一种汽车衡称量检测系统及方法与流程
本发明实施例涉及称重技术,尤其涉及一种汽车衡称量检测系统及方法。
背景技术:
1、在各类生产型企业特别是钢铁企业等,车辆称量目前己基本实现现场无人看管的自动称量。目前汽车衡称量过程人员监控设备,例如主要有红外探测器、超声波雷达、生命探测仪及摄像头,主要是从车外对车内人员进行检测,由于利用上述监控设备从车外对车内人员进行检测时,会受到复杂环境条件下的影响,导致从车外对驾驶室内人员探测准确率较低;因而,现场无人看管的自动称量对车辆称量过程的检测准确率具有更高的要求,亟需设计一种汽车衡称量检测系统,能提高实时智能监控车辆称量的准确性。
技术实现思路
1、本发明提供一种汽车衡称量检测系统及方法,提高了对驾驶室内人员的探测准确率,同时本方案还实现了称量检测系统的智能化设计。
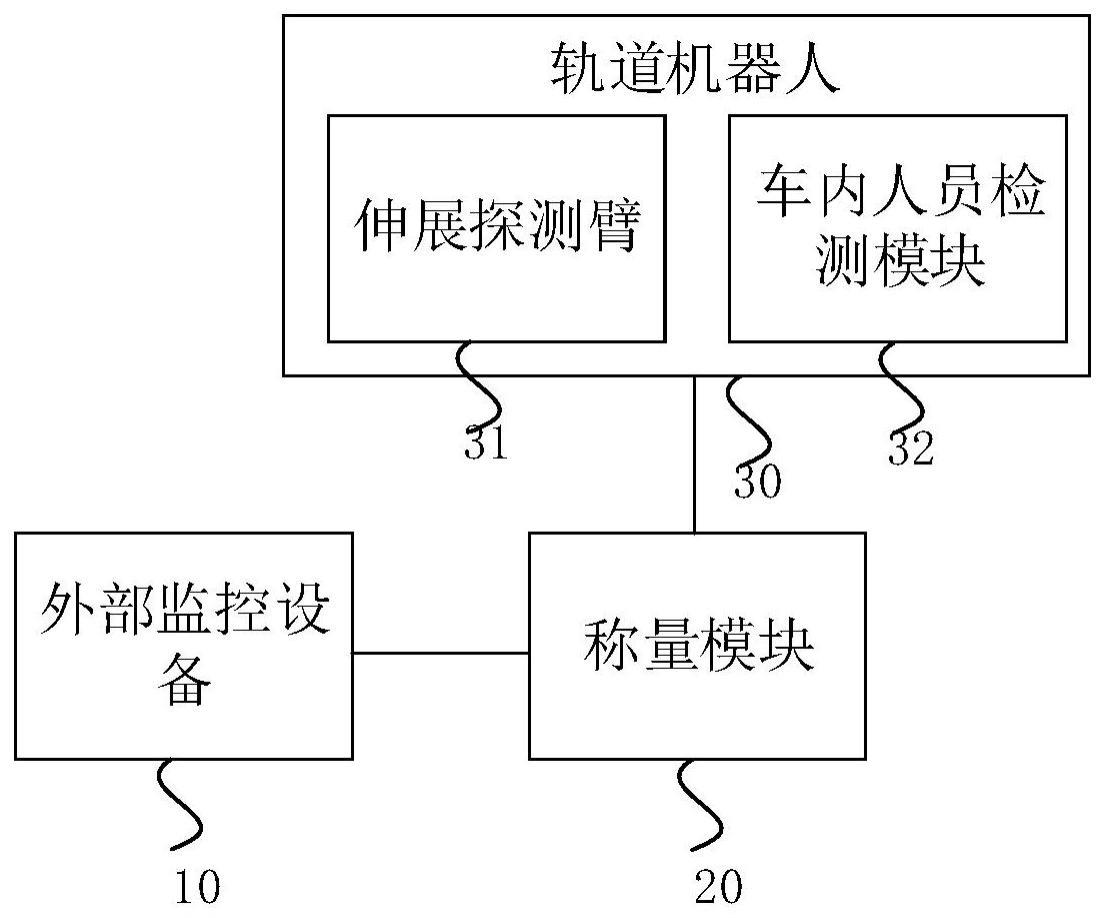
2、第一方面,本发明实施例提供了一种汽车衡称量检测系统,该系统包括:外部监控设备、称量模块及轨道机器人;所述外部监控设备与所述称量模块通讯连接,所述称量模块与所述轨道机器人通讯连接;
3、所述外部监控设备,用于识别待称重车辆的车辆信息及称重区域内的外部移动对象;
4、所述称量模块,用于根据所述车辆信息判断是否满足称量要求;若满足称量要求,控制道闸打开;并当检测到重量信号,发送检测指令至所述轨道机器人;
5、所述轨道机器人包括至少一个伸展探测臂及车内人员检测模块;所述车内人员检测模块设置在所述伸展探测臂上;所述轨道机器人,用于根据所述检测指令将所述伸展探测臂打开以使所述车内人员检测模块探测车内是否有人员下车;
6、所述称量模块,用于当所述车内人员检测模块探测到车内有人员下车及所述外部监控设备未识别到称重区域内的外部移动对象,确定所述待称重车辆的称量数据。
7、可选的,所述轨道机器人还包括可移动轨道、驾驶室检测模块及方向盘锁定检测模块;
8、至少一个所述伸展探测臂包括第一伸展探测臂和第二伸展探测臂;所述方向盘锁定检测模块设置于所述第二伸展探测臂上;所述车内人员检测模块设置于所述第一伸展探测臂上;
9、所述驾驶室检测模块,用于根据所述检测指令检测待称重车辆的驾驶室;
10、所述轨道机器人,还用于当检测到待称重车辆的驾驶室时,沿所述可移动轨道运动;并当所述轨道机器人与所述待称重车辆的驾驶室保持预设距离时,将所述第二伸展探测臂打开以使所述方向盘锁定检测模块检测驾驶室内的方向盘位置;
11、所述轨道机器人,具体用于当所述方向盘锁定检测模块检测到驾驶室内的方向盘位置时,将所述第一伸展探测臂打开以使所述车内人员检测模块探测车内是否有人员下车。
12、可选的,所述轨道机器人还包括:补光模块、测距模块及障碍物检测模块;
13、所述第一伸展探测臂及所述第二伸展探测臂上均设置有所述补光模块、所述测距模块及所述障碍物检测模块;
14、所述补光模块,用于根据环境光线亮度开启或关闭;所述测距模块,用于检测所述轨道机器人与所述待称重车辆的驾驶室的距离;所述障碍物检测模块,用于检测所述第一伸展探测臂及所述第二伸展探测臂伸展方向上的障碍物。
15、可选的,所述轨道机器人还包括:报警模块及语音播报模块;
16、所述报警模块,用于当所述车内人员检测模块探测车内无人员下车,则发出报警信号;
17、所述语音播报模块,用于当所述车内人员检测模块探测车内无人员下车,则播报人员下车动作提示信息;或当当所述车内人员检测模块探测车内人员已下车,则播报称量工作提示信息。
18、可选的,所述汽车衡称量检测系统还包括:信息显示屏及压边检测模块;
19、所述信息显示屏,用于显示所述外部监控设备的识别信息;还用于显示所述车内人员检测模块探测结果;还用于显示所述待称重车辆的称量数据;
20、所述压边检测模块,用于确定所述待称重车辆是否在车辆称重区域内,并将所述待称重车辆是否在车辆称重区域内的确认信息发送至所述称量模块;
21、所述称量模块,具体用于当所述车内人员检测模块探测到车内有人员下车、所述待称重车辆在车辆称重区域内,且所述外部监控设备未识别到所述车辆称重区域内的外部移动对象,确定所述待称重车辆的称量数据。
22、可选的,所述轨道机器人还包括:车辆移动侦测摄像头;
23、所述车辆移动侦测模块,用于根据所述检测指令检测待称重车辆的移动情况;
24、所述轨道机器人,具体还用于当检测到待称重车辆的驾驶室时,且所述待称重车辆不移动,沿所述可移动轨道运动。
25、第二方面,本发明实施例还提供了一种汽车衡称量检测方法,该方法应用于上述第一方面所述的汽车衡称量检测系统,所述汽车衡称量检测方法包括:
26、所述外部监控设备识别待称重车辆的车辆信息及可称重区域内的外部移动对象;
27、所述称量模块根据所述车辆信息判断是否满足称量要求;若满足称量要求,控制道闸打开;并当检测到重量信号,发送检测指令至所述轨道机器人;
28、所述轨道机器人根据所述检测指令将所述伸展探测臂打开以使所述车内人员检测模块探测车内是否有人员下车;
29、所述称量模块当所述车内人员检测模块探测到车内有人员下车及所述外部监控设备未识别到称重区域内的外部移动对象,确定所述待称重车辆的称量数据。
30、可选的,所述轨道机器人还包括可移动轨道、驾驶室检测模块及方向盘锁定检测模块;至少一个所述伸展探测臂包括第一伸展探测臂和第二伸展探测臂;
31、发送检测指令至所述轨道机器人之后,还包括:
32、所述驾驶室检测模块根据所述检测指令检测待称重车辆的驾驶室;
33、当检测到待称重车辆的驾驶室时,所述轨道机器人沿所述可移动轨道运动;并当所述轨道机器人与所述待称重车辆的驾驶室保持预设距离时,将所述第二伸展探测臂打开以使所述方向盘锁定检测模块检测驾驶室内的方向盘位置;
34、所述轨道机器人将所述伸展探测臂打开以使所述车内人员检测模块探测车内是否有人员下车,具体包括:
35、所述轨道机器人当所述方向盘锁定检测模块检测到驾驶室内的方向盘位置时,将所述第一伸展探测臂打开以使所述车内人员检测模块探测车内是否有人员下车。
36、可选的,所述轨道机器人还包括:报警模块及语音播报模块;
37、所述汽车衡称量检测方法,还包括:
38、当所述车内人员检测模块探测车内无人员下车,所述报警模块发出报警信号;并通过所述语音播报模块播报人员下车动作提示信息。
39、可选的,所述汽车衡称量检测系统还包括:压边检测模块;
40、所述汽车衡称量检测方法还包括:
41、所述压边检测模块确定所述待称重车辆是否在车辆称重区域内;并将所述待称重车辆是否在车辆称重区域内的确认信息发送至所述称量模块;
42、当所述车内人员检测模块探测到车内有人员下车及所述外部监控设备未识别到称重区域内的外部移动对象,所述称量模块确定所述待称重车辆的称量数据,包括:
43、当所述车内人员检测模块探测到车内有人员下车、所述待称重车辆在车辆称重区域内、所述外部监控设备未识别到称重区域内的外部移动对象,所述称量模块确定所述待称重车辆的称量数据。
44、本发明实施例,通过外部监控设备识别待称重车辆的车辆信息及称重区域内的外部移动对象;称量模块根据车辆信息判断是否满足称量要求;若满足称量要求,控制道闸打开;并当检测到重量信号,发送检测指令至轨道机器人;轨道机器人则根据检测指令将伸展探测臂打开以使车内人员检测模块探测车内是否有人员下车;当车内人员检测模块探测到车内有人员下车及外部监控设备未识别到称重区域内的外部移动对象,称量模块确定待称重车辆的称量数据,如此由于轨道机器人可以实现通过打开伸展探测臂以使车内人员检测模块探测车内是否有人员下车,实现了在车内对人员进行检测,提高对驾驶室内人员的探测准确率,同时本方案还实现了称量检测系统的智能化设计。
- 还没有人留言评论。精彩留言会获得点赞!