一种基于融合套索的汽车毫米波雷达干扰信号消除系统及方法、目标检测系统及方法
本发明涉及雷达的干扰信号消除,具体涉及一种基于融合套索的汽车毫米波雷达干扰信号消除系统及方法、目标检测系统及方法。
背景技术:
1、随着无人驾驶技术的发展,自动驾驶汽车具备了高级辅助驾驶系统(advanceddriver-assistancesystems,adas),实现了变道辅助、盲点检测、自适应巡航控制和碰撞预警的辅助功能,对于降低驾驶员失误,提升交通安全有重要意义。
2、毫米波雷达具有全天候特性,对于无人驾驶具有重要的意义。汽车毫米波雷达使用相同频谱将会产生互干扰,根据国际电信联盟的标准,交通道路上的汽车毫米波雷达将共用同一频谱,一般的自动驾驶汽车将会在车辆的四周配置多部毫米波雷达。因此,随着自动驾驶的普及,交通道路上的汽车毫米波雷达数量不断增多,毫米波雷达之间的互干扰现象将会变得更加严重,产生互干扰的概率将会变高,互干扰的平均功率将会提升,导致汽车毫米波雷达的检测精度降低。严重时,干扰将会在汽车毫米波雷达的频谱中产生虚假目标,最终导致汽车毫米波雷达误判。
3、现有基于形态分量分析的方法在频域、小波变换域中进行干扰信号的抑制,需要额外的迭代,因此计算量较大。且在频域和小波变换域进行干扰信号的抑制,其性能受傅里叶变换和小波变换分辨率的限制,因此性能较差。此外,基于形态分量分析在频域和小波变换域对干扰进行抑制的方法,需要对信号进行分解和重构,此时涉及到干扰信号与目标信号的能量分配问题,目前尚无有效的形态分量分析能量分配算法,所以易出现目标信号能量损失和干扰信号残余。此外该类型的方法参数较多,在不同信号间干扰信号抑制性能有较大差别,固定的参数设定无法满足所有信号的干扰信号消除,因此该类型方法性能较差。
4、现有在时域中基于干扰信号特征对干扰进行提取的算法,是直接将干扰信号连同目标信号进行直接切除,随后通过稀疏或者预测方法对切除的部分进行恢复。然而,被切除的目标信号中包含了重要的目标检测信息,被恢复的部分也仅仅是假信息而已,所以该方法的正确性尚存有疑惑。
5、现有基于传统滤波器的方法,依赖于干扰信号的先验知识,目前获取先验知识的方法性能较差,所以导致干扰信号残留。
技术实现思路
1、针对现有技术存在的问题,本发明的目的在于提供一种基于融合套索的汽车毫米波雷达干扰信号消除系统及方法、目标检测系统及方法,其能有效地抑制汽车毫米波雷达干扰和假目标,并有效恢复目标信号。
2、为实现上述目的,本发明采用的技术方案是:
3、一种基于融合套索的汽车毫米波雷达脉冲式干扰信号消除系统,所述系统包括回波信号建模单元、干扰信号提取与消除单元、目标信号增强单元;
4、所述回波信号建模单元对雷达的回波信号y进行建模:
5、y=(st+si)+n
6、其中,st是目标信号,si表示干扰信号,n表示雷达接收机中的噪声,
7、所述干扰信号提取与消除单元,从雷达信号时域中将脉冲式的干扰提取与消除,得到目标信号;
8、首先,基于融合套索稀疏表示脉冲信号,建立稀疏优化模型从回波信号y中提取出干扰信号:
9、
10、其中,和||·||1分别表示l2范数和l1范数,λ0,λ1>0是正则化参数,正则化参数影响着模型的收敛速率,两个范数||si||1和||d0si||1的联合表示融合套索,||d0si||1表示总变分范数,矩阵表示一阶差分算子;
11、然后,通过非凸范数解决上述干扰信号的低估问题:将非凸范数定义为φ(x;a),其中a>0,参数a决定了罚函数的非凸特性,将干扰信号的提取和消除模型表示为:
12、
13、目标信号增强单元,用于对目标信号st进行增强处理,以消除白噪声和零多普勒。
14、所述目标信号增强单元的处理具体如下:
15、基于广义全变分建立目标信号增强模型为:
16、
17、其中,yp是经过干扰提取与消除后的回波信号,λ2>0是正则化参数,矩阵是二阶差分算子,服从v=sr,v是yp二阶导数,算子s将v转换为重叠信号的和,且矩阵r是信号v的稀疏表示,bn(r)=[r2n,r2n+1]t且参数ρ1和ρ2分别为δslope和δvalue的权重,该δslope和δvalue决定得到的目标信号的特征,其中δslope=vn+vn+1、δvalue=(vn-vn+1)/2,较高的ρ1/ρ2诱导出目标信号较高的离散特性。
18、一种基于融合套索的汽车毫米波雷达目标检测系统,其包括如上所述的汽车毫米波雷达脉冲式干扰信号消除系统、以及目标检测单元,
19、所述目标检测单元用于对干扰信号消除系统处理后的信号进行快时间维目标距离检测和慢时间维相干积累目标速度检测,获取目标距离和速度信息。
20、一种基于融合套索的汽车毫米波雷达脉冲式干扰信号消除方法,所述方法采用如上所述的系统实现,其包括以下步骤:
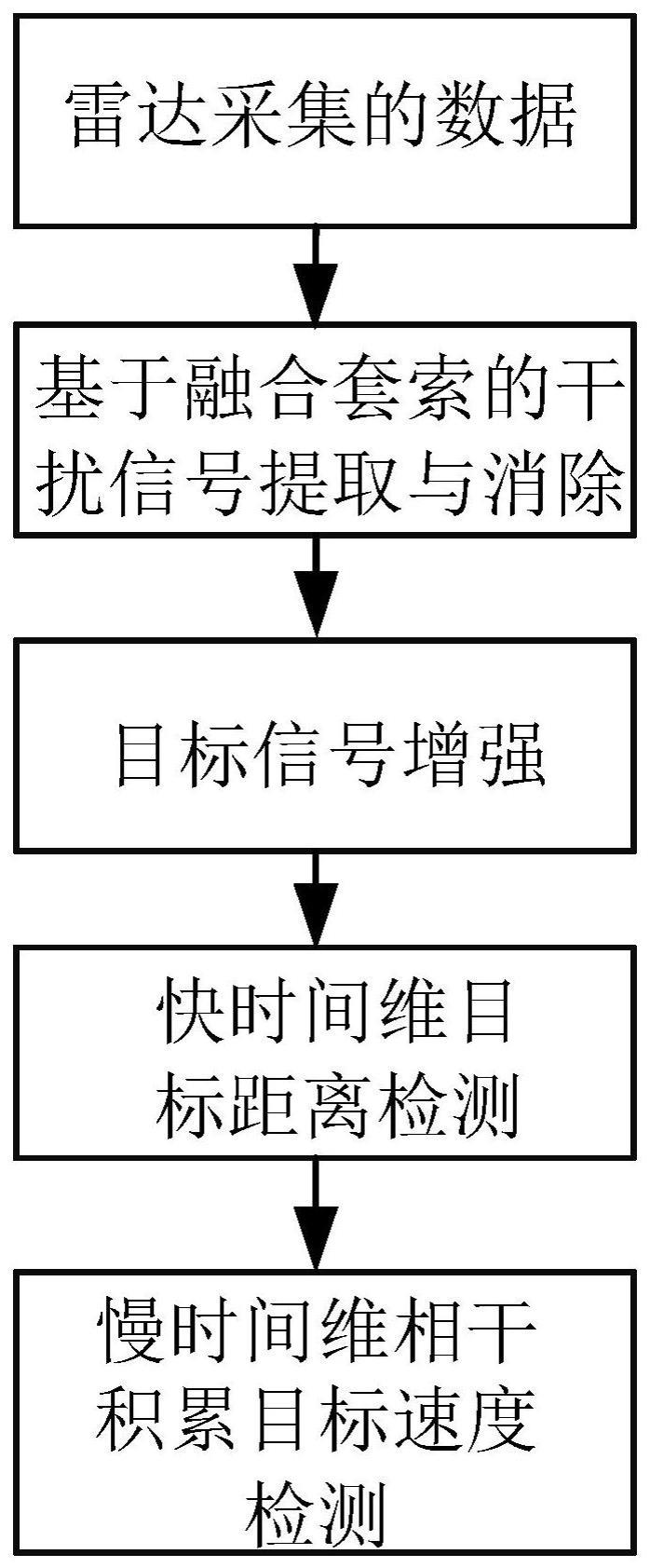
21、步骤1、雷达采集的数据输入到干扰抑制系统中;
22、步骤2、干扰抑制系统通过干扰信号提取与消除单元从雷达信号时域中将脉冲式的干扰提取与消除,得到目标信号;
23、首先,将雷达的回波信号y建模为:
24、y=(st+si)+n
25、其中,st是目标信号,si表示干扰信号,n表示雷达接收机中的噪声,
26、然后,基于融合套索稀疏表示脉冲信号,建立下面的稀疏优化模型从回波信号中提取干扰信号:
27、
28、其中,和||·||1分别表示l2范数和l1范数,λ0,λ1>0是正则化参数,正则化参数影响着模型的收敛速率,两个范数||si||1和||d0si||1的联合表示融合套索,||d0si||1表示总变分范数,矩阵表示一阶差分算子;
29、通过非凸范数解决上述雷达信号的低估问题:将非凸范数定义为φ(x;a),其中a>0,参数a决定了罚函数的非凸特性,将干扰信号的提取和消除模型表示为:
30、
31、步骤3、通过目标信号增强单元对目标信号进行增强处理,同时消除白噪声和零多普勒干扰。
32、所述步骤3具体如下:
33、基于广义全变分建立目标信号增强模型为:
34、
35、其中,yp是经过干扰提取与消除后的回波信号,λ2>0是正则化参数,矩阵是二阶差分算子,服从v=sr,v是yp二阶导数,算子s将v转换为重叠信号的和,且矩阵r是信号v的稀疏表示,bn(r)=[r2n,r2n+1]t且参数ρ1和ρ2分别为δslope和δvalue的权重,该δslope和δvalue决定得到的目标信号的特征,其中δslope=vn+vn+1、δvalue=vn-vn+1/2,较高的ρ1/ρ2诱导出目标信号较高的离散特性。
36、一种基于融合套索的汽车毫米波雷达目标检测方法,其包括如上所述的汽车毫米波雷达脉冲式干扰信号消除方法;所述目标检测方法还包括
37、对增强处理后的信号进行快时间维目标距离检测和慢时间维相干积累目标速度检测,获取目标距离和速度信息。
38、采用上述方案后,本发明在时域中对雷达进行干扰抑制,解决了频域和小波变换分析方法带来的额外计算量较大的问题,因此本技术在时域对干扰进行抑制,节省了较大计算量,提高了汽车毫米波雷达干扰信号抑制的实时性。本技术非传统基于形态分量分析的方法,因此无需考虑目标信号与干扰信号的能量分配问题。在时域中对雷达进行干扰抑制,也避免了频域和小波变换域分析方法,因傅里叶变换和小波变换分辨率带来的干扰抑制性能损耗,因此具有较好的性能。而且,本发明在时域中对雷达进行干扰抑制,并没有直接将包含干扰信号的部分进行切除,而是通过稀疏优化的方法将干扰信号提取出来,所以不会造成目标信号的损失。
39、此外,本发明通过目标信号增强单元对目标信号进行增强,同时可去除零多普勒干扰和白噪声,能够有效恢复目标信号。
- 还没有人留言评论。精彩留言会获得点赞!