一种基于组合导航和毫米波雷达的鬼影点滤除方法及系统
本发明属于目标识别领域,具体涉及一种基于组合导航和毫米波雷达的鬼影点滤除方法及系统。
背景技术:
1、毫米波雷达有较强的穿透烟雾灰尘等能力,能够适应大部分恶劣天气,可满足全天气候工作。然而由于毫米波雷达数据特性,其对于任何反射回足够强度波的物体,都可能生成一个对应目标。并且,有些目标点通常是在前后连续的几帧探测周期中,只出现一两次,对于这种目标点统称为“鬼影点”。而毫米波雷达每帧周期的数据中都或多或少的包含这类“鬼影点”,因此常常无法区分出有效的目标物。
2、现有技术暂没发现是如何解决。且关于毫米波雷达识别方面发表的文章,都为使用雷达进行场景识别以及人体生命特征检测。
3、现有技术中对于一些无效噪声点,有通过目标的回波强度来进行噪声点滤除。而在实际的道路上行驶时,噪声点与有效目标的回波强度往往不成规律性。根据对所采集的数据集回波的强度的观察,动态目标物的rcs是根据与毫米波雷达的距离远近而变化,并且噪声点以及有效目标物的rcs值范围跨度都很大,基本可视为处于同一变化区间。因此仅使用目标的回波强度值(rcs)来进行噪声点滤除是很局限的。而在本发明方法中,并不需要目标的回波强度值就可以进行鬼影点(噪声点)的滤除。
4、现有技术中还有基于生理活动引起的微小胸部位移作为人类存在的关键标志,使其提出的系统能够正确地识别具有多个移动目标的复杂环境中的人类,由于毫米波雷达的特性,其精度高于大多数的其他无线方法。但在日常生活中,运动的目标不仅仅有人类,还有各类车辆、动物、物体等,因此作者基于人体生命特征检测作为目标的识别方法并不具有通用性。并且,在大量运动的动态场景下,毫米波雷达不仅仅会探测到有效的目标,还会产生杂波和噪声,原始数据点密集且无特征,无法识别出有效的动态目标。
5、现有技术中有使用毫米波雷达作为道路特征的识别,毫米波雷达图像中对道路检测到的效果为一组亮点或斑点,作者通过引入一种称为条纹霍夫变换(ht)的方法来增强道路路径的几何特征提取,从而达到道路特征识别的目的。但在毫米波雷达实际检测的效果中,行人、车辆往往为一个或多个目标点,并且还存在这大量的噪声点,仅通过对毫米波雷达图像的特征是无法进行目标识别。
技术实现思路
1、要解决的技术问题:
2、为了避免现有技术的不足之处,本发明提供一种基于组合导航和毫米波雷达的鬼影点滤除方法及系统,首先对组合导航和毫米波雷达数据先进行融合,确定当前雷达相对于设定原点所处的位置,再对每帧周期的毫米波雷达数据中存在的鬼影点进行过滤,得到有效的目标物。该方法解决了因毫米波雷达探测到的“鬼影点”导致无法区分有效的目标物的问题。
3、本发明的技术方案是:一种基于组合导航和毫米波雷达的鬼影点滤除方法,其特征在于具体步骤如下:
4、步骤1:建立栅格表,设定栅格表的坐标原点为点o,起始点为点a;
5、步骤2:实时接收每一时刻组合导航和毫米波雷达的数据,对两个传感器数据进行时间配准,挑选出在误差范围内的两个传感器数据;
6、步骤3:对挑选出的组合导航和毫米波雷达数据进行数据融合,确定当前车辆在全局坐标系中的位置;
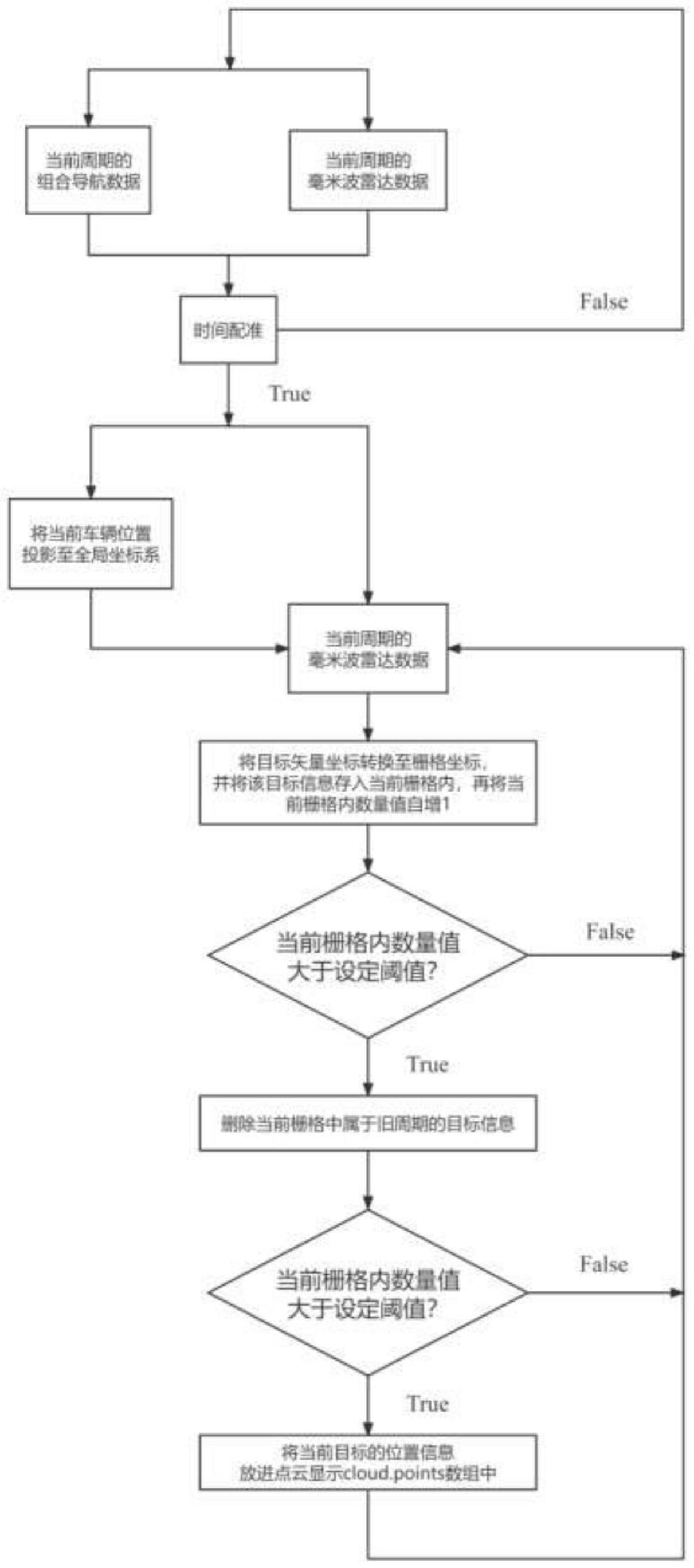
7、步骤4:对接下来该帧的毫米波雷达数据中,各目标出现的位置进行统计,并将各目标的信息存在事先初始化好的栅格表内;当栅格表中某个小栅格中的目标数量达到所设定的阈值时,即判定为是有效的目标物,放进输出队列。
8、步骤5:对输出队列中的目标数据进行pcl点云可视化显示。
9、本发明的进一步技术方案是:所述步骤1中,通过毫米波雷达探测到的目标所包含的位置信息为矢量坐标(x、y),将其投影到栅格表时需要将矢量坐标转换成栅格坐标(i、j);转换公式为:i=x/dx,j=y/dy,即将浮点型的x、y转换成整型i、j。
10、本发明的进一步技术方案是:所述步骤1中,对于设定的栅格表中,每个栅格能够存储多个不同目标的信息值;每个栅格存储的信息为:此栅格内的目标数量、各目标的矢量坐标(x、y)、各目标出现的时间。
11、本发明的进一步技术方案是:所述步骤2中,首先,选取毫米波雷达和组合导航,分别为德国大陆ars408雷达测量周期为72ms,组合导航数据发布频率为100hz;
12、然后,设定时间阈值t,假设在t1时刻毫米波雷达获取一帧的起始数据,在t2时刻组合导航获取一帧数据;如果|t1-t2|≤t,则判断两个传感器的数据为同一时刻的数据;如果|t1-t2|>t,则舍弃这两个传感器在该帧的数据;
13、最后,得到在误差范围内的两个传感器数据。
14、本发明的进一步技术方案是:所述步骤3中当前车辆在全局坐标系中位置确定的方法:
15、3.1根据组合导航提供的经纬度信息,更新当前车辆的经纬度信息;
16、3.2将当前车辆的经纬度转换至相对于所设定原点o的平面x、y坐标值(x车,y车)。
17、本发明的进一步技术方案是:所述步骤4中,具体方法为:
18、4.1遍历符合融合误差范围内的当前周期毫米波雷达所探测到的每个目标数据;
19、4.2结合当前车辆的位置信息,将每个探测到的目标位置(x目标,y目标)转换至相对于所设定原点o的绝对位置(x目标’,y目标’),即x目标’=x目标+x车;y目标’=y目标+y车;其中,(x目标,y目标)为目标相对于毫米波雷达的位置;(x目标’,y目标’)为目标相对于原点o的位置;
20、4.3将目标的横纵矢量坐标(x目标’,y目标’)转换值栅格坐标,并把矢量坐标值与出现的周期时间保存至当前位置的栅格内;
21、4.4当当前位置的栅格目标数量未达到阈值,则返回步骤4.2,遍历下一个目标的数据;达到设定阈值时再进行步骤4.5;
22、4.5对当前栅格进行旧周期判定,将所存储的目标信息进行遍历,删除目标出现的时间为旧周期的目标。
23、4.6再次进行步骤4.4的阈值判定,若当前位置的栅格目标数量依然大于设定阈值,则将该目标点放入点云输出队列,否则回到步骤4.2。
24、4.7重复4.2-4.6步骤,直到遍历完当前周期探测到的所有目标。
25、本发明的进一步技术方案是:所述步骤5中,以点云形式显示识别到的动态目标物。
26、一种鬼影点滤除系统,其特征在于:包括组合导航、毫米波雷达、usb相机、工控机和屏幕,通过组合导航采集载体的位置和速度信息,通过毫米波雷达采集目标的位置和速度信息,通过usb相机采集图像信息;
27、所述组合导航、毫米波雷达、usb相机所采集的信息传输至工控机,并通过屏幕查看和处理数据。
28、有益效果
29、本发明的有益效果在于:本发明在毫米波雷达单个设备的基础上,通过结合组合导航提供的位置、速度信息,根据探测目标中存在的“鬼影点”出现位置的未知性,提出了一种结合组合导航和毫米波雷达数据的鬼影点滤除方法:通过对目标出现的位置进行次数统计进而在不需要目标反射强度值(rcs)的前提下便可将鬼影点滤除。
30、由于毫米波雷达以及探测的目标都为动态,通过结合组合导航的位置信息将探测的目标的位置从雷达坐标系转换至全局坐标系,解决了由于毫米波雷达在移动过程中导致雷达坐标系非静态坐标系的问题,确保目标出现的位置是相对于全局原点的坐标而非相对于动态的雷达原点的坐标。由于动态目标的移动性,其在前后连续周期的短时间内,可近视为在小范围内移动,因此将雷达探测到的目标的矢量坐标转换至栅格坐标,增大了目标所处位置的范围;对于此处的范围:本方法为从一个点变成一个栅格(方形),对于栅格大小的选取,可以根据目标的移动速度以及毫米波雷达的移动速度进行适当调整。对于所设定的栅格表而言,栅格表中每个栅格都存储着该栅格位置上所出现过的所有目标的信息,通过对各目标出现时间的判定可及时删除该栅格上那些所存储但已不再需要的“旧周期”的目标信息,节约了进程运行的内存资源。对于删除的时机而言,本发明方法仅在目标出现时且该目标出现的栅格位置的目标数量达到阈值时,才进行“旧周期”判定进而删除判定为“旧周期”的目标信息,提高了代码运行效率。
- 还没有人留言评论。精彩留言会获得点赞!