一种大口径光学系统的原位波前测量装置及方法
本发明涉及光学系统的波前测量装置及方法,具体涉及一种大口径光学系统的原位波前测量装置及方法。
背景技术:
1、未来的光学系统需要越来越大的孔径,以便收集更多的光线和以更高的分辨率进行精确观测。同时,更大口径的光学系统也对望远镜的检测技术提出更高要求。
2、传统的大口径光学系统检测手段是利用标准平面镜的自准直法。这种方法需要使用标准平面镜来做自准直光检测,自准直检测根据波前探测器件的不同又分为基于干涉仪的自准直检测和基于夏克-哈特曼波前传感器的自准直检测。
3、工程上常用于光学系统装调的自准直检测方法为干涉自准直检测。将干涉仪放置在待测光学系统的成像焦点附近,调整干涉仪的位置使干涉仪发出的球面波的焦点与待测光学系统的焦点重合,干涉仪发出的球面波经过待测光学系统后形成平面波。出射的平面波垂直入射到平面反射镜并原路返回光学系统后进入干涉仪与参考光形成干涉条纹,从而实现对光学系统的检测。
4、该检测方法对检测环境要求严格,而且由于口径超过两米的标准平面镜制造难度大、成本高、加工时间长,并且自身检测困难,其制造成本甚至高于同口径的望远镜系统,因此,限制了其在大口径光学系统检测上的应用。另外,当待测光学系统焦面图像传感器安装完成,且光学系统整体装调结束后,待测光学系统的焦面位置不能再增加其他光路,因此无法使用干涉仪进行自准直检测。
5、目前的波前原位检测技术手段中夏克-哈特曼波前检测技术具有代表性,如美国洛马公司制造的大型光学测试和集成站点(lotis)拥有口径6.5m的主镜。lotis装调完成后先是应用干涉仪进行面形检测,但由于支撑装置的遮挡导致无法得到全口径的波前数据;最后由绑定到主镜上的夏克-哈特曼装置完成主镜的全口径波前原位测量。但是lotis造价高达3500万美元,其中大口径的夏克哈特曼装置的安装加工价格更是不菲。
技术实现思路
1、本发明的目的是解决现有大口径光学系统的波前测量装置制造难度大、成本高,或者测量时对测量环境要求严格的技术问题,而提供一种大口径光学系统的原位波前测量装置及方法。
2、本发明的设计思路是:
3、由于现有的大口径光学系统波前测量装置制造难度大且成本高,因此考虑将大口径的光学系统分割为多个子孔径,对待测光学系统的子孔径进行测量,通过对测量结果的计算拟合,进而得到大口径光学系统的波前数据。
4、为实现上述目的,本发明采用的技术方案为:
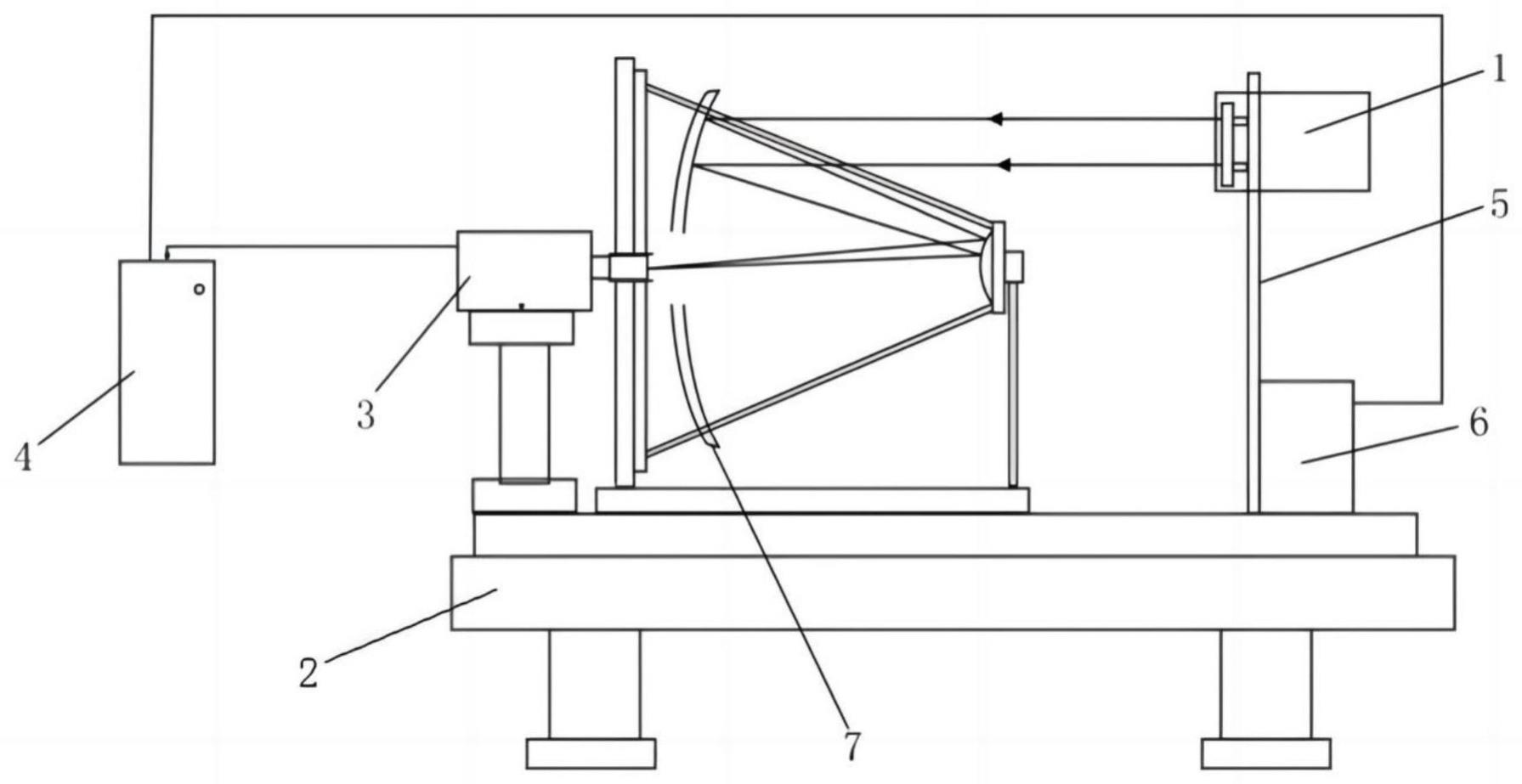
5、一种大口径光学系统的原位波前测量装置,其特殊之处在于:包括位于安装平台2上的数据采集模块3、包括导轨控制模块6的四维平移导轨5,扫描步长规划及数据处理模块4,安装在四维平移导轨5上的平行光管阵列1;
6、所述平行光管阵列1位于待测光学系统7的通光孔径前方,为n×n光管阵列,由n2根口径相同的光管组成,其中相邻光管间的间距一致,用于发射通过待测光学系统7的平行光;
7、所述数据采集模块3位于待测光学系统7的系统焦面,用于采集平行光管阵列1的出射光经过待测光学系统7后形成的光斑;
8、所述扫描步长规划及数据处理模块4分别与导轨控制模块6、数据采集模块3电连接,用于根据待测光学系统7的通光孔径和平行光管阵列1的结构规划平行光管阵列1的扫描步长和扫描路径,并将规划的扫描步长和扫描路径发送至导轨控制模块6,以及接收、处理数据采集模块3采集到的光斑图像,并通过计算得到待测光学系统7的原位波前;
9、所述导轨控制模块6用于控制四维平移导轨5按照扫描步长规划及数据处理模块4发送的控制信号进行移动。
10、进一步地,所述平行光管阵列1中的单根光管的光管口径满足:
11、进一步地,数据采集模块3采用ccd探测器。
12、进一步地,还包括光谱校准模块;
13、所述光谱校准模块包括通过光纤依次连接的标准原子谱线灯8、光纤耦合器9;
14、所述光纤耦合器9的输出端通过光纤连接在所述平行光管阵列1中的一根光管的光源处,用于将标准原子谱线灯8发出的标准波长光传送至该光管的光源处,替代光管的光源发光;
15、所述平行光管阵列1用于出射标准波长的平行光。
16、一种大口径光学系统的原位波前测量方法,基于上述的一种大口径光学系统的原位波前测量装置,其特殊之处在于,包括以下步骤:
17、步骤1、扫描步长规划及数据处理模块4规划平行光管阵列1的扫描步长和扫描路径;
18、步骤2、打开平行光管阵列1,数据采集模块3采集平行光管阵列1的出射光经过待测光学系统7子孔径后形成的光斑,并将采集到的子孔径光斑图像发送至扫描步长规划及数据处理模块4;
19、步骤3、按照步骤1规划的扫描步长和扫描路径,导轨控制模块6控制四维平移导轨5带动平行光管阵列1运动至下一个测量点;
20、步骤4、重复步骤2和步骤3,直至历遍待测光学系统7的通光孔径;
21、步骤5、扫描步长规划及数据处理模块4对接收到的子孔径光斑图像进行处理,确定子孔径光斑质心的坐标,计算测得的待测光学系统7的子孔径波前在x、y方向上的平均斜率mx和my;
22、步骤6、基于测得的待测光学系统7的子孔径波前在x、y方向上的平均斜率mx和my,在zernike多项式添加平行光管阵列1的倾斜项中,基于波面斜率连续的条件,拟合出原位波前。
23、进一步地,所述步骤2具体为:
24、当平行光管阵列1运动到待测光学系统7的中心时,点亮平行光管阵列1中的一根光管,数据采集模块3采集平行光管阵列1的出射光经过待测光学系统7子孔径后形成的光斑,并将采集到的子孔径光斑图像发送至扫描步长规划及数据处理模块4,之后关闭该光管;点亮平行光管阵列1中的另一根光管,重复以上操作,直至平行光管阵列1中的所有光管被点亮过;
25、当平行光管阵列1运动到待测光学系统7的边缘时,平行光管阵列1中超出待测光学系统7通光孔径的部分光管不点亮,其余光管逐一点亮和关闭平行光管阵列1中的所有光管,数据采集模块3采集平行光管阵列1的出射光经过待测光学系统7子孔径后形成的光斑,并将采集到的子孔径光斑图像发送至扫描步长规划及数据处理模块4。
26、进一步地,步骤5具体为:
27、扫描步长规划及数据处理模块4对接收到的子孔径光斑图像依次使用窗口法、阈值法和灰度加权法进行处理,以提取子孔径光斑质心,确定子孔径光斑质心的坐标,通过哈特曼波前检测原理计算计算测得的待测光学系统7的子孔径波前在x、y方向上的平均斜率mx和my。
28、进一步地,所述步骤6具体为:
29、步骤6.1、根据光学系统波像差φ(x,y)以及在平行光管阵列1运动无误差的理想测量条件下各个子孔径的实际波前在x、y方向上的平均斜率sx、sy:
30、
31、
32、
33、其中,z(x,y)为zernike项,c为zernike系数,n为zernike项数,ε为残差,sx、sy分别为子孔径的实际波前在x、y方向上的平均斜率,a为子孔径面积,为子孔径的波前;
34、得到以下公式:
35、
36、其中,sxn为第n个子孔径的实际波前在x方向上的平均斜率,syn为第n个子孔径的实际波前在y方向上的平均斜率,znn(x,y)为第n个子孔径的第n个zernike项,cn为第n个子孔径的zernike系数;
37、令
38、将上述公式表示为zc=s,其中,z为子孔径的zernike项对x、y的求导矩阵,c为子孔径的zernike系数矩阵;
39、步骤6.2、在zernike基底的基础上引入平行光管阵列1的倾斜量矩阵t,则子孔径的实际波前平均斜率s与测得的待测光学系统7的子孔径平均斜率mx和my的关系如下:
40、
41、
42、其中,tx、ty分别为平行光管阵列1在x、y方向上的倾斜量;
43、结合步骤6.1得到的zc=s,得到:
44、
45、其中,d为平行光管阵列1的倾斜项系数矩阵,t为平行光管阵列1的倾斜量矩阵;
46、式中:
47、
48、其中,t为平行光管阵列1的倾斜量矩阵,txn为平行光管阵列1在测量第n个子孔径时在x方向上的倾斜量,tyn为平行光管阵列1在测量第n个子孔径时在y方向上的倾斜量,m为zernike项数;
49、步骤6.3、根据步骤6.2中得到的公式,拟合出子孔径的zernike系数矩阵c,以及平行光管阵列1的倾斜量矩阵t;
50、步骤6.4、利用步骤6.3得到的子孔径的zernike系数矩阵c和平行光管阵列1的倾斜量矩阵t,通过模式法拟合出原位波前。
51、进一步地,步骤1前还包括步骤0:
52、步骤0、调整平行光管阵列1中光管的指向,使每根光管的指向一致:
53、步骤0.1、沿平行光管阵列1出射光束方向依次放置长焦距平行光管10和数据采集模块3;
54、步骤0.2、点亮平行光管阵列1中的任一光管,使其出射光束通过长焦距平行光管10,并利用数据采集模块3记录形成的光斑的位置,之后关闭该光管;
55、步骤0.3、点亮另一根光管,调整其位姿使其出射光束通过长焦距平行光管10形成的光斑与步骤0.2中记录的光斑在同一位置,之后关闭该光管;
56、步骤0.4、重复步骤0.3,直至平行光管阵列1中的所有光管的出射光束经过长焦距平行光管10形成的光斑位置一致,从而使平行光管阵列1中每根光管的指向一致。
57、与现有技术相比,本发明具有的有益技术效果如下:
58、1、本发明提供的大口径光学系统的原位波前测量装置,利用小口径光管组成的平行光管阵列进行原位波前的测量,加工难度小、成本低廉,经济适用,检测精度高;
59、2、本发明提供的大口径光学系统的原位波前测量装置,平行光管阵列中的单根光管的口径满足:可测量到待测光学系统的zernike前37项,保证测量结果的精确;
60、3、本发明提供的大口径光学系统的原位波前测量装置还包括光谱校准模块,对平行光管阵列进行改装即可获得,波前测量模式和光谱校准模式转换方便;
61、4、本发明提供的大口径光学系统的原位波前测量方法,利用小口径光管组成的平行光管阵列测量局部波前,再利用得到的局部波前数据进行子孔径拼接,以实现大口径光学系统的波前原位测量,无需加工难度大,价格高昂的测量装置,在任何环境下都可进行测量;
62、5、本发明提供的大口径光学系统的原位波前测量方法,通过调整相邻检测位置重叠的子孔径的光斑位置的一致性,调整位移后的平行光管阵列指向,以排除运动过程中由于震动等原因产生的平行光管阵列指向性误差,保证测量结果的准确性;
63、6、本发明提供的大口径光学系统的原位波前测量方法,在开始测量前调整平行光管阵列中光管的指向,使每根光管的指向一致,提高检测精度。
- 还没有人留言评论。精彩留言会获得点赞!