一种解决光纤陀螺大角冲击的方法与流程
1.本发明涉及光纤陀螺技术领域,尤其涉及一种解决光纤陀螺大角冲击的方法。
背景技术:
2.光纤陀螺是一种基于sagnac效应的角速率传感器,具有全固态结构、抗冲击振动、动态范围大、频带宽、易于数字化实现等优点。高精度光纤陀螺在较大速率下上电启动或者受到较大冲击的情况下,若光纤陀螺调制发生了跨条纹现象,光纤陀螺瞬时会感受到一个较大的加速度,从而引起光纤陀螺输出失真。因此,提高光纤陀螺的抗冲击性能可以有效扩大光纤陀螺的应用范围,拓展高精度光纤陀螺的应用。
技术实现要素:
3.本发明所要解决的技术问题是提供一种解决光纤陀螺大角冲击的方法,通过计算光纤陀螺单条纹最大测量范围对应的光纤陀螺转速,并计算出此时的ad解调值,然后将此时的ad解调值与作差,通过差值判断光纤陀螺是否受到大冲击,然后采用ad解调值或作为相移,补偿由于冲击产生的相移,保证光纤陀螺在大冲击的情况下稳定闭环,从而保证光纤陀螺惯导的精度。
4.本发明是通过以下技术方案予以实现:
5.一种解决光纤陀螺大角冲击的方法,其包括如下步骤:s1:根据式(1)计算光纤陀螺单条纹最大测量范围对应的光纤陀螺转速;(1)其中:是线圈长度,是线圈直径,是光波长,是真空中的光速;s2:根据式(2)计算出光纤陀螺转速为时到达探测器的电压信号;;(2)其中:为到达探测器的光强;为sanac增益系数,;为探测器转换系数,;为探测器的转换效率,为探测器的跨阻抗,为调制相位;s3:根据式(3)计算光纤陀螺转速为时的ad解调值;(3)
其中:n为模数转换器的位数;为ad转换器的基准电压;s4:计算光纤陀螺的ad解调值与的差值,若差值≤0,则用ad解调值作为光纤陀螺的反馈相移,传输给da转换器,经da转换器处理后反馈给y波导,补偿由于冲击产生的相移,形成光纤陀螺相位闭环;若差值>0,则用作为光纤陀螺的反馈相移,传输给da转换器,经da转换器处理后反馈给y波导,补偿由于冲击产生的相移,形成光纤陀螺相位闭环。
6.进一步,光纤陀螺的数据输出独立于相移闭环,使用光纤陀螺的ad解调值经解调积分处理后作为光纤陀螺的数据输出。
7.优化的,s4中每间隔0.4ms计算一次光纤陀螺的ad解调值与的差值。
8.发明的有益效果:1.能够补偿由于冲击产生的相移,保证光纤陀螺在大冲击的情况下稳定闭环,从而保证光纤陀螺惯导的精度。
9.2.光纤陀螺的数据输出独立于相移闭环,使用光纤陀螺的ad解调值经解调积分处理后作为光纤陀螺的数据输出,既保证了光纤陀螺闭环,又保证光纤陀螺精度不损失。
附图说明
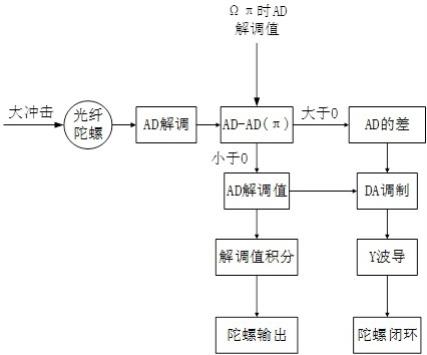
10.图1是本发明流程图。
11.图2是本发明系统图。
12.图3是本发明光纤陀螺受到的冲击曲线示意图。
13.图4是本发明光纤陀螺理论响应冲击曲线示意图。
14.图5是本发明光纤陀螺实际响应冲击曲线示意图。
具体实施方式
15.一种解决光纤陀螺大角冲击的方法,具体流程图如附图1所示,其包括如下步骤:s1:根据式(1)计算光纤陀螺单条纹最大测量范围对应的光纤陀螺转速;(1)其中:是线圈长度,是线圈直径,是光波长,是真空中的光速;s2:根据式(2)计算出光纤陀螺转速为时到达探测器的电压信号;;(2)其中:为到达探测器的光强;为sanac增益系数,;为探测器转换系数,;为探测器的转换效率,为探测器的跨阻抗,为调制相位;
s3:根据式(3)计算光纤陀螺转速为时的ad解调值;(3)其中:n为模数转换器的位数;为ad转换器的基准电压;s4:计算光纤陀螺的ad解调值与的差值,若差值≤0,则用ad解调值作为光纤陀螺的反馈相移,传输给da转换器,经da转换器处理后反馈给y波导,补偿由于冲击产生的相移,形成光纤陀螺相位闭环;若差值>0,则用作为光纤陀螺的反馈相移,传输给da转换器,经da转换器处理后反馈给y波导,补偿由于冲击产生的相移,形成光纤陀螺相位闭环。
16.光纤陀螺的系统图如附图2所示,ase光源产生的宽谱激光,通过保偏耦合器,经过y波导后,分成两束方向相反的相干光进入敏感光纤环,根据sagnac原理,敏感光纤环敏感到外界输入角速率,携带有该角速率信号的相干光返回y波导进行合束,光信号传入保偏耦合器,再传入探测器,由探测器将携带有外界输入角速率的光信号进行光电转换,转换为电信号;ad转换器将该电信号进行模数转换,转换成数字信号,进入数字处理单元进行信号处理,解算出角速率信号,该角速率信号一方面直接由数据输出模块输出,一方面由da转换器转换为数字信号,反馈给y波导,形成光纤陀螺数字闭环。
17.上述方法中对于某一型号的光纤陀螺,、及的值为固定值,可以在光纤陀螺运行前将的值计算出来存储至数字处理单元内,然后将实时监测ad解调值,并将ad解调值输送至数字处理单元做差值,若差值大于零,则数字处理单元将的值传输给da转换器,经da转换器处理后反馈给y波导,若差值≤0,则用ad解调值作为光纤陀螺的反馈相移,传输给da转换器,经da转换器处理后反馈给y波导。
18.光纤陀螺的输出即反馈相位差是通过测量干涉光信号的光强获得的,而干涉光信号的光强为的周期函数,但二者之间并非单值对应关系。当光纤陀螺受到一个较大冲击时,光纤陀螺瞬时感受到一个较大的加速度,光纤陀螺的干涉位置有可能就为(n=1,2,3
……
),而光强不变。其原因在于角速度的值在短时间内迅速上升,导致反馈相位差跟不上角速度的变化量,当两者的差值大于π时,根据光纤陀螺解调环节可知,当大于π后,由正变负,反馈相位差与角速度的差值越大,光纤陀螺输出数值反而变小,导致反馈相位差与角速度的差值越变越大。随着角速度的增大,反馈相位差不仅没有继续随之增大,反而向相反的方向减小。因此,当角速度由较大值逐渐下降回初始值时,反馈相位差并没有稳定在初始角速度对应的相位差位置,而是在距离初始相位相差2π相位的条纹处。光纤惯导设备此时就会收到光纤陀螺的错误输出,引起错误制导。
19.具体光纤陀螺受到的冲击曲线示意图如附图3所示,光纤陀螺敏感到的机械转动
过程为起始转速为,在t时间内以固定的较大加速度上升至,然后以时间逐渐下降至原转速的信号。
20.在冲击过程中由sagnac效应可知,光纤陀螺受到的冲击曲线即光纤陀螺输入转速信号ω如附图2所示,理论上对于起始相位为在t时间内以固定的较大加速度上升至,然后以时间逐渐下降至原相位的信号,具体光纤陀螺理论响应冲击的曲线示意图如附图4所示。但是实际光纤陀螺响应冲击时,由于起始转速的迅速增加,起始相位的值在短时间内迅速上升,导致闭环系统的反馈量跟不上输入转速的变化量,当输入转速由最大值逐渐下降回到起始转速值时,光纤陀螺输出相位值没有稳定在起始相位处,反而继续减小,最终稳定在与相差的条纹处,与起始值刚好差了,由此,光纤陀螺就会收到一个错误的输出信号,导致错误制导,为影响光纤陀螺惯导的精度,具体光纤陀螺实际响应冲击曲线示意图如附图5所示。
21.本专利的大角冲击指的就是光纤陀螺所受冲击引起的转速大于单条纹最大测量范围对应的光纤陀螺转速。
22.而通过上述步骤s1-s4的方法,先计算出光纤陀螺单条纹最大测量范围对应的光纤陀螺转速,并计算出此时的ad解调值,然后将此时的ad解调值与作差,若差值≤0,说明冲击引起的转速小于单条纹最大测量范围对应的光纤陀螺转速,不属于本专利所说的大角冲击,则用ad解调值作为光纤陀螺的反馈相移,传输给da转换器,经da转换器处理后反馈给y波导,补偿由于冲击产生的相移,形成光纤陀螺相位闭环,若差值>0,则说明冲击引起的转速大于单条纹最大测量范围对应的光纤陀螺转速,属于本专利所说的大角冲击,用的值作为光纤陀螺的反馈相移,传输给da转换器,经da转换器处理后反馈给y波导,补偿由于冲击产生的相移,形成光纤陀螺相位闭环。
23.这种通过差值判断光纤陀螺是否受到大冲击,然后采用ad解调值或作为相移,补偿由于冲击产生的相移,可以保证光纤陀螺在大冲击的情况下稳定闭环,从而保证光纤陀螺惯导的精度。
24.进一步,光纤陀螺的数据输出独立于相移闭环,使用光纤陀螺的ad解调值经解调积分处理后作为光纤陀螺的数据输出。当光纤陀螺受到大角冲击时,现有流行的光纤陀螺解决方案是:光纤陀螺反馈相位清零,重新开始闭环反馈,这时光纤陀螺的输出不能准确反映光纤陀螺受到的角速度,造成较大的误差,进而造成系统导航精度损失。而依据本专利的方法,光纤陀螺输出和光纤陀螺闭环反馈量分开处理,用ad解调值和adπ的差值进行光纤陀螺数字闭环,同时ad解调值作为正常的光纤陀螺输出,既保证了光纤陀螺闭环,又保证光纤陀螺精度不损失。
25.优化的,s4中每间隔0.4ms计算一次光纤陀螺的ad解调值与的差值,当光纤陀
螺受到大角冲击时,可以及时补偿由于冲击产生的相移,形成光纤陀螺相位闭环,从而保证光纤陀螺在大冲击的情况下稳定闭环,继而保证光纤陀螺惯导的精度。
26.综上所述,本发明提出的一种解决光纤陀螺大角冲击的方法,通过计算光纤陀螺单条纹最大测量范围对应的光纤陀螺转速,并计算出此时的ad解调值,然后将此时的ad解调值与作差,通过差值判断光纤陀螺是否受到大冲击,然后采用ad解调值或作为相移,补偿由于冲击产生的相移,能够保证光纤陀螺在大冲击的情况下稳定闭环,从而保证光纤陀螺惯导的精度。
27.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1