一种基于长短时记忆网络的智能终端GNSS干扰检测算法
本发明属于卫星导航,具体涉及一种基于长短时记忆网络的智能终端gnss干扰检测算法。
背景技术:
1、得益于全球卫星导航系统(global navigation satellite system,gnss)具有全天候连续提供全球高精度定位导航的能力,gnss已经渗透到了社会生产、生活的各个方面,从交通、通信,到金融、国防,几乎所有领域都有gnss的参与,gnss逐渐成为人们日常生活不可或缺的一部分。欧盟2021年的eusoa eo and gnss market report市场报告中指出,从2021年到2031年,未来十年间gnss接收器的年出货量将从18亿台增长到25亿台,其中智能手机以及穿戴设备占据约92%的全球出货量。智能手机gnss定位功能将广泛应用于出行、旅游、健康等位置服务(location based services,lbs)市场,我们现在和未来将一直生活在搭建于手机gnss位置服务的网络平台之上。随着智能手机gnss服务的日益增长,用户对于智能手机gnss位置服务的需求也在不断上升,用户希望智能手机在提供车道级的高精度定位结果的同时,也能够保证定位结果的可靠性。然而,当前智能手机gnss位置服务缺乏明确的可靠性提示,尤其在受到干扰(包括环境干扰和人为干扰)的情况下,定位结果会出现极大的误差,甚至出现错误的结果,这对于用户来说是不可接受的。
2、gnss的定位精度取决于卫星数量和基于卫星几何的精度因子(dop),实际上dop值和接收到的卫星信号数量取决接收机所处的环境。在gnss定位中,被障碍物阻挡的卫星会发射反射和衍射信号,这些非视距信号(non line of sight,nlos)会导致较大的定位误差。nlos多径误差效应高度依赖于gnss接收器附近地理特征的形状和几何形状。因此,这种影响无法通过试图消除gnss定位中的大多数误差的差分gnss技术来解决。因而针对环境nlos干扰的探测识别,对于智能手机提供高精度gnss定位导航服务至关重要。目前,nlos探测方法追主要可分为:基于3d城市模型的阴影匹配法和射线追踪法、通过引入鱼眼相机和lidar等硬件辅助nlos探测、以及基于卫星信号特征分析的方法,然而这些方法存在硬件成本高、复杂度高、不适应手机应用场景等众多问题,针对智能手机的nlos探测探测技术仍有待开发。
3、除了因环境导致的nlos干扰外,近年来针对gnss欺骗干扰也日益增多,欺骗和反欺骗机制是现代gnss应用中的新兴问题,引起了国内外研究人员的广泛关注。gnss信号由于存在接收功率低、信号结构公开、信号传播路径复杂等问题,其安全性一直面临着诸多威胁。其中,欺骗干扰对gnss的威胁最严重、破坏性最强。欺骗是一种蓄意干扰,旨在迫使gnss接收器生成错误的位置/导航解决方案。欺骗者通过伪造gnss信号,从而误导目标用户,使其获得错误的pvt信息。相比于传统的电磁干扰攻击,欺骗攻击的威胁在于,其隐蔽性很高,而且能够让目标接收机不至于失锁,还可以控制目标接收机的轨迹。对于欺骗干扰的检测方法主要有以下四大类:信号验证加密技术、信号特征检测技术、多源传感器辅助信息检测技术以及通过机器学习方法。这些方法受限于手机硬件成本以及实际应用场景限制,往往也缺乏实用性。
4、对于智能手机gnss定位可靠性威胁最大的就是由环境导致的非直射信号nlos干扰以及人为的电磁欺骗干扰。当前对于智能手机nlos干扰以及电磁欺骗干扰的研究是独立进行的,无法针对智能终端统一检测nlos干扰以及欺骗干扰的gnss干扰检测。
技术实现思路
1、为解决上述技术问题,本发明提供一种基于长短时记忆网络的智能终端gnss干扰检测算法,以解决现有技术中的问题,为实现上述发明目的,本发明所采用的技术方案是:
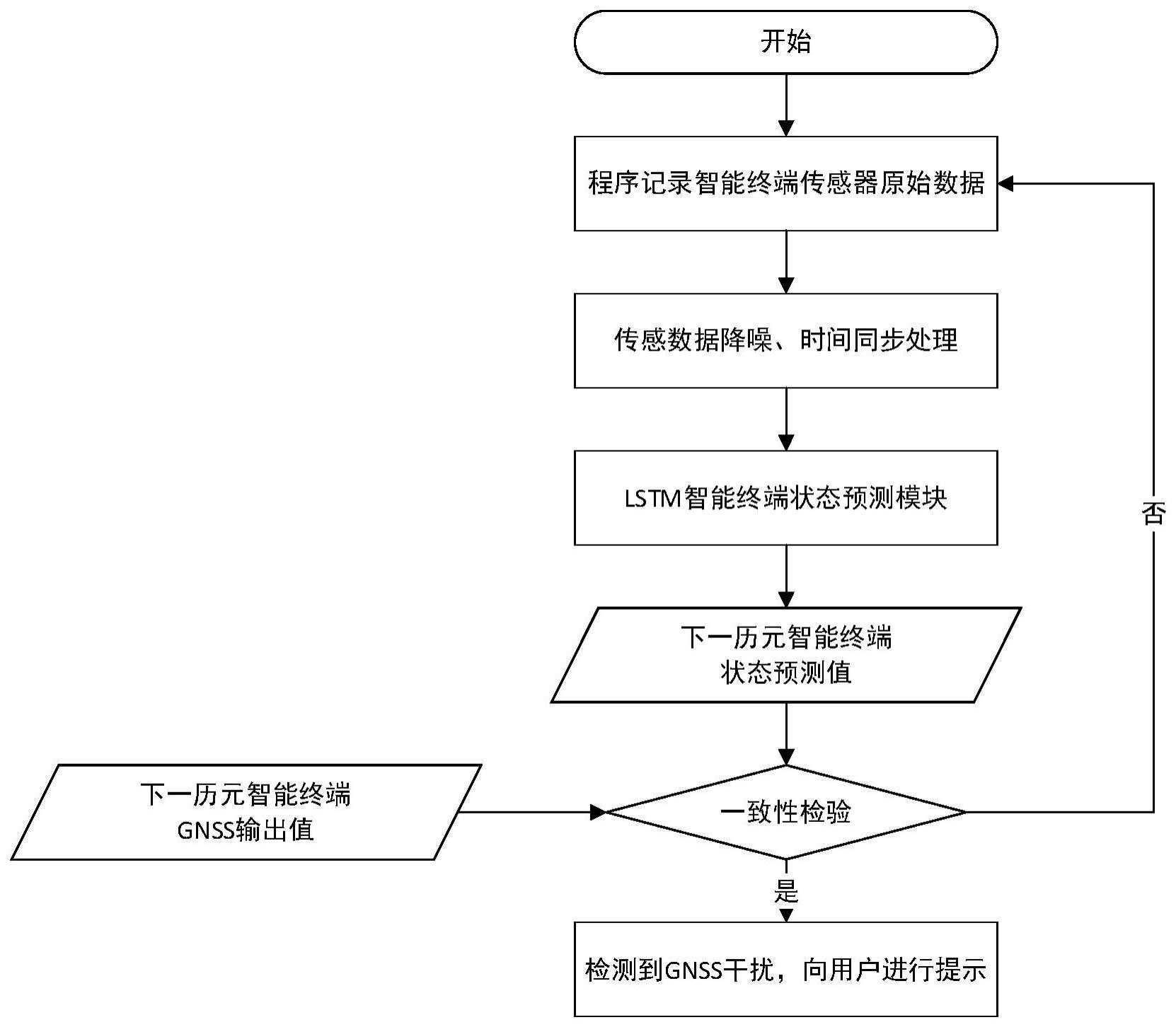
2、一种基于长短时记忆网络的智能终端gnss干扰检测算法,包括如下步骤:
3、第一步:接收智能手机多源传感器数据;
4、第二步:对智能终端多源传感器数据进行降噪、同步预处理,输入到智能终端状态预测模块;
5、第三步:基于长短时记忆网络的智能终端状态预测模块,通过当前历元的输入预测下一历元智能手机位置状态;
6、第四步:智能手机gnss实际输出的结果与预测的结果进行一致性检验;
7、第五步:一致性检验通过,继续进行下一历元的判断;一致性检验未通过,向用户提示受到gnss干扰。
8、进一步的,第一步中,智能手机多源传感器包括gnss、加速度计、陀螺仪、气压计和磁力计。
9、进一步的,第二步中,通过样条插值方法,将其他传感器的数据降噪并同步到gnss数据上。
10、进一步的,样条插值方法包括:
11、对于待插值函数f(x),已知节点x0,x1,……xn处的函数值,将相邻两节点进行分段,获得n个插值小区间,在每个区间内使用k次多项式si(x)插值,使其满足插值条件与k-1阶平滑性:
12、si(xi)=f(xi),si(xi+1)=f(xi+1)
13、
14、进一步的,第三步中,将预处理后的数据按照时间步分批输入lstm网络,进行隐特征提取,基于lstm网络提取的特征,全连接层预测下一历元智能终端位置状态信息。
15、进一步的,lstm网络中包括若干lstm神经单元,对于每一个lstm神经单元,输入当前时刻的数据xt,上一个时刻lstm神经单元的输出ht-1及上一个lstm神经单元隐含的记忆状态ct-1,对应输出为当前时刻的输出值ht及当前时刻lstm神经单元的记忆状态ct。
16、进一步的,lstm神经单元包括三个门控状态:遗忘门、输入门和输出门;
17、其中遗忘门对上一时刻的记忆状态ct-1进行筛选保留,输入门决定了当前时刻的数据输入xt有多少能够被记忆单元记忆,输出门控制记忆单元ct有多少能够输出到当前时刻的输出ht中;
18、每个门的状态按照如下公式进行更新:
19、遗忘门:ft=σ(wf·[ht-1,xt]+bf)
20、输入门:it=σ(wi·[ht-1,xt]+bi)
21、细胞状态:
22、
23、输出门:ot=σ(wo·[ht-1,xt]+bo)
24、ht=ot*tanh(ct)
25、其中,wf,wi,wc,wo表示权重矩阵,bf,bi,bc,bo表示偏置向量,tanh表示双曲正切激活函数,σ表示sigmoid激活函数,方括号表示向量拼接。
26、本发明具有以下有益效果:
27、相较于传统的nlos探测以及欺骗干扰检测方法,本发明在时效性、有效性和经济性等方面有着明显优势,而且无需改造终端、无需借助高精度3d地图、用户体验度、满意度高,具体表现为:
28、(1)、时效性高,本方案采用基于长短时记忆网络的智能终端状态预测模块实时预测下一历元智能终端位置状态,与gnss输出结果进行实时检验,可快速检测智能终端检测到的gnss干扰;
29、(2)、无需对终端进行改造,与使用抗干扰天线、专业抗干扰gnss芯片等的方式相比,本发明无需对终端做任何的硬件改造,在市面上消费级智能终端上均能部署;
30、(3)、无需高精度3d城市模型,可应用于市面上全部智能终端,相较于利用高精度3d城市模型进行nlos信号探测的方法,本方案不依赖高精度3d城市模型,无需提前建立高精度3d城市模型,适用性强;
31、(4)、提升用户体验,用户在未增加任何附件的条件下,程序可有效检测智能终端是受到gnss干扰并向用户进行提示,保证用户gnss定位结果的精度与可靠性,用户的使用体验可以得到极大的提升;
32、(5)、社会和经济效益高,由于智能终端抗干扰能力的显著提升,可有效支持终端上的应用系统性能及服务能力的提升,具有较大的社会效益和经济效益。
- 还没有人留言评论。精彩留言会获得点赞!