一种基于超宽带定位与指纹定位的三维室内定位方法与系统
本发明涉及室内定位,特别涉及一种基于超宽带定位与指纹定位的三维室内定位方法与系统。
背景技术:
1、现如今,随着科技日益进步,电子产品越来越普及,功能也越来越强大,人们对位置信息的需求越来越大,不仅在人们的日常生活方面需要位置的信息,在工业、商业和服务业都对位置的信息有着很大的需求。定位就是确定某人或物体的位置。定位技术根据环境不同又可以分为室外环境下的定位技术和室内环境下的定位技术,这两种技术之间看似相似却大相径庭。首先是环境的不同,室外环境相对空旷,障碍物较少,而室内环境障碍物多,例如墙壁、家具等;其次是维数不同,室外环境下,一般实现二维定位即可,而在室内环境下因为楼房和地下建筑较多,二维定位已经远远不能满足需求;再有对定位精度的要求也不同,室外定位实现“米级”已经可以满足绝大部分普通用户的需求,甚至“十米级”也已足矣,但是在室内环境中的定位对精度要求更高甚至要达到“厘米级”。
2、在室内条件下,障碍物多、环境复杂甚至多维,使得室外定位技术一旦应用到室内环境条件下,使用的精度会出现很大程度的降低,所以室外定位技术无法直接应用到室内。比如说基于gps的定位系统在室内因为卫星和gps接收器之间很难通信,所以很难实现定位。那么,如何实现在复杂的室内环境下获得位置信息,已经成为现今的研究热点,针对不同的局限性需要采取不同的解决方案。
技术实现思路
1、本发明提供了一种基于超宽带定位与指纹定位的三维室内定位方法和系统,用以解决室内定位难,精度不高的问题。
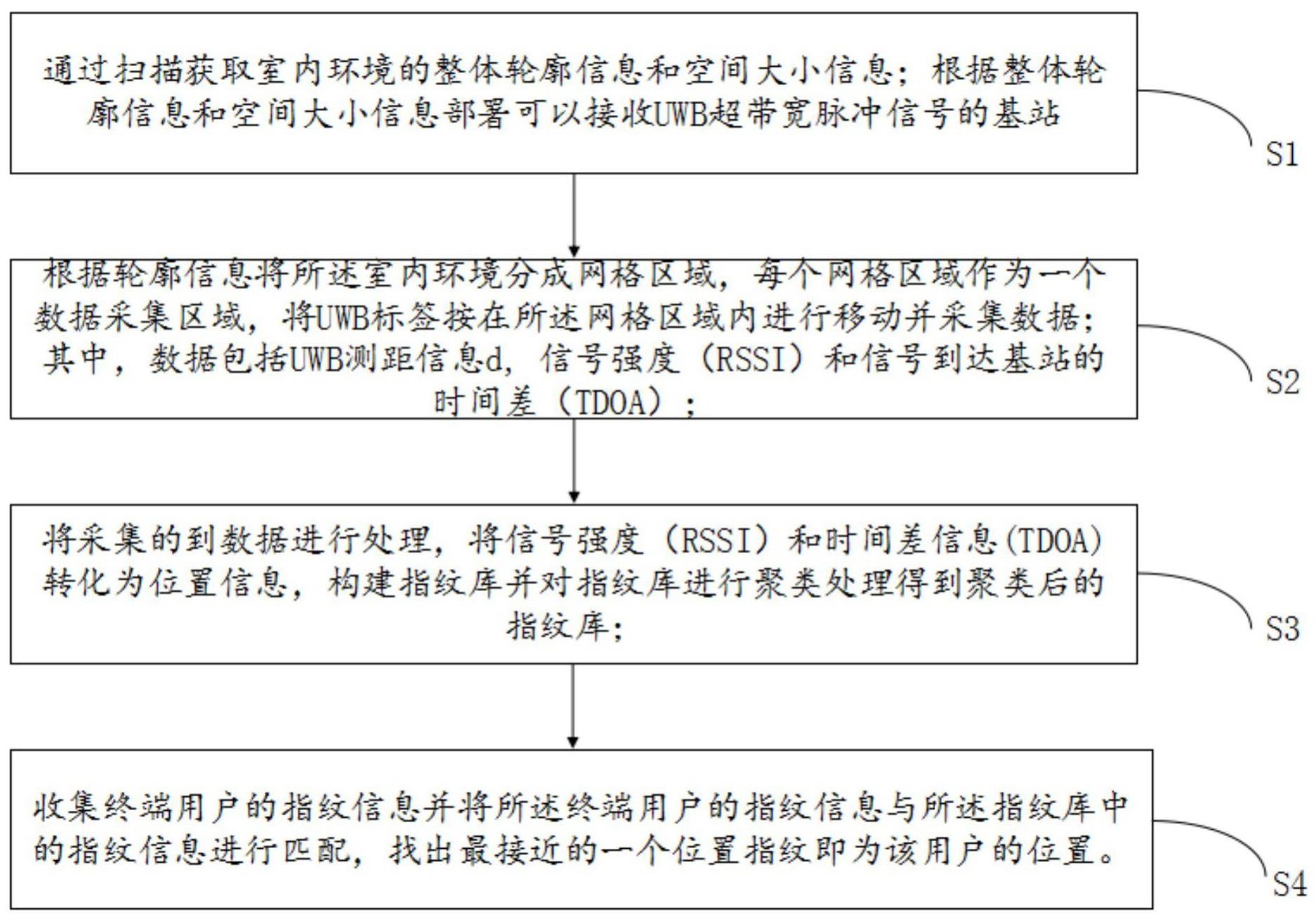
2、本发明提出的一种基于超宽带定位与指纹定位的三维室内定位方法,所述方法包括:
3、s1、通过扫描获取室内环境的整体轮廓信息和空间大小信息;根据整体轮廓信息和空间大小信息部署可以接收uwb超带宽脉冲信号的基站;
4、s2、根据轮廓信息将所述室内环境分成网格区域,每个网格区域作为一个数据采集区域,将uwb标签在所述网格区域内进行移动并采集数据;其中,数据包括uwb测距信息d,信号强度(rssi)和信号到达基站的时间差(tdoa);
5、s3、将采集到的数据进行处理,将信号强度(rssi)和时间差信息(tdoa)转化为位置信息,构建指纹库并对指纹库进行聚类处理得到聚类后的指纹库;
6、s4、收集终端用户的指纹信息并将所述终端用户的指纹信息与所述指纹库中的指纹信息进行匹配,找出最接近的一个位置指纹即为该用户的位置。
7、进一步的,所述通过扫描获取室内环境的整体轮廓信息和空间大小信息,根据整体轮廓信息和空间大小信息部署可以接收uwb超带宽脉冲信号的基站;包括:
8、s101、通过3d扫描仪扫描室内环境得到整体轮廓信息;
9、s102、将得到的整体轮廓信息转化为类似长方体,测量类似长方体的长度、宽度和高度,得到空间大小信息存入数据库;
10、s103、将所述类似长方体以30mx30mx30m的标准进行分区得到正方体的个数n;
11、s104、根据正方体的个数设置基站,并记录基站的位置信息,其中正方体个数为n,基站个数为n+3,基站沿区域边沿设置,四个基站不在一个平面。
12、进一步的,所述根据轮廓信息将所述室内环境分成网格区域,每个网格区域作为一个数据采集区域,将uwb标签在所述网格区域内进行移动并采集数据;其中,数据包括uwb测距信息d,信号强度(rssi)和信号到达基站的时间差(tdoa),包括:
13、s201、根据轮廓信息将所述室内环境分成网格区域;根据环境的不同设置不同的网格标准;
14、s202、将uwb标签在所述网格区域内进行移动,在每个区域内连续采集不低于20组数据,最高100组数据,根据网格内环境不同设置不同的采集位置和采集点数量;采样点的间隔距离不小于20厘米不大于50厘米,每组数据包括距离uwb测距信息d,信号强度和信号到达基站的时间差。
15、进一步的,所述将采集到的数进行处理,将信号强度(rssi)和时间差信息(tdoa)转化为位置信息,构建指纹库,包括:
16、s301、将采集到的数据分别根据所述uwb测距信息d,选择uwb标签距离最近的四个基站的信号强度(rssi)和到达时间差(tdoa)作为每个测试点的基本数据;
17、s302、根据所述基本数据,将所述信号强度rssi和所述uwb测距信息d通过线性回归分析,得出信号强度rssi和uwb测距信息d的线性关系,从而获得uwb标签的rssi定位结果p r;
18、s303、根据所述基本数据,利用到达时间差定位技术对所述uwb标签进行定位,得到基于到达时间差的定位结果p t;
19、s304、将所述信号强度的定位结果p r和所述基于到达时间差定位结果p t进行加权融合,得到最终位置p=ap r+bpt,其中a和b为权重系数;
20、s305、将所述uwb测距信息d、信号强度(rssi)和所述时间差信息(tdoa)作为指纹特征,与所述最终位置信息相对应,录入指纹库;
21、s306、利用meanshit算法将指纹库进行聚类处理得到聚类后的子库和子库的聚类中心;
22、进一步的,所述收集终端用户的指纹信息并将所述终端用户的指纹信息与所述指纹库中的指纹信息进行匹配,找出最接近的一个位置指纹即为该用户的位置,包括:
23、s401、收集终端用户的指纹信息;
24、s402、将所述终端用户指纹信息与子库的聚类中心进行匹配,选取距离最短的聚类中心所在的子库;
25、s403、将所述终端用户指纹信息与距离最短的聚类中心所在的子库进行匹配,算出所述终端用户指纹信息与子库内各个指纹特征的相似度;
26、s404、根据所述相似度排序,选取最接近的指纹特征,该指纹特征对应的位置即为用户的位置。
27、一种基于超宽带定位与指纹定位的三维室内定位系统,所述系统包括:
28、基站设置模块:通过扫描获取室内环境的整体轮廓信息和空间大小信息;根据整体轮廓信息和空间大小信息部署可以接收uwb超带宽脉冲信号的基站;
29、数据采集模块:根据轮廓信息将所述室内环境分成网格区域,每个网格区域作为一个数据采集区域,将uwb标签在所述网格区域内进行移动并采集数据;其中,数据包括uwb测距信息d,信号强度(rssi)和信号到达基站的时间差(tdoa);
30、指纹库建立模块:将采集到的数据进行处理,将信号强度(rssi)和时间差信息(tdoa)转化为位置信息,构建指纹库并对指纹库进行聚类处理得到聚类后的指纹库;
31、终端匹配模块:收集终端用户的指纹信息并所述终端用户的指纹信息与所述指纹库中的指纹信息进行匹配,找出最接近的一个位置指纹即为该用户的位置。
32、进一步的所述的一种基于超宽带定位与指纹定位的三维室内定位系统,其特征在于,所述基站设置模块包括:
33、室内环境获取模块:通过3d扫描仪扫描室内环境得到整体轮廓信息;
34、轮廓信息转化模块:将得到的整体轮廓信息转化为类似长方体,测量类似长方体的长度、宽度和高度,得到空间大小信息存入数据库;
35、环境分割模块:将所述类似长方体以30mx30mx30m的标准进行分区得到正方体的个数n;
36、基站数量设置模块:根据正方体的个数设置基站,并记录基站的位置信息,其中正方体个数为n,基站个数为n+3,基站沿区域边沿设置,四个基站不在一个平面。
37、进一步的,一种基于超宽带定位与指纹定位的三维室内定位系统,所述数据采集模块包括:
38、室内环境分区模块:根据轮廓信息将所述室内环境分成网格区域;根据环境的不同设置不同的网格标准;
39、uwb标签采集模块:将uwb标签在所述网格区域内进行移动,在每个区域内连续采集不低于20组数据,最高100组数据,根据网格内环境不同设置不同的采集位置和采集点数量;采样点的间隔距离不小于20厘米不大于50厘米,每组数据包括距离uwb测距信息d,信号强度和信号到达基站的时间差。
40、进一步的,一种基于超宽带定位与指纹定位的三维室内定位系统,所述指纹库建立模块包括:
41、基站选择模块:将采集到的数据分别根据所述uwb测距信息d,选择uwb标签距离最近的四个基站的信号强度(rssi)和到达时间差(tdoa)作为每个测试点的基本数据;
42、rssi定位模块:根据所述基本数据,将所述信号强度rssi和所述uwb测距信息d通过线性回归分析,得出信号强度rssi和uwb测距信息d的线性关系,从而获得uwb标签的rssi定位结果p r;
43、tdoa定位模块:根据所述基本数据,利用到达时间差定位技术对所述uwb标签进行定位,得到基于到达时间差的定位结果p t;
44、融合定位模块:将所述信号强度的定位结果p r和所述基于到达时间差定位结果pt进行加权融合,得到最终位置p=ap r+bpt,其中a和b为权重系数;
45、信息录入模块:将所述uwb测距信息d、信号强度(rssi)和所述时间差信息(tdoa)作为指纹特征,与所述最终位置信息相对应,录入指纹库;
46、数据库归类模块:利用meanshit算法将指纹库进行聚类处理得到聚类后的子库和子库的聚类中心;
47、进一步基于超宽带的,一种定位与指纹定位的三维室内定位系统,所述终端匹配模块包括:
48、用户信息收集模块:收集终端用户的指纹信息;
49、子类数据库选择模块:将终端用户信息与子库的聚类中心进行匹配,选取距离最短的聚类中心所在的子库;
50、相似度计算模块:将所述户终端指纹信息与距离最短的聚类中心所在的子库进行匹配,算出所述终端用户指纹信息与子库内各个指纹特征的相似度;
51、相似度匹配模块:根据所述相似度排序,选取最接近的指纹特征,该指纹特征对应的位置即为用户的位置。
52、本发明有益效果:本发明提出一种基于超宽带定位与指纹定位的三维室内定位方法和系统,通过这种超宽带和指纹定位融合的三维定位,可以对复杂的室内环境进行定位,例如地下建筑物较多,障碍物较多的情况下,实现精准近距离定位,超宽带定位传输率高,穿透力强,解决了普通无线电技术在传输过程中信号衰减从而影响精度的问题,超宽带定位建立指纹库,实现定位精度高,方便管理。
- 还没有人留言评论。精彩留言会获得点赞!