一种干涉SAR运动舰船尾迹区域获取与尾迹速度场测量方法
本发明涉及海洋遥感监视,尤其是涉及一种干涉sar运动舰船尾迹区域获取与尾迹速度场测量方法。
背景技术:
1、雷达具有全天时、全天候工作和广域监视的优势,在海洋遥感监视领域具有重要应用。舰船作为人类海洋活动的主要信息输入,在开阔水域,运动舰船的尾部会伴随出现尾迹特征,舰船尾迹波持续时间长,空间分布范围大,与舰船体积、重量和运动参数密切相关。雷达测量舰船尾迹信号对间接实现低雷达散射截面积运动舰船目标的检测与参数估计具有重要的意义。
2、现有技术中,sar海洋图像上通常出现运动舰船目标的尾迹图像,但是尾迹图像与海洋背景的强度对比度有限,容易受到尾迹周围风驱动水波的影响,导致舰船尾迹测量并不稳健。g.zilman、a.zapolski与m.marom在“ieee transactions on geoscience andremote sensing”期刊的第42卷第10期“the speed andbeam ofa ship from its wake'ssar images”文章中公开了一种利用尾迹sar图像获取舰船速度与宽度的方法。该方法基于尾迹在sar图像上的线性特征,利用快速离散radon变换提取sar图像域运动舰船的开尔文尾迹和湍流尾迹,然后,分别对开尔文尾迹与湍流尾迹进行模型分析,反演出对应运动舰船的航速和船宽信息。但是,随海况升高,海面水波运动更加剧烈,尾迹波不断衰减,在sar图像上的强度减弱。并且,sar图像分辨率升高与雷达观测视角发生变化均会使得尾迹不再呈现线性特征,而是显现出接近光学图像中的面目标特点,导致利用线性特征的尾迹检测方法失效,进一步的,导致舰船参数反演的结果与实际情况相差很大。
技术实现思路
1、本发明的目的是提供一种干涉sar运动舰船尾迹区域获取与尾迹速度场测量方法,克服上述现有技术的不足,联合尾迹的多维度信息,改善复杂海况下运动舰船尾迹获取概率。
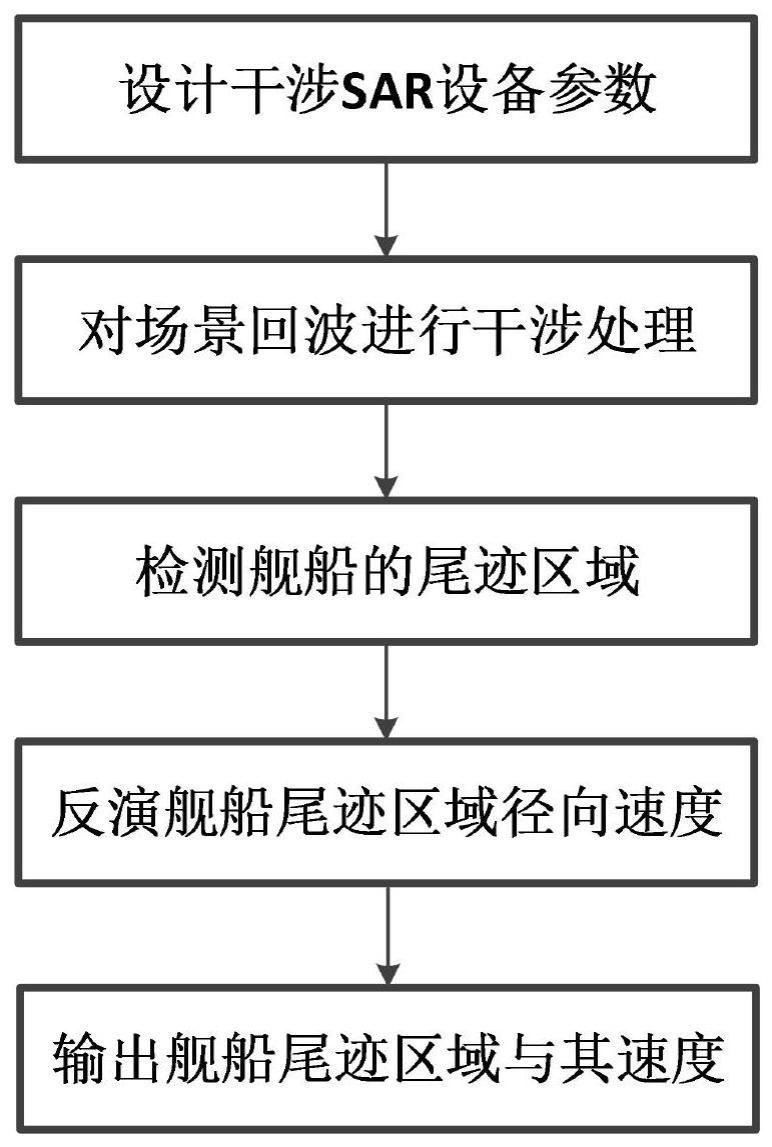
2、为实现上述目的,本发明提供了一种干涉sar运动舰船尾迹区域获取与尾迹速度场测量方法,步骤如下:
3、s1、根据舰船尾迹特征与电磁波传播机理,计算沿航迹干涉sar设备的关键参数;
4、s2、对观测场景回波数据进行归一化sar干涉处理;
5、s3、基于步骤s2获得的归一化干涉结果检测舰船尾迹像素点;
6、s4、基于空间欧式距离、归一化干涉结果的信息对舰船尾迹像素点进行聚类;
7、s5、检测出舰船尾迹;
8、s6、利用干涉相位信息反演舰船尾迹的径向速度场;
9、s7、利用舰船开尔文尾迹反演运动舰船参数;
10、s8、将舰船尾迹区域、舰船尾迹径向速度场和舰船尾迹对应的舰船航速和航向信息分别输出。
11、优选的,所述步骤s1中的干涉sar设备采用的模式为全孔径发射子孔径独立接收模式,所述全孔径发射子孔径独立接收模式对每个子阵接收的回波数据,采用r-d成像方法进行sar成像;
12、所述关键参数包括雷达平均发射功率与天线收发孔径的积x、发射天线面积s、天线沿航向长度da、天线垂直航向长度de、天线单元、相邻接收子阵间距d、信号带宽b,其采用的计算方式如下:
13、1)雷达平均发射功率与天线收发孔径的积:
14、
15、其中,x表示雷达平均发射功率与天线收发孔径的积,为x=pavgtgr,pav表示沿航迹干涉sar设备的平均发射功率,gt表示沿航迹干涉sar设备的发射天线增益,gr表示沿航迹干涉sar设备的接收天线增益,β0表示尾迹与噪声功率比,k为波尔兹曼常数,t0为沿航迹干涉sar设备的系统噪声温度,cb表示噪声带宽修正因子,f为沿航迹干涉sar设备的接收机噪声系数,l表示沿航迹干涉sar设备的系统损耗,r表示沿航迹干涉sar设备与待测量的舰船尾迹的斜距,ta表示沿航迹干涉sar设备的相参积累时间,λ表示沿航迹干涉sar设备发射的电磁波波长,σ表示舰船尾迹的雷达散射截面积;
16、2)发射天线面积:
17、
18、其中,n表示天线划分的子阵个数,a1表示天线效率,a2表示脉冲占空比,p0表示单个天线的辐射功率;
19、3)天线沿航向长度:
20、
21、其中,w表示观测场景幅宽,大于舰船尾迹区域的最大宽度;
22、4)天线垂直航向长度:
23、de≤da
24、5)天线单元为半波长排布的矩形平面阵,且满足下述约束:
25、
26、其中,b表示天线单元总数,ba表示沿航迹方向的天线单元数,bb表示垂直航迹方向的天线单元数,<·>表示取整操作;
27、6)相邻接收子阵间距:
28、
29、其中,va表示平台沿航迹运动速度,lk表示舰船开尔文尾迹波的波长,为g表示重力加速度值,为9.8m/s2,us表示舰船航速;
30、7)信号带宽满足下述约束条件:
31、
32、其中,c表示光速。
33、优选的,所述步骤s2中的归一化sar干涉处理为记一组相邻子阵的sar复图像数据,分别为z1(n)和z2(n),其计算方式如下:
34、
35、其中,n表示sar图像上像素点的索引,z(n)表示第n个像素点的归一化干涉结果,k表示多视数,取sar图像上与第n个像素点距离最接近的k个像素点,*表示共轭操作,e[·]表示求数学期望操作;
36、所述归一化sar干涉处理的结果为观测场景的干涉幅度与干涉相位,用ξ(n)和分别表示n个像素点的归一化干涉幅度和干涉相位,具体为:
37、
38、
39、优选的,所述归一化干涉结果为基于像素点的干涉幅度和干涉相位信息,所述步骤s3中检测的具体步骤如下:
40、s31、按照下式构造舰船尾迹像素点检测量:
41、
42、其中,t(n)表示第n个像素点的检测量,ξ(n)和分别表示第n个像素点的归一化干涉幅度和干涉相位,ξs和分别表示海杂波背景的干涉幅度均值和标准差,和分别表示海杂波背景的干涉相位均值和标准差;
43、s32、将t(n)≥η的像素点作为舰船尾迹像素点,η表示为尾迹像素点检测阈值。
44、优选的,所述步骤s4中聚类的具体步骤如下:
45、s41、记舰船尾迹像素点群为集合gt,像素点m与n的空间欧式距离记为pm,n,干涉幅度差异记为am,n=|ξ(m)-ξ(n)|,干涉相位差异记为构造像素点m与n的特征矢量[pm,n,am,n,bm,n];
46、s42、在集合gt中,遍历判断第m个像素点与第n个像素点的特征矢量是否满足下式:
47、
48、其中,m1,m2,m3分别表示3个调节系数,且m1>0,m2>0,m3>0,δa表示干涉幅度差异阈值,δa≥0,δp表示聚类空间距离阈值,为δb表示干涉相位差异阈值,为v0表示尾迹像素点的径向速度变化尺度;
49、若满足,则将第m个像素点与第n个像素点聚为一类,若不满足,则不聚为一类,任意两类具有共同像素点的类合并为同一类;
50、s43、对集合gt中像素点进行步骤s42的聚类后得到h个像素类。
51、优选的,所述步骤s5中舰船尾迹的检测步骤如下:
52、s51、对h个像素类进行面积检验,计算每一个像素类的最小外接图形面积,并与面积阈值比较,将大于面积阈值的像素类保留,小于面积阈值的像素类去除,h个像素类进行面积检验后记为h1个像素类;
53、s52、分别提取h1个像素类的最小外接图形,对h1个像素类进行图形检验,其中最小外接图形接近锐角三角形的像素类保留,不接近的像素类去除,获得m个像素类作为m个舰船尾迹。
54、优选的,所述步骤s6中反演舰船尾迹的径向速度场,计算方式如下:
55、
56、其中,vw(n)表示尾迹区域像素点n的径向速度。
57、优选的,所述步骤s7中反演的具体步骤如下:
58、s71、对于每一个舰船尾迹,分别提取其图形中锐角边作为各自的开尔文尾迹,利用fft操作获得开尔文尾迹波谱分布,其最大谱峰对应开尔文尾迹波的波数kd,估算该舰船尾迹对应舰船的航速计算方式如下:
59、
60、s72、将每一个舰船尾迹的两条开尔文尾迹夹角的角平分线方向记作其对应的舰船航线,其中,该尾迹中两条开尔文尾迹夹角指向其对应的舰船航行方向。
61、因此,本发明采用上述一种干涉sar运动舰船尾迹区域获取与尾迹速度场测量方法,适用于微波测量运动舰船尾迹、运动舰船尾迹区速度场与反演对应舰船目标的参数。其技术效果如下:
62、1)本发明通过结合运动舰船尾迹波的分布特点与电磁波散射机理,设计干涉sar设备参数,可以获得准确的运动舰船尾迹干涉测量信息和速度场信息。
63、2)本发明联合运动舰船尾迹的干涉幅度与干涉相位信息,构造运动舰船尾迹增强检测量,提高运动舰船尾迹与海杂波背景的对比度,改善复杂海况下运动舰船尾迹获取概率以及像素点的检测性能。
64、3)本发明通过对运动舰船尾迹进行图像分析,可以反演出对应舰船的尾迹区域的径向速度场等运动参数。
65、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!