位系统(rtls)。
21、处理系统可以接收例如来自网络的一个或更多个设备的距离数据,或者它可以被配置为例如通过处理从网络的一个或更多个设备接收的测量数据(例如rssi值)而生成一些或全部距离数据。接收数据可以包括访问处理系统内的数据,例如从处理系统的存储器读取数据。
22、表示设备对之间的距离的值可以是噪声数据或近似数据。处理这些值以确定系数可以包括基于该组值中的噪声水平来缩放这些值。
23、线性方程组可以至少部分地由所述一组系数确定。该组系数可以包括设备网络的每对设备的相应系数(其可以是零值或非零值)。每个系数可以取决于和/或使用表示网络的相应设备对之间的距离的所述一组值中的一个或更多个来计算。在一些优选实施例中,每个系数是一组值中的一个或更多个值的相应线性组合。这可以确保线性方程组保持自相容并且可以找到解。
24、设备网络可以包括具有已知位置的一个或更多个设备——即,对于其,在求解线性方程组之前确定或接收二维或三维坐标。已知位置的一个或更多个设备可以包括移动设备和/或固定设备。已知位置可以是精确的或者可以是估计的。在一些实施例中,一个或更多个移动设备的位置可以使用其他测位手段(例如根据gps测量)来确定,或者可以已经确定。在一些实施例中,设备网络包括具有固定位置的一个或更多个设备,例如被配置为与移动设备交换无线信号的静态信标。在一些实施例中,设备网络包括一个或更多个移动设备,每个移动设备被配置为使用不使用在移动设备和所述设备网络的其他设备之间发射的无线信号的测位方法来确定移动设备的位置(其可以被用作“已知”位置)——例如使用全球导航卫星系统(gnss)。位置已知的设备可用于提供绝对位置参考,并且可用于确定具有未知位置的一个或更多个移动设备(即,具有通过求解线性方程组来确定的位置的设备)的组中的每一个的相应位置。具体地,位置已知的一个或更多个设备的相应二维或三维坐标可用于确定表示一个或更多个移动设备的组中的每一个的相应位置的二维或三维坐标——例如用于确定线性方程组的系数组和/或用于求解线性方程组。
25、在一些实施例中,该方法包括确定设备网络中的单个移动设备的位置。在一些实施例中,单个移动设备可以是设备网络中仅有的移动设备(即,其他设备具有固定位置)。然而,在一些实施例中,该方法包括确定设备网络的多个移动设备的位置。设备网络可以仅包括移动设备,或者除了一个或更多个移动设备的组之外还可以包括一个或更多个固定设备。
26、在确定二维坐标的实施例中,二维平面可以对应于设备网络所在的物理环境。它可以是水平面。二维平面可以对应于现实世界的二维视图或区域,其可以是室内环境,诸如建筑物的房间或地板。该方法可以包括使用所确定的2d坐标以识别环境中的一个或更多个相应的二维或三维位置,例如使得可以确定一个或更多个移动设备的组中的每一个在建筑物的房间内或地板上的位置。
27、在确定三维坐标的实施例中,三维空间可以对应于设备网络所在的物理环境。三维空间可以对应于现实世界中的三维体,其可以是室内环境,例如建筑物或整个建筑物的房间或地板。该方法可以包括使用所确定的3d坐标以识别环境中的相应位置,例如使得可以确定一个或更多个移动设备的组中的每一个在房间或建筑物内的位置。
28、可以输出一个或更多个2d或3d坐标或者对应于坐标的位置,例如作为网络上的数据或者在显示屏上可视地呈现的数据,例如在设备网络所在环境的地图或平面图上。定位系统可以包括用于显示表示一个或更多个所确定的坐标的数据的显示屏。
29、线性方程组可以包括与位置未知的设备的坐标相对应的多个变量。其还可以包括与位置已知的相应设备的坐标相对应的一个或更多个常数项(尽管这在所有实施例或情况中不是必需的)。
30、在确定二维坐标的一些实施例中,二维坐标可以被表示为复平面中的复数值。相应设备的二维坐标可以在线性方程组中通过复数值或复变量来表示。这可以允许使用有效的算法(例如通过查找复特征值)来求解线性方程组。
31、线性方程组可以是齐次的或非齐次的。例如,如果不存在已知位置的设备,则它可能是齐次的,而如果一个或更多个设备的坐标已知,则它可以是非齐次的。
32、线性方程组可以以任何适当的方式求解。在一些实施例中,求解线性方程组包括执行奇异值分解、或执行高斯消去、或执行下上(lu)分解。
33、该组系数可以被存储为表示方阵的数据。方阵可以包括针对设备网络中的每个设备的相应行和相应列。
34、在一些实施例中,求解线性方程组可以包括计算逆矩阵。在这样的实施例中,可以根据逆矩阵和向量的乘积来确定二维或三维坐标。在这样的实施例中,向量可以包括与网络的一个或更多个设备的已知位置对应的一个或更多个坐标。
35、在求解线性系统之前可以对该组系数进行过滤。它可以通过衰减来过滤——例如对于不满足包含条件的一对或更多对设备,减少或设置为零系数。包含条件可以指定或确定非零系数的最大数量,其可以取决于设备的数量或移动设备的数量(可选地除了取决于其他因素之外)。这可以允许去除设备对之间质量较差的距离数据,从而提高所确定的移动设备位置的准确性。在一些实施例中,至少一个系数被设置为零。通过减少线性方程组中非零项的数量,可以提高线性方程组的求解效率,—例如通过增加系统的矩阵表示的稀疏性。
36、在确定二维坐标的一些实施例中,确定该组系数可以包括对于至少一个或每个设备识别网络的一组或更多组三个另外的设备。优选地,其包括识别在二维平面中形成围绕所述设备的相应三角形的一组或更多组三个另外的设备。其可以包括在确定系数组时使用根据距离值确定的所述设备和三个另外设备之间的距离。确定系数可以包括执行双边测量过程(例如,与二维中的圆的交集相关)。它可以包括确定为所述设备确定的局部坐标系,以及确定表示三个另外的设备在所述局部坐标系中的位置的系数。
37、确定该组系数可以包括从线性方程组中排除所述设备与不是满足所述设备的几何过滤器的一组三个设备的一部分的任何另外的设备之间的距离。
38、在确定二维坐标的一些实施例中,设备的几何过滤器可以仅通过形成围绕该设备或接近该设备的三角形的三个另外设备的组——例如,其中,所述设备与三角形上的不围绕该设备的点之间的距离在阈值距离内。阈值距离可以基于所确定的三角形的设备对之间的距离的不确定性来确定。确定线性系统的系数可以包括应用基于海伦法则的几何过滤器。
39、在确定二维坐标的一些实施例中,可以通过从2d平面中的三角形的分析确定的方差来对线性系统中与形成三角形的设备的位置相关联的系数进行加权。这样的方差可以提供相对设备位置的不确定性的测量。在一些实施例中,可以基于由三个另外的设备形成的三角形的面积与由所述设备和三个另外的设备中的两个设备的每个相应子集形成的三个三角形的面积之和之间的比较,确定被三个另外的设备围绕的设备的方差。在一些实施例中,可以基于这样的方差排除形成围绕设备的三角形的一组或更多组三个设备。在一些实施例中,多组三个另外的设备可以按照方差来排序。在一些实施例中,当确定系数时,可以仅考虑按方差排序的达到阈值数量(例如前四名)设备组的设备组的距离值。在一些实施例中,对于每个设备,当识别形成围绕所述设备的三角形的三个设备组时,设备可以被限制为仅包括最多阈值数量(例如最多六个)的其他设备。可以通过偏爱具有已知位置和/或较低方差的设备来选择设备。
40、在确定三维坐标的一些实施例中,确定该组系数可以包括对于至少一个或每个设备识别网络的一组或更多组四个另外的设备。优选地,其包括识别在三维空间中形成围绕所述设备的相应四面体的一组或更多组四个另外的设备。其可以包括在确定系数组时使用根据距离值确定的所述设备和四个另外的设备之间的距离。确定该组系数可以包括执行三边测量过程(例如,相关三维球体的交集),该三边测量过程分别在每个这样组的四个另外设备的相应中完成。在一些实施例中,三边测量过程可以包括二维双边测量操作(例如,以确定另外的设备之一相对于另外的设备中的另外两个的2d位置)。它可以包括确定为所述设备确定的局部坐标系以及确定表示四个另外的设备在所述局部坐标系中的位置的系数。
41、在确定三维坐标的一些实施例中,确定该组系数可以包括从线性方程组中排除所述设备与不是满足所述设备的几何过滤器的一组四个设备的一部分的任何另外的设备之间的距离。在一些这样的实施例中,用于设备的几何过滤器可以仅通过形成围绕该设备或接近该设备的四面体的四个另外的设备的组——例如,其中,所述设备与四面体上不围绕该设备的点之间的距离在阈值距离内。阈值距离可以基于所确定的四面体的设备对之间的距离的不确定性来确定。
42、在确定三维坐标的一些实施例中,可以通过从三维空间中的四面体的分析确定的方差来对线性系统中与形成四面体的设备的位置相关联的系数进行加权。这样的方差可以提供相对设备位置的不确定性的测量。在一些实施例中,可以基于由四个另外的设备形成的四面体的体积与由所述设备和四个另外设备中的三个的每个相应子集形成的三个四面体的体积之和之间的比较,确定被四个另外的设备围绕的设备的方差。在一些实施例中,可以基于这样的方差排除形成围绕设备的四面体的一组或更多组四个设备。在一些实施例中,多组四个另外的设备可以按照方差来排序。
43、在一些这样的实施例中,当确定系数时,可以仅考虑按方差排序的达到阈值数量(例如前四名)设备组的设备组的距离值。在一些实施例中,对于每个设备,当识别形成围绕所述设备的四面体的四个设备的组时,设备可以被限制为仅包括最多阈值数量(例如最多六个)的其他设备。可以通过偏爱具有已知位置和/或较低方差的设备来选择设备。
44、更一般地,在一些实施例中,对于一组一个或更多个移动设备中的每个移动设备,线性方程组中与移动设备的位置相关联的非零系数的数量可以由预定最大阈值数量来限制—包含不超过6个非零系数,无论网络中移动设备的数量有多少。这可以使系统更有效地求解,并且如果较低质量的数据被排除,则可以提高准确性。
45、在确定二维坐标的一些实施例中,该方法仍然可以用于确定一组一个或更多个移动设备中的每一个在三维中的位置。确定第三坐标(例如,对应于高度或海拔高度)可以通过不同的机制来完成——例如,通过从更大的一组设备中选择一组一个或更多个移动设备,使用将全部设备限制在建筑物的同一楼层上的信号强度条件(然后可以为全部设备分配一个共同的高度值,对应于已知的地板高度)。在一些实施例中,其可以包括求解由该组系数确定的另一线性方程组,以确定表示该组的一个或更多个移动设备中的每一个在三维中的相应位置的三维坐标。
46、处理系统可以包括一个或更多个处理器。它可以包括单个处理设备—例如与移动设备位于同一环境中的工作站—或处理设备的网络—例如通过互联网访问的分布式云服务器。它可以包括用于存储数据和所述软件的存储器。它可以包括一个或更多个有线或无线网络接口。它可以包括显示器和/或其他输入输出外围设备。
47、本文中所描述的任何方面或实施例的特征可以在适当时应用于本文中所描述的任何其它方面或实施例。在参考不同的实施例或实施例集合时,应理解,这些实施例未必是不同的,而是可以重叠的。
- 还没有人留言评论。精彩留言会获得点赞!