基于并行2DCNN-CBAM和雷达多域表征的毫米波雷达跌倒检测方法及系统
本发明涉及雷达信号处理中的跌倒检测,特别是一种基于并行2dcnn-cbam和雷达多域表征的毫米波雷达跌倒检测方法。
背景技术:
1、跌倒检测是雷达信号处理及应用领域中的一个重要研究方向,据国家社会科学基金项目研究显示,在我国,中老年人跌倒发生率为20.8%。在日常生活中,浴室,卧室以及客厅等私密场所空间环境复杂,潜在跌倒隐患较多,这对跌倒检测技术提出了更高的要求。目前,跌倒检测技术主要由以下三种途径实现:基于佩戴式设备的人体跌倒检测技术、基于光学传感器的人体跌倒检测技术以及基于雷达的人体跌倒检测技术。
2、基于佩戴式设备的人体跌倒检测技术通过加速度计、陀螺仪等传感器判断佩戴者是否发生跌倒,易对测试者造成行动不便等客观意义上的困扰;基于光学传感器的人体跌倒检测技术能够做到针对室目标的成像精度较高,但其缺点是不仅会受到环境亮度的影响,无法保证跌倒检测的准确率,且光学设备在采集人体动作信息时会侵犯用户的日常生活隐私,导致该技术并不适用于家中等用户对日常生活隐私要求高的场景。而基于雷达的人体跌倒检测技术,由于雷达本身所具有的传输特性,使得雷达在监测时既不会受到室内光线等环境因素的影响,同时也不会侵犯用户的日常生活隐私,但缺点为雷达设备的成像效果亟待提高,且目前传统检测技术是将雷达回波信号处理结果与逻辑判断相结合,从而实现目标跌倒检测。但其存在检测成功率不高且伴随虚警等问题。少类人体运动表征与特征细节表达不完备,是制约雷达跌倒检测技术准确率的最重要因素。
3、有效解决跌倒检测虚警漏警问题的关键是将多域目标运动表征与深度学习相融合来进行跌倒检测。多域目标运动表征即通过雷达信号处理从不同域上获取具有不同物理含义的目标的互补表征。使目标的运动特征不仅仅局限于微多普勒特征等传统表征,同时包含具有其它物理含义的表征。仅使用单一表征可能会导致跌倒动作和其余相似动作具有相同的特征区间,从而在判断时造成虚警、漏警问题,使用多域表征能够从不同域、不同角度考量目标当前的动作情况。逻辑判断是一个主观、人工的特征判断思维,因此无法在最大程度上提取并利用特征信息,使用深度学习则是针对逻辑判断无法充分发掘表征中蕴含的丰富特征信息。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于并行2dcnn-cbam和雷达多域表征的毫米波雷达跌倒检测方法,该方法利用无用户隐私侵犯、跌倒动作高识别率、且能够进一步解决检测中虚警和漏警问题的基于并行2dcnn-cbam和雷达多域表征的毫米波雷达跌倒检测方法。
2、为达到上述目的,本发明提供如下技术方案:
3、本发明提供的基于并行2dcnn-cbam和雷达多域表征的毫米波雷达跌倒检测方法,包括以下步骤:
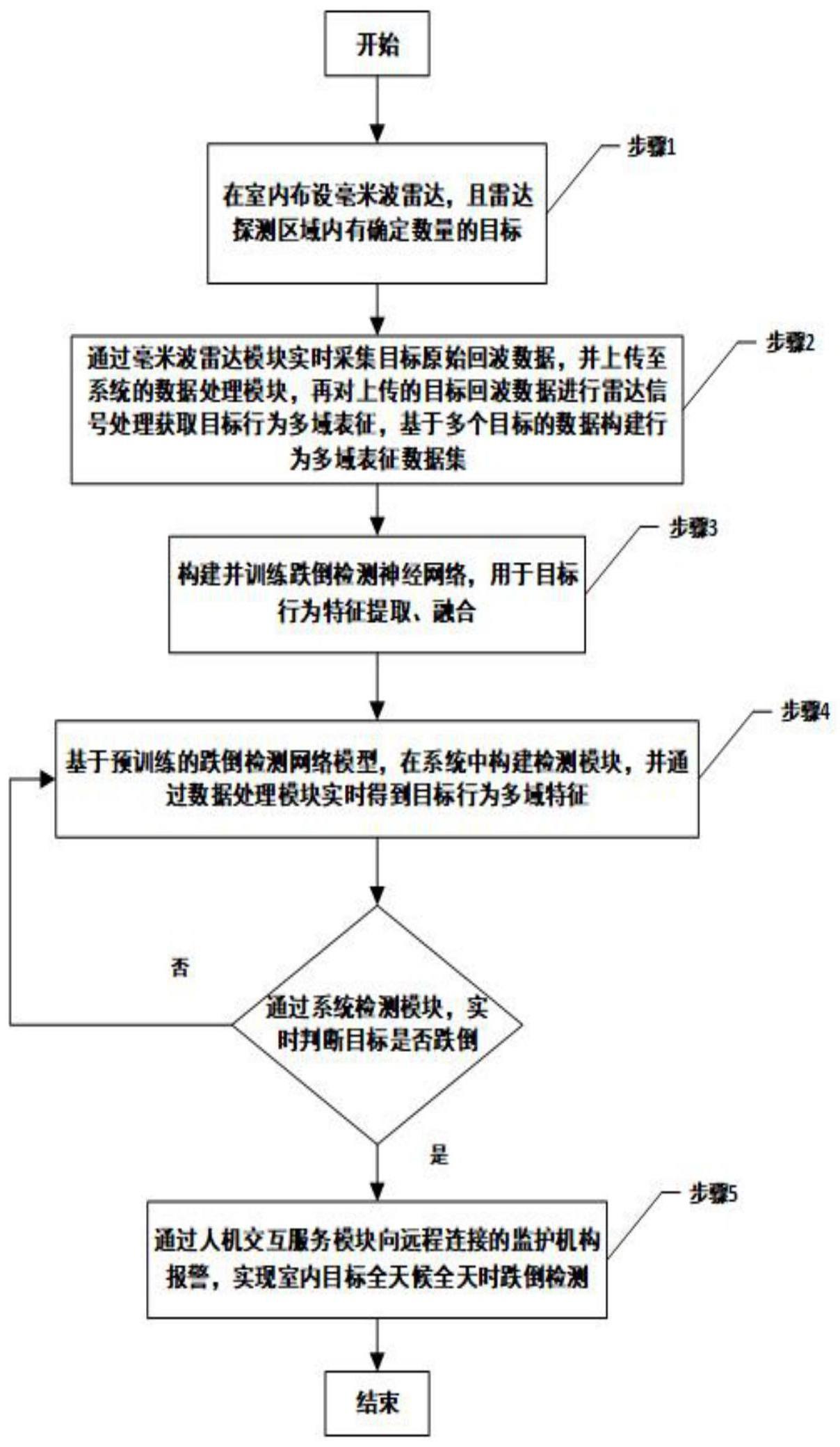
4、(1)设置毫米波雷达并通过毫米波雷达实时采集目标原始回波数据;
5、(2)将目标原始回波数据上传并进行处理获取目标行为多域表征,基于多个目标的数据构建行为多域表征数据集;所述多域表征包括目标的时间-距离表征、时间-速度表征、时间-角度表征、运动状态表征;
6、(3)构建并训练跌倒检测神经网络,所述跌倒检测神经网络用于提取目标行为特征并对特征进行融合处理;根据时间-距离表征、时间-速度表征、时间-角度表征、运动状态表征4个特征进行融合处理;
7、(4)基于预训练的跌倒检测神经网络得到目标行为多域特征,并根据多域特征实时判断目标是否跌倒;
8、若是,则进入步骤5;
9、若否,则返回步骤4;
10、(5)发送目标跌倒报警信号。
11、进一步,步骤(2)具体为:
12、(21)基于目标的雷达原始回波数据,计算获取相应的雷达中频信号,再通过脉冲压缩获取目标的时间-距离表征;
13、(22)通过doppler-fft获取目标的时间-速度表征;
14、(23)通过capon波束形成获取目标的时间-角度表征;
15、(24)通过目标状态更新获取目标的时间-速度-距离三维图,通过选取截面的方式,获取目标的运动状态表征。
16、进一步,步骤(21)具体为:
17、根据雷达测距原理,利用时间延迟τc(t)即可计算得到目标对象与毫米波雷达之间的距离,进而计算得到目标的时间-距离表征。
18、进一步,步骤(22)具体为:
19、利用目标距离轮廓的变化可以提取出目标的速度信息,并进行多通道累积的形式,进而计算得到目标的时间-速度表征vp。
20、进一步,步骤(23)具体为:
21、通过卡宾波束形成估计目标的时间-角度表征,按照以下公式计算:
22、i(θ,m)=a(θ)rxma′(θ)
23、
24、
25、其中,i(θ,m)表示θ处的第m个chirp中的目标回波信号强度,
26、rxm表示第m个chirp处的距离谱rpm的自相关矩阵;
27、a(θ)表示导向矢量;θ表示信号的到达方向;c表示光速;d表示天线阵列间距;n表示天线个数;rpm表示距离谱;
28、进一步,步骤(24)具体为:
29、利用距离表征rp和速度表征vp提取目标的运动信息,并通过阈值限定以及滑窗的方式更新目标的运动状态信息,进而计算得到目标的运动状态表征。
30、进一步,步骤(3)具体为:
31、(31)构建并行2dcnn-cbam跌倒检测识别网络;
32、(32)将步骤(2)中获取的多域表征数据集作为网络输入,进行网络参数迭代更新以及模型训练,最后构成实时跌倒检测系统。
33、进一步,步骤(31)具体为:
34、利用2dcnn网络提取相应的时间-距离、时间-速度、时间-角度以及运动状态表征的空间纹理特征,再利用cbam注意力模块对经由并行2dcnn提取出的多域特征进行信息筛选,选择出其中蕴含的重要特征并且抑制无关的细节,并将优化后的多域特征进行融合,再送入分类器中进行行为识别。
35、本发明提供的基于并行2dcnn-cbam和雷达多域表征的毫米波雷达跌倒检测系统,包括电源模块、系统检测模块、数据处理模块、毫米波雷达模块和人机交互服务模块;
36、所述电源模块,用于为整个毫米波雷达跌倒检测系统提供所需能源;
37、所述系统检测模块,用于对上传的目标行为多域表征数据进行识别,实时判断目标是否跌倒;
38、所述数据处理模块,用于对上传的目标回波数据进行雷达信号处理获取目标行为多域表征;
39、所述毫米波雷达模块,用于通过雷达实时采集目标原始回波数据;
40、所述人机交互服务模块,用于实时监测结果展示。
41、进一步,所述数据处理模块设置有并行2dcnn-cbam跌倒检测识别网络;所述并行2dcnn-cbam跌倒检测识别网络包括输入层、特征提取层和分类层;
42、所述输入层,用于将生成的目标行为多域表征数据集转化为适配神经网络的数据流,以便送入跌倒检测识别网络进行后续操作;
43、所述特征提取层,用于全方位提取并学习多域表征数据集中的行为特征,重点关注跌倒有别于其他动作的细微差别;
44、所述分类层,用于检验网络学习成果,并生成跌倒检测网络模型。
45、本发明的有益效果在于:
46、本发明提供的基于并行2dcnn-cbam和雷达多域表征的毫米波雷达跌倒检测方法。针对雷达回波信号,通过利用脉冲压缩、doppler-fft、capon波束形成和目标状态更新的方法对目标行为进行4种不同域上的研究,利用不同域上的互补特征构成目标的多域表征,然后将获取得到的特征图像送入并行2dcnn-cbam进行识别。该网络结构首先利用并行2dcnn独立地从相应类型的表征中提取特征细节,然后将得到的单类特征分别通过对应的cbam进行筛选和优化,最后对4种不同域的特征进行融合,据此通过并行网络结构实现对目标行为的多域表征。该方法能够精准识别多种干扰动作、保护用户隐私、不易受环境影响,并且能够进一步有效降低检测过程中虚警和漏警概率。
47、本方法仅使用毫米波雷达完成检测,保障用户隐私,且不易受环境影响,提高了检测的安全性以及稳定性;此外,针对雷达回波信号,从4个不同域上进行目标行为研究,生成对应的互补特征,实现目标行为多域表征;同时,设计名为2dcnn-cbam的网络来同时进行特征提取及优化。提高了关键组件对跌倒识别的贡献。不同域互补特征的融合能在保证系统高精度检测目标跌倒动作的同时,有效解决检测中的虚警和漏警问题。
48、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!