VR投影镜头模组虚像组合分析式检测方法与流程
本发明涉及一种vr投影镜头模组虚像组合分析式检测方法。
背景技术:
1、vr眼镜100主要由vr投影镜头及vr屏幕组成,vr眼镜100需要模拟0.5米至无穷远的物距范围,物距范围大。vr眼镜100从制程上看:1.需要aa,以确保屏幕和vr投影镜头之间的距离(确定模拟距离如2米)及成像质量;2.vr眼镜100成像质量检测:检测模距离对应的成像质量。vr眼镜100的检测现有方法一般是:vr投影镜头放置于检测台上,通过工业相机和特殊的镜头组成人眼相机200在vr眼镜100出瞳位置来代替人眼获取图像(如图2所示),屏幕上的图像上设有若干个检测标记,通过分析中心运行的软件分析图像,主要依据是mtf数据图,判定图形的清晰状况,从而判定vr投影镜头与vr屏幕的位置装配是否符合要求。工业相机和特殊的镜头必须距离vr眼镜100很近,与人眼300到vr眼镜100的距离一样(如图1所示),这个距离很短,只有十几毫米,不利于vr眼镜的aa制程工艺;工业相机和特殊镜头组成人眼相机200的检测方法只能使用一台相机来检测整个vr投影像面,就是vr屏幕显示的图像均通过特殊的镜头投射到工业相机上,工业相机将图像传送到分析中心,然后通过分析中心运行的软件选取图像上的若干个包含检测标记的局部区域分析其清晰度而判断vr投影镜头及装配是否符合标准,上述检测方法具有如下缺点:因为要保证分辨率,因而整屏的图像像素数量巨大,从而对工业相机的要求也是非常高,从而造成成本高,而且上述图像数据传输给分析中心进行分析时,因为数据量大,数据传输耗时长。
2、因而有必要针对上述问题提出一种新的检测方法。
技术实现思路
1、为了克服现有技术的不足,本发明提供一种vr投影镜头模组虚像组合分析式检测方法,可以实现如下功能:
2、本发明解决其技术问题所采用的技术方案是:
3、vr投影镜头模组虚像组合分析式检测方法,其特征在于:包括分析中心、屏幕、vr投影镜头、检测架及设置于检测架上的若干vr检测系统,vr投影镜头放置于检测台上,vr检测系统包括工业相机及测试镜头模组,上述装置通过以下步骤进行检测:
4、步骤一:在检测用图像上设计若干检测标记,并将带有检测标记的图像输入屏幕,
5、步骤二:通过检测架调整每个vr检测系统的位置,使测试镜头模组通过vr投影镜头取到含有检测标记的局部图像,并投射到对应的工业相机上,
6、步骤三:所述工业相机将拍到的局部图像传输到分析中心,由分析中心进行分析比较,从而判断vr投影镜头是否符合标准。
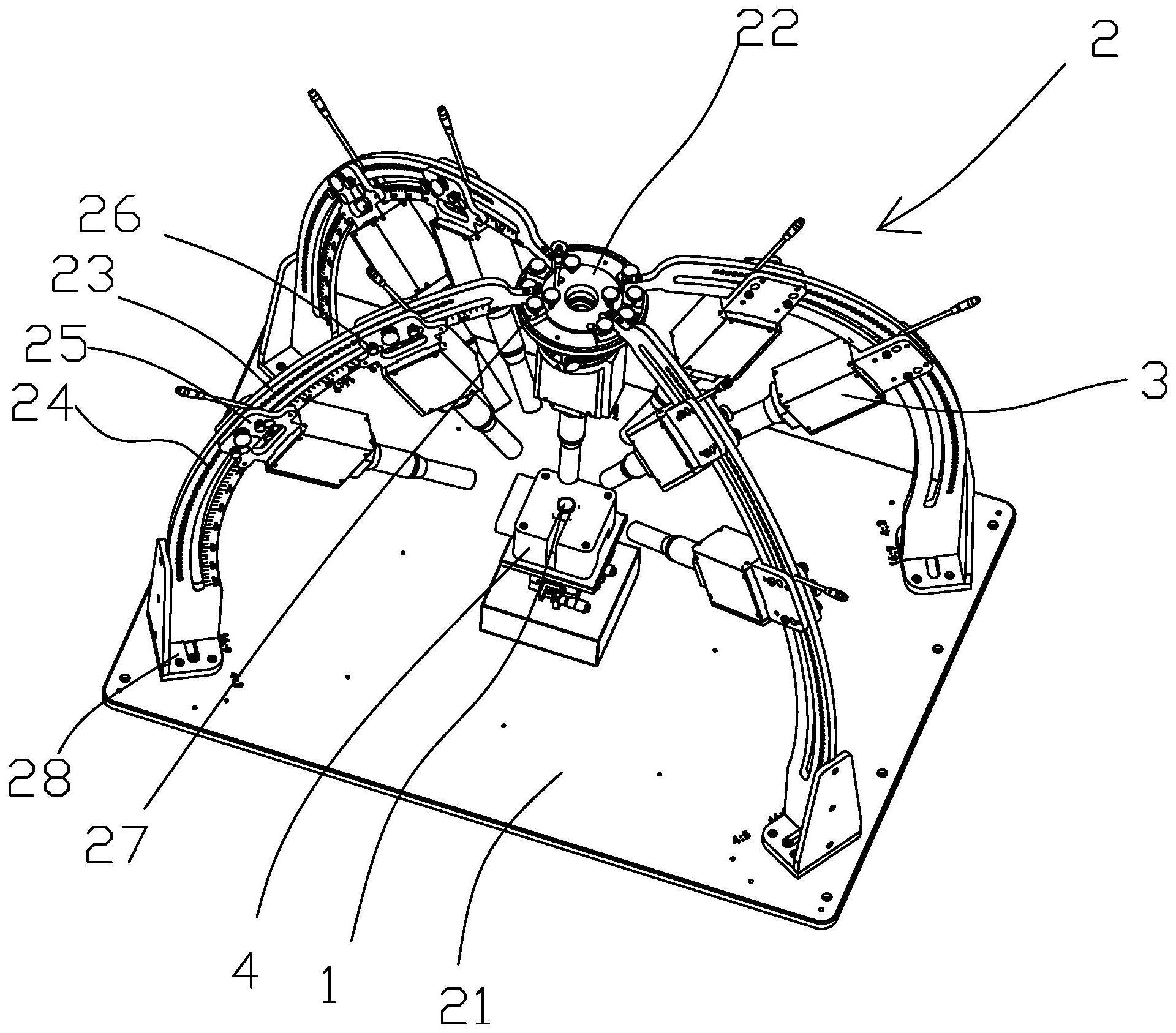
7、所述检测架包括底板、中心调节盘、若干弧形架板,所述弧形架板通过螺钉与中心调节盘及底板连接,且弧形架板上设有若干调节孔,所述vr检测系统上设有安装板,所述安装板通过螺纹手柄穿过对应的调节孔而与弧形架板锁固。
8、所述测试镜头模组包括沿光轴设置的对称光学系统及摄像光学系统,所述摄像光学系统通过对称光学系统、vr投影镜头取到含有检测标记的局部图像,并投射到对应的工业相机上。
9、所述对称光学系统包括镜片组一和镜片组二,所述镜片组一包括透镜一、透镜二、透镜三及透镜四,所述透镜组二包括透镜五、透镜六、透镜七及透镜八,所述透镜一与透镜八结构相同且相对于虚拟平面对称设置;所述透镜二与透镜七结构相同且相对于虚拟平面对称设置;所述透镜三与透镜六结构相同且相对于虚拟平面对称设置;所述透镜四与透镜五结构相同且相对于虚拟平面对称设置,所述虚拟平面位于镜片组一和镜片组二间的中心位置且与光轴垂直。
10、所述透镜一、透镜八为双凹透镜、所述透镜二、透镜四、透镜五、透镜七为双凸透镜、所述透镜三、透镜六为凸凹透镜,所述透镜一为负焦透镜且两面曲率值相等;所述透镜二为正焦透镜且曲率半径值小的面朝向vr投影镜头曲率半径值大的面朝向工业相机;所述透镜三为负焦透镜且凸面朝向vr投影镜头凹面朝向工业相机;所述透镜四为正焦透镜且曲率半径值大的面朝向vr投影镜头曲率半径值小的面朝向工业相机;所述透镜五为正焦透镜且曲率半径值小的面朝向vr投影镜头曲率半径值大的面朝向工业相机;所述透镜六为负焦透镜且凹面朝向vr投影镜头凸面朝向工业相机;所述透镜七为正焦透镜且曲率半径值大的面朝向vr投影镜头曲率半径值小的面朝向工业相机;所述透镜八为负焦透镜且两面曲率值相等。
11、所述透镜一折射率范围:1.55~1.75,色散系数范围:25~45,面一曲率半径:-110mm~-130mm,面二曲率半径:110mm~130mm;透镜二折射率范围:1.70~1.90,色散系数范围:35~55,面一曲率半径:50mm~70mm,面二曲率半径:-80mm~-100mm;透镜三折射率范围:1.70~1.90;色散系数范围:35~55,曲率半径:面一:40~60,面二:30~50;透镜四折射率范围:1.40~1.6;色散系数范围:70~90,曲率半径:面一:70~90,面二:-40~-60;透镜五折射率范围:1.40~1.6;色散系数范围:70~90,曲率半径:面一:40~60,面二:-70~-90;透镜六折射率范围:1.70~1.90;色散系数范围:35~55,曲率半径:面一:-30~-50,面二:-40~-60;透镜七折射率范围:1.70~1.90,色散系数范围:35~55,面一曲率半径:80mm~100mm,面二曲率半径:-50mm~-70mm;透镜八折射率范围:1.55~1.75,色散系数范围:25~45,面一曲率半径:-110mm~-130mm,面二曲率半径:110mm~130mm。
12、所述透镜一焦距:f=-90mm;透镜二焦距:f=45mm;透镜三焦距:f=-300mm;透镜四焦距:f=60mm;透镜五焦距:f=60mm;透镜六折焦距:f=-300mm;透镜七焦距:f=45mm;透镜八焦距:f=-90mm。
13、所述摄像光学系统包括透镜九、透镜十、透镜十一、透镜十二及透镜十三,所述透镜十一为双凹透镜、所述透镜九、透镜十二及透镜十三为双凸透镜,所述透镜十为平凸透镜,所述透镜九为正焦透镜且曲率半径值大的面朝向vr投影镜头曲率半径值小的面朝向工业相机;所述透镜十为正焦透镜且凸面朝向vr投影镜头平面朝向工业相机;所述透镜十一为负焦透镜且曲率半径值大的面朝向vr投影镜头曲率半径值小的面朝向工业相机;所述透镜十二为正焦透镜且曲率半径值大的面朝向vr投影镜头曲率半径值小的面朝向工业相机;所述透镜十三为正焦透镜且曲率半径值大的面朝向vr投影镜头曲率半径值小的面朝向工业相机。
14、所述透镜九折射率范围:1.60~1.80;色散系数范围:40~60,曲率半径:面一:45~65,面二:-5~-25;透镜十折射率范围:1.75~1.95;色散系数范围:10~30,曲率半径:面一:10~30,面二:平面;透镜十一折射率范围:1.50~1.70;色散系数范围:50~70,曲率半径:面一:-120~-140,面二:70~90;透镜十二折射率范围:1.55~1.75;色散系数范围:40~60,曲率半径:面一:90~110,面二:-60~-80;透镜十三折射率范围:1.40~1.60;色散系数范围:70~90,曲率半径:面一:40~60,面二:-20~-40。
15、所述透镜九焦距:f=10mm;透镜十焦距:f=20mm;透镜十一焦距:f=-80mm;透镜十二焦距:f=60mm;透镜十三焦距:f=40mm。
16、本发明的有益效果是:本发明的测试镜头模组通过vr投影镜头取到含有检测标记的局部图像,并投射到对应的工业相机上,然后所述工业相机将拍到的局部图像传输到分析中心,由分析中心进行分析比较,从而判断vr投影镜头是否符合标准。
17、上述方法不需要获取整屏的图像,因而对每台工业相机来说,大大降低了分辨率的要求,从而成本大大降低,即便是多台的总价也比之前一台的价格低,而且数据传输量也少,从而大大减少了数据传输时间,从而大幅提高测试效率。
- 还没有人留言评论。精彩留言会获得点赞!