基于Qt的雷达信号处理和数据处理系统及方法
本发明属于雷达信息处理领域,特别涉及一种基于qt的雷达信号处理和数据处理系统及方法。
背景技术:
1、近年来,随着雷达技术的不断发展,雷达系统的体积不断减小,但数据处理能力却大幅提升,这促使雷达的功能更全、性能更高。更高的性能带来的是对信号传输速率与信号存储容量更高的要求,雷达天线不断接收回波信号,需要实时进行雷达信号处理和数据处理,实现对目标的探测与跟踪,也需要实时对数据进行采集和存储。
2、目前雷达的信号处理和数据处理主要包括信号采样、数字滤波、数字下变频、数字波束形成、脉冲压缩、动目标检测、恒虚警、目标凝聚、点迹预处理、航迹起始、航迹关联、航迹消亡等过程,出于满足恶劣环境及保障人员安全需要,雷达信号处理和数据处理机往往并不与雷达天线等一体化设计。通常是由雷达天线接收雷达回波数据后,经过ad采样,将数字信号传输给信号采集板卡,实现数据的采集和存储,同时也传送至后方雷达信号处理和数据处理机完成雷达信息处理任务。
3、传统的fpga+dsp的雷达信息处理系统因受制作工艺、开发成本、功耗等因素的制约,性能提升有限。目前市面上雷达信号处理与数据处理系统大多是分开完成的,即分在了不同的处理器上执行,虽然可以提高一定的性能,但是会增加板卡尺寸、增大功耗、提高产品生产成本,而且需要额外设计不同处理器间的数据传输模块,增加了系统开发难度。
技术实现思路
1、本发明的目的在于提供一种基于qt的雷达信号处理和数据处理系统及方法,具有低复杂度、高准确性、高可靠性、高实时性以及适应性广等特点。
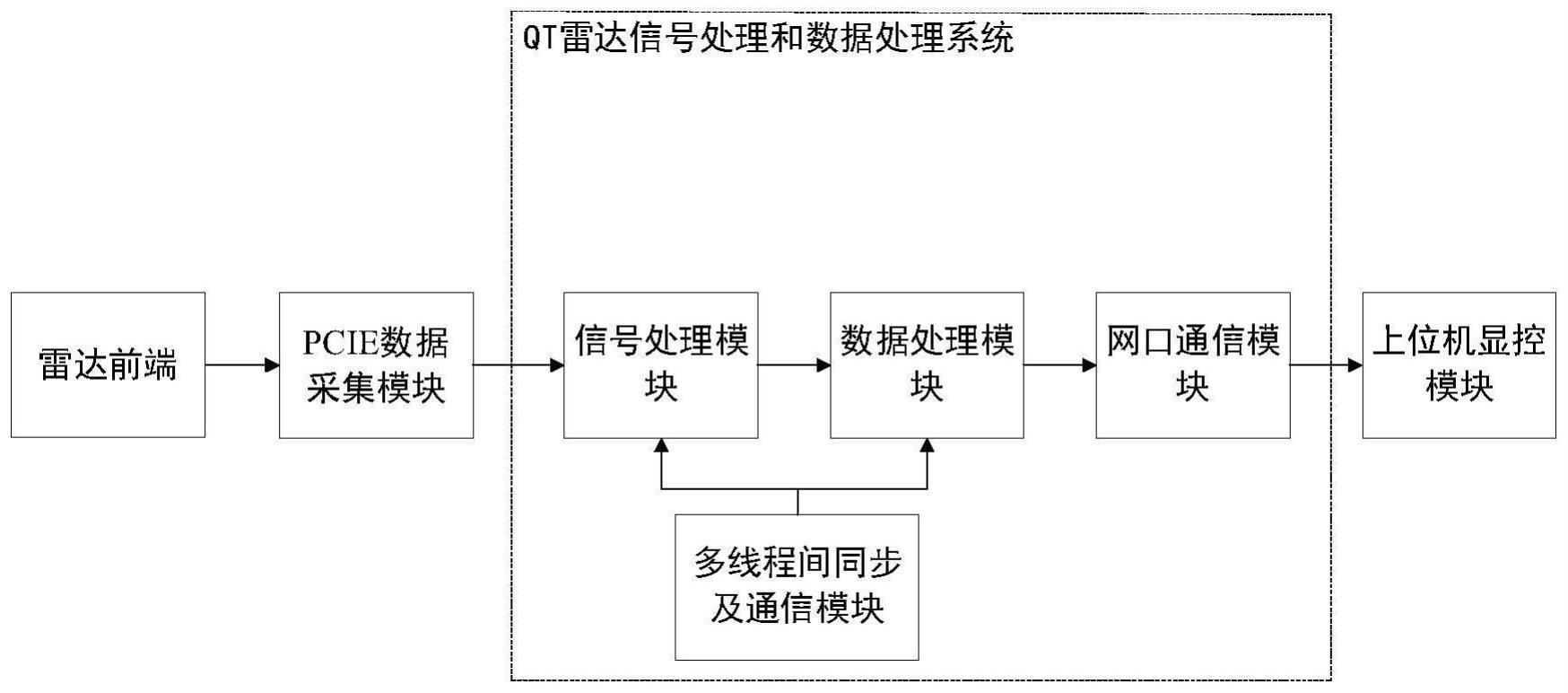
2、实现本发明目的的技术解决方案为:第一方面,本发明提供一种基于qt的雷达信号处理和数据处理系统,包括:pcie数据采集模块、多线程间通信模块、信号处理模块、数据处理模块、网口通信模块以及上位机显控模块;
3、所述pcie数据采集模块,用于将倒置后的单路串行数据通过乒乓结构的2组ddr3、金手指和服务器的pcie3.0插槽传输到服务器的内存中;
4、所述多线程间通信模块,用于实现qt不同处理线程间的信息同步和数据交互;
5、所述信号处理模块,用于对采集板卡传输的雷达原始ad数据经过波束形成、脉冲压缩、动目标检测mtd、恒虚警、点迹凝聚、测角处理,获得目标点迹信息,包括目标的距离、速度和方位;
6、所述数据处理模块,用于对信号处理后的点迹进行航迹处理获得目标航迹信息;
7、所述网口通信模块,用于实现程序与上位机之间的数据收发通信,包括雷达工作参数的获取、雷达回波信号处理结果与数据处理结果的发送;
8、进一步地,所述网口通信模块使用qt network模块来编写基于tcp/ip的网络通信程序。
9、进一步地,所述pcie数据采集模块包括:
10、双口ram,用于映射bar空间,使服务器和fpga板卡进行交互通信;
11、ddr模块,两组ddr组成乒乓结构,交替从fifo中取出数据,再送入xdma模块;
12、xmda模块,用于配置pcie3.0的参数,以及提供接口,使得数据通过金手指到pcie3.0插槽,再到服务器并最终传输到服务器内存中。
13、进一步地,所述多线程间通信模块使用qt信号与槽的机制实现,实现qt不同处理线程间的信息同步和数据交互。
14、进一步地,所述信号处理模块包括:
15、波束形成单元,用于在期望的角度方向获取增益,抑制干扰;
16、脉冲压缩单元,用于提取回波中的距离时延目标信息;
17、动目标检测单元,用于区分动目标和固定杂波信息;
18、恒虚警检测模块,用于保持信号检测时虚警率恒定;
19、目标凝聚模块,用于将恒虚警检测模块处理得到的目标信息凝聚为点迹信息;
20、测角模块,用于测量目标相对于雷达在方位和俯仰上的角度。
21、进一步地,所述数据处理模块包括:预处理单元、点迹与航迹关联跟踪单元、航迹终结单元和航迹起始单元;其中,
22、点迹预处理单元,用于剔除不在雷达处理范围内的点迹,且对相邻波位内的量测进行点迹的滑窗凝聚,并进行坐标系转换;
23、点迹与航迹关联跟踪模块,用于从信号处理模块获得的点迹中获取属于可靠航迹的点迹,同时利用该点迹更新可靠航迹,并将该点迹删除;
24、航迹起始模块,用于建立临时航迹,且对临时航迹进行关联跟踪,并将未与临时航迹关联上的点迹作为新的航迹头。
25、航迹消亡模块,用于删除超出雷达探测范围或航迹质量数低于预设门限的航迹。
26、进一步的,所述上位机显控模块,用于对信号处理和数据处理后得到的点航迹信息在界面上进行实时显示,并实时监控雷达工作状态和工作参数信息。
27、第二方面,本发明提供一种基于上述基于qt的雷达信号处理和数据处理系统的处理方法,包括以下步骤:
28、步骤1,信号处理模块通过服务器内存接收pcie数据采集模块采集到的雷达回波数据;
29、步骤2,信号处理模块对接收到的数据依次进行波束形成、脉冲压缩、动目标检测、恒虚警、目标凝聚以及测角处理,获得目标点迹信息,包括目标的距离、速度和方位角、俯仰角等信息;
30、步骤3,数据处理模块对信号处理后的点迹依次进行点迹预处理、航迹起始、点迹与航迹关联跟踪和航迹消亡处理,获得目标航迹信息;
31、步骤4,网口通信模块将步骤2获得的目标点迹信息和步骤3获得的目标航迹信息传输至上位机进行显示,完成雷达系统对目标的检测与跟踪;
32、在上述过程中,多线程间通信模块实现不同线程处理前的握手工作,各线程处理过程中的数据交互,以及最后处理完成的信息交互工作;
33、进一步地,步骤3所述数据处理模块对信号处理后的点迹依次进行点迹预处理、航迹起始、点迹与航迹关联跟踪、航迹消亡处理,获得目标航迹信息,具体过程包括:
34、步骤3-1,进行点迹预处理,具体是根据雷达的距离处理范围、速度处理范围,剔除不在所述处理范围内的点迹并进行坐标系转换;
35、步骤3-2,进行点迹与航迹关联跟踪,具体是从信号处理模块获得的点迹中获取属于可靠航迹的点迹,同时利用该点迹更新可靠航迹,并将该点迹删除;
36、步骤3-3,进行航迹起始处理,具体是建立临时航迹,且对临时航迹进行关联跟踪,并将未与临时航迹关联上的点迹作为新的航迹头;其中关联跟踪与步骤3-2的过程相同;
37、步骤3-4,进行航迹消亡处理,具体是删除超出雷达探测范围或航迹质量数低于预设门限的航迹;
38、进一步地,步骤3-2所述进行点迹与航迹关联跟踪的具体过程包括:
39、步骤3-2-1,计算点迹与每一条可靠航迹的统计距离;
40、步骤3-2-2,将统计距离小于预设距离的点迹作为可靠航迹的候选回波;
41、步骤3-2-3,筛选候选回波中统计距离最小的点迹;
42、步骤3-2-4,对统计距离最小的点迹与可靠航迹进行卡尔曼滤波,更新可靠航迹。
43、第三方面,本发明提供一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现第二方面所述的方法的步骤。
44、本发明与现有技术相比,其显著优点为:(1)本发明的多线程运行方案将接口通信、信号处理和数据处理集成在一个qt进程上执行,其中的每个线程处理不同的任务,满足雷达系统的高实时性要求,降低了系统处理时间和开发成本;(2)本发明的pcie数据采集模块,可以实现回波数据到服务器内存的搬移工作,极大的节省了数据传输时间,提高了系统运行的实时性;(3)本发明的信号处理模块,通过恒虚警、目标凝聚等一系列处理单元能有效抑制杂波及干扰,删除虚假点迹,进一步提高了目标信息的准确性和可靠性;(4)本发明的航迹处理模块,通过预处理、关联跟踪、航迹起始等一系列处理单元能对经信号处理后的若干扫描周期的量测集进行运动轨迹和相关参数的估计,形成稳定的目标航迹并预测下一时刻的位置,实现对运动目标高精度的实时跟踪;(5)本发明的网口通信模块,通过网口实现与上位机之间的通信,能够适应大批量高速数据传输场合。
45、下面结合附图对本发明作进一步详细描述。
- 还没有人留言评论。精彩留言会获得点赞!