一种用于高速云雾场的双视场宽域粒径高精度测量装置及方法
本发明属于云雾流场液态水含量测量领域,尤其是一种用于高速云雾场的双视场宽域粒径高精度测量装置及方法。
背景技术:
1、两相流场中液相液滴的精确识别与测量对燃烧基础问题研究、流场特性分析、航空发动机研发设计等起着关键的作用。其中,航空发动机进气条件环境模拟和测量,仍面临诸多技术难题亟需突破。国军标和适航条款对于进气模拟参数控制精度有严格要求,特别是进气云雾流场液态水含量(lwc)、水滴尺寸(mvd)等参数的测量精度。然而,对于高空台的进气环境模拟,当前仍缺乏可靠的云雾参数测量技术,制约了我国航空发动机进气试验考核和适航验证能力。
2、目前,测量液态水含量(lwc)的方法有很多种,主要包括:冰刀法、旋转多圆柱测量法和热线测量法等。冰刀法是国内外常用lwc校测方法,但其总体效率较低,主要用于校测结果间的相互对比验证。旋转多圆柱测量仪是测量水滴参数仪器中最简单、最可靠的仪器,其使用有一定限制:如圆柱表面温度接近或超过0℃时,则无法测量;热线测量法技术成熟,应用最广,其通过水滴与电阻丝发生撞击在其表面蒸发将造成电阻丝温度和阻抗变化,来计算液态水含量的大小,其测量范围通常是10-40μm。
3、国外用于风洞流场中液滴平均容积粒径(mvd)测量的方法主要有四种:前向散射分光测量仪(fssp)、光学阵列测量仪(oap)、相位多谱勒粒子分析仪(pdpa)和马尔文粒径测量仪(mpsa)。前向散射分光测量仪(fssp)广泛用于地面试验设备和飞行试验云测量,若其探头体积中存在过多的小液滴则会导致计数误差和粒径测量误差。光学阵列测量仪(oap)是一种常用的云小水滴直径测量仪器,其量程范围广且型号多,常用于测量直径大于100μm的小水滴。相位多谱勒粒子分析仪(pdpa)由美国气动测量有限公司制造,用于风洞和飞行试验小水滴粒径测量,不适合测量数密度较大的喷雾场,系统对于测试环境要求高,且光路调节繁琐。马尔文粒径测量仪(mpsa)被广泛用于燃料雾化液滴粒径的分析,其在密度场过大的喷雾区测试结果偏差较大,光的多次折射、偏转、晕光现象均会影响测试结果。
4、由于国内飞机研究起步较晚,大多集中在理论研究以及数值模拟方面,到目前为止,国内只有几座风洞,近几年随着我国自主飞行器设计的发展,飞行器的防冰设计需求迅速增长。在云雾场参数测试研究方面,国外专门的光学测试仪器价格昂贵且存在标定困难及测量效率低等问题。国内在高速云雾场lwc、mvd的快速准确测量方面缺乏自主研发的云雾场参数测量方法、仪器装置及测量软件。因此,亟需发展高速云雾场lwc、mvd同步且快速准确测量技术,支撑我国航空发动机进气结冰环境模拟技术开发。
技术实现思路
1、本发明的目的在于克服上述现有技术的缺点,提供一种用于高速云雾场的双视场宽域粒径高精度测量装置及方法。
2、为达到上述目的,本发明采用以下技术方案予以实现:
3、一种用于高速云雾场的双视场宽域粒径高精度测量装置,包括双视场宽域粒径识别装置;
4、所述双视场宽域粒径高精度测量装置包括激光扩束器、光学异倍放大装置和计算机;所述光学异倍放大装置包括分束器,分束器的进光口上连接有一次放大镜,一次放大镜侧设有一次放大镜调倍旋钮,分束器的一个光路出口通过小放大倍数端二次放大镜连接有第一ccd相机,另一个光路出口通过大放大倍数端二次放大镜连接有第二ccd相机,第一ccd相机和第二ccd相机上均设有信号传输接口和电源线,信号传输接口连接有计算机,所述计算机内设有识别模块;所述激光扩束器入口用于接收激光,所述激光扩束器和一次放大镜相对设置,激光扩束器与一次放大镜的光轴在同一水平面内重合,两者之间的距离为50~80cm;
5、当进行识别时,待测的云雾场液滴进入到激光扩束器与一次放大镜之间的检测区域;
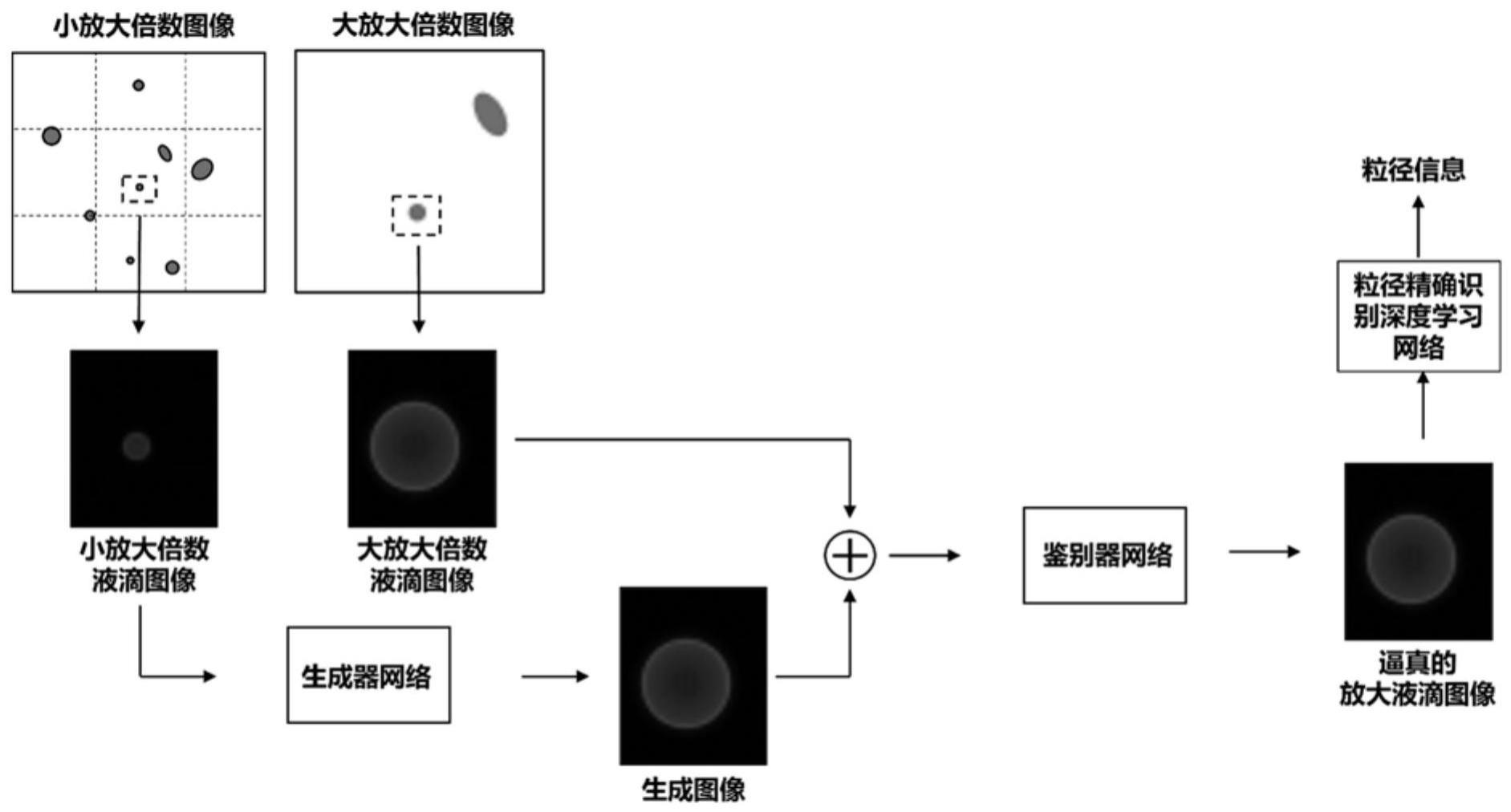
6、识别模块用于接收第一ccd相机和第二ccd相机的采集信号,即同一区域不同放大倍数下的两组图像,基于所述两组图像,将小放大倍数图像中与大放大倍数图像重合的检测区域的图像分割提取,作为小放大倍数处理图像;将小放大倍数处理图像与大放大倍数图像进行图像配准,即获取同一时刻的两张图像中相同位置被识别到的液滴,将所述液滴进行在不同图像中分别进行提取并以固定大小进行存储,分别存储在小放大倍数液滴图像组和大放大倍数液滴图像组;基于条件gan网络,将小放大倍数液滴图像组作为输入,生成逼真放大图像,以大放大倍数液滴图像组作为鉴别对象,判断生成的逼真放大图像与大放大倍数液滴图像组是否一致,不断训练直至建立异倍放大液滴图像间的关联网络模型,使得所述的逼真放大图像与大放大倍数液滴图像组一致;
7、将小放大倍数组内图像中的所有液滴进行分割提取并保存,输入至建立的异倍放大液滴图像的关联网络模型中,生成逼真的放大液滴图像;
8、构建resnet神经网络,将标定数据库中的标定图像输入resnet神经网络,建立液滴粒径的精确识别网络;
9、将所述逼真放大液滴图像输入所述精确识别网络中,获得小放大倍数图像组内图像中每个液滴的粒径信息;
10、基于所述粒径信息计算云雾场来流参数lwc和mvd。
11、进一步的,所述激光扩束器入口处的激光由nd:yag激光器经过两级反射得到。
12、一种用于高速云雾场的双视场宽域粒径高精度测量方法,包括以下步骤:
13、(1)将蚀刻圆形标定板安装于激光扩束器与一次放大镜之间,蚀刻圆形标定板所在平面与激光扩束器激光出口截面平行,调整光学异倍放大装置的小放大倍数端二次放大镜和光学异倍放大装置的大放大倍数端二次放大镜,使得两者的测试区域分别在预设区域,固定小放大倍数端二次放大镜和大放大倍数端二次放大镜的放大倍数参数,进行静态标定;
14、通过三维微位移平台控制蚀刻圆形标定板移动,以获取不同粒径微粒在在焦、正离焦及负离焦三个不同状态下的标定数据库,通过第一ccd相机和第二ccd相机进行图像采集,存储于计算机中;
15、(2)拆卸蚀刻圆形标定板和三维微位移步进平台,移动上述的用于高速云雾场的双视场宽域粒径高精度测量装置,使待测云雾场液滴分布在激光扩束器与一次放大镜之间的检测区域;
16、(3)利用第二ccd相机和第一ccd相机分别采集小放大倍数端和大放大倍数端的图像数据,分组保存于计算机;
17、(4)获取第一ccd相机和第二ccd相机的采集信号,即同一区域不同放大倍数下的两组图像,基于所述两组图像,将小放大倍数图像中与大放大倍数图像重合的检测区域的图像分割提取,作为小放大倍数处理图像;将小放大倍数处理图像与大放大倍数图像进行图像配准,即获取同一时刻的两张图像中相同位置被识别到的液滴,将所述液滴进行在不同图像中分别进行提取并以固定大小进行存储,分别存储在小放大倍数液滴图像组和大放大倍数液滴图像组;基于条件gan网络,将小放大倍数液滴图像组作为输入,生成逼真放大图像,以大放大倍数液滴图像组作为鉴别对象,判断生成的逼真放大图像与大放大倍数液滴图像组是否一致,最终建立异倍放大液滴图像间的关联网络模型,使得所述的逼真放大图像与大放大倍数液滴图像组一致;
18、将小放大倍数组内图像中的所有液滴进行分割提取并保存,导入至建立的异倍放大液滴图像的关联网络模型中,生成逼真的放大液滴图像;
19、构建resnet神经网络,将标定数据库中的标定图像导入网络,建立液滴粒径的精确识别网络;
20、将所述逼真放大液滴图像导入所述精确识别网络中,获得小放大倍数图像组内图像中每个液滴的粒径信息;
21、基于所述粒径信息计算云雾场来流参数lwc和mvd。
22、进一步的,步骤(4)中,所述粒径信息用于计算云雾场来流参数lwc具体为:
23、
24、式中,vcsa为相机拍摄区域,为拍摄区域内第i个被识别到的液滴的体积;
25、vcsa=scsa·dmax (2)
26、式中,dmax为视域内液滴的最大粒径值,scsa为由相机像素及放大倍数觉得的视域面积;
27、
28、式中,di为第i个被识别到的液滴的粒径;
29、进一步的,步骤(4)中,所述粒径信息用于计算云雾场来流参数mvd,具体为
30、
31、式中,n为视域内全部液滴的总数目。
32、进一步的,步骤(1)中,小放大倍数端的测试区域达到1mm3以上。
33、进一步的,步骤(1)中,大放大倍数端的测试粒径分辨率达到1μm以下。
34、与现有技术相比,本发明具有以下有益效果:
35、本发明提供一种用于高速云雾场的双视场宽域粒径高精度测量装置及方法,基于光学异倍放大装置同步获取不同放大倍数的相同视域液滴可视化图像,利用resnet神经网络-gan网络双网络耦合识别算法实现高速云雾场中液滴粒径的高精度测量,从而解决传统风洞云雾场参数测量装置时间响应性差、测量精度低、回溯算法可靠性低以及无法快速测量等问题;同时,采用光学异倍放大装置捕捉光学图像,能够同时满足液滴粒径与大视域的测试需求,解决了传统阴影法技术中液滴粒径范围广、测量视域大、空间分辨率高难以兼顾的难题;而采用resnet神经网络-gan网络双网络耦合识别进行标定数据的学习以及不同放大倍数液滴图像关联关系的构建,能够利用大规模数据,充分提取图像中的潜在特征,避免传统图像测量技术中对灰度等参数的过度依赖以及限制,从而提升测试精度;本发明采用可视化测量技术,测量结果精度高,测量过程具有明确的物理依据;本发明所提出的装置,结构简单、模块化设计、可搬运,适用于不同气速的气流条件,云雾场宽粒径范围和大视域内lwc、mvd的高精度快速测量。
- 还没有人留言评论。精彩留言会获得点赞!