基于区块链的无人驾驶运输车行驶路线规划方法及装置
1.本发明涉及无人驾驶车辆技术领域,具体而言,涉及一种基于区块链的无人驾驶运输车行驶路线规划方法及装置。
背景技术:
2.以露天矿厂生产运输系统、超大仓储运输系统为代表的集中路段多车辆密集行驶模式是一个动态复杂的运输系统,其特点是大部分车辆的行驶路线、行驶环境、规划行程轨迹等数据存在交集。在多车辆行驶路线规划过程中,现有的规划方法为采用图论和线性规划等方式,根据矿区的道路条件、车辆性能、负载量、安全距离等因素建立对应的数学模型并综合考虑各种限制条件,通过使用矩阵运算、求导等数学工具进行计算得到最优解,但是这样的规划方法过于复杂,使得路线规划问题难以求解,并且难以根据实际中的道路拥堵、交通事故等情况实时对无人驾驶运输车行驶路线进行调整。
3.基于上述问题,现需要一种基于区块链的区块链的无人驾驶运输车行驶路线规划方法,能够将道路信息、道路实时图像、运输车性能信息和环境实时信息等数据进行存储和共享,并根据历史环境信息构建环境预测模型,将实时环境信息作为输入,得到环境预测信息,以适应不断变化的环境条件。
技术实现要素:
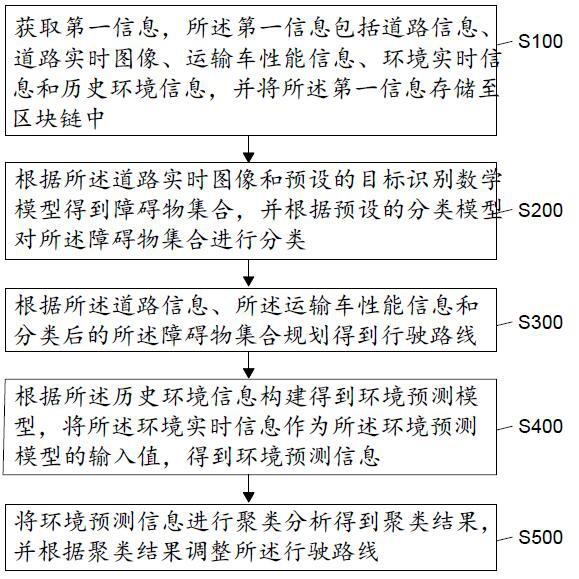
4.本发明的目的在于提供一种基于区块链的无人驾驶运输车行驶路线规划方法及装置,以改善上述问题。为了实现上述目的,本发明采取的技术方案如下:一方面,本技术提供了一种基于区块链的无人驾驶运输车行驶路线规划方法,包括:获取第一信息,所述第一信息包括道路信息、道路实时图像、运输车性能信息、环境实时信息和历史环境信息,并将所述第一信息存储至区块链中;根据所述道路实时图像和预设的目标识别数学模型得到障碍物集合,并根据预设的分类模型对所述障碍物集合进行分类;根据所述道路信息、所述运输车性能信息和分类后的所述障碍物集合规划得到行驶路线;根据所述历史环境信息构建得到环境预测模型,将所述环境实时信息作为所述环境预测模型的输入值,得到环境预测信息;将环境预测信息进行聚类分析得到聚类结果,并根据聚类结果调整所述行驶路线。
5.另一方面,本技术还提供了一种基于区块链的无人驾驶运输车行驶路线规划装置,包括:获取模块,用于获取第一信息,所述第一信息包括道路信息、道路实时图像、运输车性能信息、环境实时信息和历史环境信息,并将所述第一信息存储至区块链中;
构建模块,用于根据所述道路实时图像和预设的目标识别数学模型得到障碍物集合,并根据预设的分类模型对所述障碍物集合进行分类;分类模块,用于根据所述道路信息、所述运输车性能信息和分类后的所述障碍物集合规划得到行驶路线;分析模块,用于根据所述历史环境信息构建得到环境预测模型,将所述环境实时信息作为所述环境预测模型的输入值,得到环境预测信息;调整模块,用于将环境预测信息进行聚类分析得到聚类结果,并根据聚类结果调整所述行驶路线。
6.本发明的有益效果为:本发明通过将道路信息、道路实时图像、运输车性能信息和环境实时信息存储至区块链中,可以保证数据安全性并提高数据共享性,有助于提高行驶路线的准确性和可靠性;而且,根据历史环境信息构建环境预测模型,并将实时环境信息作为输入值,得到环境预测信息。这有助于预测并调整行驶路线,以适应不断变化的环境条件。
7.本发明的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
附图说明
8.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
9.图1为本发明实施例中所述的基于区块链的无人驾驶运输车行驶路线规划方法流程示意图;图2为本发明实施例中所述的基于区块链的无人驾驶运输车行驶路线规划装置结构示意图。
10.图中标记:1、获取模块;2、构建模块;21、第一处理单元;22、第一分析单元;23、第一分类单元;24、第二处理单元;3、分类模块;31、第一计算单元;32、第三处理单元;33、第四处理单元;34、第五处理单元;4、分析模块;41、第六处理单元;42、第七处理单元;43、第八处理单元;44、第九处理单元;5、调整模块;51、第十处理单元;52、第二分类单元;53、第十一处理单元;54、第十二处理单元。
具体实施方式
11.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的
所有其他实施例,都属于本发明保护的范围。
12.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。同时,在本发明的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
13.实施例1:本实施例提供了一种基于区块链的无人驾驶运输车行驶路线规划方法。
14.参见图1,图中示出了本方法包括步骤s100、步骤s200、步骤s300、步骤s400和步骤s500。
15.步骤s100、获取第一信息,第一信息包括道路信息、道路实时图像、运输车性能信息、环境实时信息和历史环境信息,并将第一信息存储至区块链中。
16.可以理解的是,在本步骤中通过摄像头获取道路实时图像,通过道路信息系统获取道路信息,通过无人驾驶运输车系统获取运输车性能信息,通过气象信息系统获取环境实时信息和历史环境信息,在获取完所有信息后,将这些信息存储至区块链中,以便后续处理和共享,保证数据安全性并提高数据共享性,有助于提高行驶路线规划的准确性和可靠性。
17.步骤s200、根据道路实时图像和预设的目标识别数学模型得到障碍物集合,并根据预设的分类模型对障碍物集合进行分类。
18.可以理解的是,在本步骤中,使用图像分割技术将障碍物从道路图像中分离出来,并将分离出来的障碍物作为障碍物集合,然后将障碍物按照类型分为不同的类别,例如,可以将障碍物分为行人、车辆、障碍物等不同的类别,以便后续处理。需要说明的是,步骤s200包括步骤s210、步骤s220、步骤s230和步骤s240。
19.步骤s210、将道路实时图像进行预处理得到预处理图像数据。
20.可以理解的是,在本步骤中,对道路实时图像进行裁剪、去噪、调整亮度等操作,以便更好地提取有用的信息。
21.步骤s220、基于神经网络模型对预处理图像数据进行分析,识别出道路上的存在物体得到障碍物集合。
22.可以理解的是,在本步骤中,神经网络模型是一种用于处理图像数据的模型,能够通过学习大量的样本数据来模拟人脑的神经网络,从而实现对图像的分析和识别。
23.步骤s230、根据障碍物集合和预设的分类模型对障碍物集合进行分类。
24.可以理解的是,在本步骤中分类模型是一种用于将数据分成不同类别的模型,能够更好地理解数据的结构和关系,常见的分类模型包括基于神经网络的分类器、基于决策树的分类器等。通过对障碍物集合进行分类,可以将障碍物分成不同的类别,例如人、车、树木等。
25.步骤s240、将分类后的障碍物集合存储至区块链上。
26.可以理解的是,在本步骤中,通过区块链技术,我们可以在不同的节点之间进行数据存储和共享,从而达到保护数据完整性的目的。首先,我们需要将障碍物集合中的障碍物信息进行打包,并生成一个新的区块,然后将新的区块添加到区块链上,即可实现在任何时候通过查询区块链来获取障碍物集合的信息。
27.步骤s300、根据道路信息、运输车性能信息和分类后的障碍物集合规划得到行驶
路线。
28.需要说明的是,步骤s300包括步骤s310、步骤s320、步骤s330和步骤s340。
29.步骤s310、根据道路信息和分类后的障碍物集合,计算出至少一条可通行路线得到第一路线集合。
30.可以理解的是,在本步骤中,规划无人驾驶运输车的行驶路线时,根据道路信息和障碍物集合计算出至少一条可通行的路线。这条路线可能是避开障碍物的最短路径,也可能是避开障碍物的最安全路径,具体依据实际情况而定。
31.步骤s320、将运输车性能信息中的性能指标作为限制,从路线集合中筛选得到第二路线集合,性能指标包括转弯半径、续航能力和车辆尺寸。
32.可以理解的是,在本步骤中,通过根据运输车的性能信息,从第一路线集合中筛选出第二路线集合,可以确保运输车在行驶过程中能够满足性能要求,并且能够顺利到达目的地。
33.步骤s330、基于遗传算法对第二路线集合进行优化,得到行驶路线。
34.可以理解的是,在本步骤中,基于遗传算法对这些路线进行优化,以得到更优秀的行驶路线。遗传算法是一种基于自然进化原理的优化算法,它能够通过模拟生物种群的遗传特征,在给定的限制条件下寻找最优解。
35.步骤s340、将行驶路线存储到区块链上,对无人驾驶运输车进行导航。
36.可以理解的是,在本步骤中,将行驶路线存储到区块链上可以通过将路线数据作为交易信息存储在区块链上来实现。每个交易包含有关路线的信息,如起点、终点、拐点和避让区域等。这些交易信息将成为新块的一部分,并被加入区块链中,在无人驾驶运输车的导航系统中,使用区块链中存储的行驶路线信息进行导航。通过将行驶路线信息存储到区块链上,可以保证这些信息的可靠性和安全性。
37.步骤s400、根据历史环境信息构建得到环境预测模型,将环境实时信息作为环境预测模型的输入值,得到环境预测信息。需要说明的是,步骤s400包括步骤s410、步骤s420、步骤s430和步骤s440。
38.步骤s410、将历史环境信息进行清洗和预处理得到样本数据,历史环境信息包括天气、路面情况、障碍物位置。
39.可以理解的是,在本步骤中对历史环境信息进行检查,查看数据是否完整、准确,并删除不需要的信息,然后对数据进行一些预处理,比如转换数据格式,提取出有用的特征。
40.步骤s420、将样本数据作为输入,训练神经网络模型。
41.可以理解的是,在本步骤中将处理后得到的样本数据分为训练集和测试集,用于模型训练和验证。
42.步骤s430、通过调整模型参数,优化神经网络模型的准确度得到环境预测模型。
43.可以理解的是,在本步骤中,选择一个多层感知器作为神经网络模型,并使用交叉熵损失函数,设置学习率为 0.001,隐藏层大小为 64,批量大小为 32,使用随机梯度下降算法进行模型训练,迭代 100 次,每次迭代中,使用训练集中的一批数据,计算模型的输出与实际标签之间的差距,并根据损失函数计算出梯度,来更新模型的参数。最后使用测试集来评估模型的性能,比如计算准确率、召回率和精确率等。
44.步骤s440、根据环境实时信息和环境预测模型得到环境预测信息,环境预测信息包括未来预设时间段内可能出现的天气、障碍物和交通拥堵。
45.可以理解的是,在本步骤中,通过环境预测模型,根据当前的实时信息和预设的时间段,预测未来可能出现的天气、障碍物和交通拥堵等情况。
46.步骤s500、将环境预测信息进行聚类分析得到聚类结果,并根据聚类结果调整行驶路线。
47.可以理解的是,在本步骤中,将对环境预测信息进行聚类分析,以找出相似的情况并将它们分组,然后根据这些信息来调整行驶路线,以避开可能出现问题的区域或避免出现重复的情况。需要说明的是,步骤s500包括步骤s510、步骤s520、步骤s530和步骤s540。
48.步骤s510、基于距离的聚类算法对环境预测信息进行处理,得到聚类结果。
49.可以理解的是,在本步骤中,使用基于距离的聚类算法对环境预测信息进行处理,以找出相似的情况并将它们分组。
50.步骤s520、对聚类结果按照相似的环境变化情况进行分类,得到环境预测信息分类结果。
51.可以理解的是,在本步骤中,对聚类结果进一步进行分析,以找出不同类别的环境变化情况,并将它们进行分类。优选地,根据环境预测信息中出现的障碍物类型、交通流量等信息来进行分类。
52.步骤s530、根据环境预测信息分类结果调整无人驾驶运输车的行驶路线。
53.可以理解的是,在本步骤中根据分类结果,可以找出无人驾驶运输车可能遇到的不同情况,并根据这些情况调整行驶路线,以避开可能出现问题的区域或避免出现重复的情况。
54.步骤s540、对区块链中的行驶路线按照预设的周期进行更新。
55.可以理解的是,在本步骤中需要定期检查无人驾驶运输车的行驶路线,并根据最新的环境预测信息进行更新。实现对无人驾驶运输车的行驶路线进行实时调整,以应对未来可能出现的环境变化。这有助于提高无人驾驶运输车的安全性和可靠性,并且可以避免潜在的交通事故。
56.实施例2:如图2所示,本实施例提供了一种基于区块链的无人驾驶运输车行驶路线规划装置,装置包括:获取模块1,用于获取第一信息,第一信息包括道路信息、道路实时图像、运输车性能信息、环境实时信息和历史环境信息,并将第一信息存储至区块链中。
57.构建模块2,用于根据道路实时图像和预设的目标识别数学模型得到障碍物集合,并根据预设的分类模型对障碍物集合进行分类。
58.分类模块3,用于根据道路信息、运输车性能信息和分类后的障碍物集合规划得到行驶路线。
59.分析模块4,用于根据历史环境信息构建得到环境预测模型,将环境实时信息作为环境预测模型的输入值,得到环境预测信息。
60.调整模块5,用于将环境预测信息进行聚类分析得到聚类结果,并根据聚类结果调整行驶路线。
61.在本公开的一种具体实施方式中,构建模块2包括:第一处理单元21,用于将道路实时图像进行预处理得到预处理图像数据。
62.第一分析单元22,基于神经网络模型对预处理图像数据进行分析,识别出道路上的存在物体得到障碍物集合。
63.第一分类单元23,用于根据障碍物集合和预设的分类模型对障碍物集合进行分类。
64.第二处理单元24,将分类后的障碍物集合存储至区块链上。
65.在本公开的一种具体实施方式中,分类模块3包括:第一计算单元31,用于根据道路信息和分类后的障碍物集合,计算出至少一条可通行路线得到第一路线集合。
66.第三处理单元32,用于将运输车性能信息中的性能指标作为限制,从路线集合中筛选得到第二路线集合,性能指标包括转弯半径、续航能力和车辆尺寸。
67.第四处理单元33,基于遗传算法对第二路线集合进行优化,得到行驶路线。
68.第五处理单元34,用于将行驶路线存储到区块链上,对无人驾驶运输车进行导航。
69.在本公开的一种具体实施方式中,分析模块4包括:第六处理单元41,用于将历史环境信息进行清洗和预处理得到样本数据,历史环境信息包括天气、路面情况、障碍物位置。
70.第七处理单元42,用于将样本数据作为输入,训练神经网络模型。
71.第八处理单元43,用于通过调整模型参数,优化神经网络模型的准确度得到环境预测模型。
72.第九处理单元44,用于根据环境实时信息和环境预测模型得到环境预测信息,环境预测信息包括未来预设时间段内可能出现的天气、障碍物和交通拥堵。
73.在本公开的一种具体实施方式中,调整模块5包括:第十处理单元51,基于距离的聚类算法对环境预测信息进行处理,得到聚类结果。
74.第二分类单元52,用于对聚类结果按照相似的环境变化情况进行分类,得到环境预测信息分类结果。
75.第十一处理单元53,用于根据环境预测信息分类结果调整无人驾驶运输车的行驶路线。
76.第十二处理单元54,用于对区块链中的行驶路线按照预设的周期进行更新。
77.需要说明的是,关于上述实施例中的装置,其中各个模块执行操作的具体方式已经在有关该方法的实施例中进行了详细描述,此处将不做详细阐述说明。
78.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1