一种配电网故障定位分析的行波测距改进方法与流程
本发明涉及配电网故障定位,具体地说,涉及一种配电网故障定位分析的行波测距改进方法。
背景技术:
1、电网企业是重点的国有企业,与我国的经济命脉和能源安全都密切相关,是国家发展的基础。近年来,我国各行各业对电力系统供电可靠性的要求愈来愈高。配电网络是电力系统中与用户直接关联的部分,对供电可靠性的要求比较高,然而由于线路长,设备多,配电网发生故障非常频繁。如果在配电网中出现了故障,不仅会对居民的日常生活和工厂的工业生产造成影响,甚至有可能引起重大事故。
2、传统的信号分解的方法有经验模态分解emd、集合模态经验分解eemd等。其中emd具有自适应性、多分辨率、完备性、正交性等特点,但由于缺乏严格的数学推导和严谨的理论框架支持,仅是一种经验算法,该方法仍存在包括端点效应、模态混叠等需要解决的问题。emd在分解过程中,为了得到上包络线和下包络线,会适用三次样条插值函数拟合信号的极值点。但实际情况中,信号的端点处不一定都是极值点,此时对信号两端使用三次样条插值函数进行拟合,就会产生误差并在端点处形成发散现象,导致所得的imf分量失真,降低了结果的精确度,这就是端点效应。而模态混叠是指emd由于受到噪声和脉冲信号等异常事件等影响,使得emd难以彻底完整地分离出不同频率或者特征事件尺度的信号,导致不同频率或者特征时间尺度集中在同一个imf中,或者是同一频率或者特征尺度出现在互不相关的imf分量中。模态混叠最终会造成不同频率的imf分量波形相互混叠,相互影响,无法区分和辨识。
3、集合模态经验分解eemd在执行eemd算法之前首先要确定重复分解次数m和所加入白噪声的幅值系数ξ0两个参数的值,两个参数的选择对eemd的分解性能具有直接的影响。研究表明,最终误差的标准差与添加白噪声的幅值系数成正比与根号下重复分解次数m成反比。若添加的高斯白噪声幅值系数ξ0过小时,无法弥补异常事件造成的模态混叠现象。同样,若添加的高斯白噪声幅值系数ξ0过大时,会完全淹没原始信号的特征,加噪分解失去了原有的意义。为了降低imf分量中残余噪声的影响,应增加重复分解次数,而过多地进行重复分解会增加算法的运算量。此外,若重复分解次数的值设置不合理,分解后各个imf分量会残留部分噪声,所残留的噪声会影响信号分解结果的精确度,特别是对下文所要研究的配电线路故障测距而言,残留过多的噪声会影响故障行波波头的辨识和判定,会对故障测距的精确度造成较大的误差。
4、单通道盲源分离(single channel bss,scbss),基于虚拟多通道的scbss算法。此算法常用小波分解、小波包分解、经验模态分解(empirical mode decomposition,emd)和增强经验模态分解(essential emd,eemd)与ica结合,但是小波基和分解层数选择困难、emd分解经常出现模态混叠现象等问题,这些直接影响算法的分离性能。基于变分模式分解(variational mode decomposition,vmd)的单通道盲源分离(vmd-scbss)算法需要预先知道模态数k。针对混合的源信号数未知,可以使用基于反馈vmd的通信信号scbss算法。
5、另外传统的行波测距运用到了波速与时间的乘积确定故障位置,但是波速会受到线路分布参数以及频率的影响。鉴于此,针对上述提出的信号分解问题和频率、线路分布参数对波速的影响进而影响定位精准度的问题,我们提出了一种配电网故障定位分析的行波测距改进方法。
技术实现思路
1、本发明的目的在于提供一种配电网故障定位分析的行波测距改进方法,以解决上述背景技术中提出的问题。
2、为实现上述技术问题的解决,本发明的目的在于,提供了一种配电网故障定位分析的行波测距改进方法,包括如下步骤:
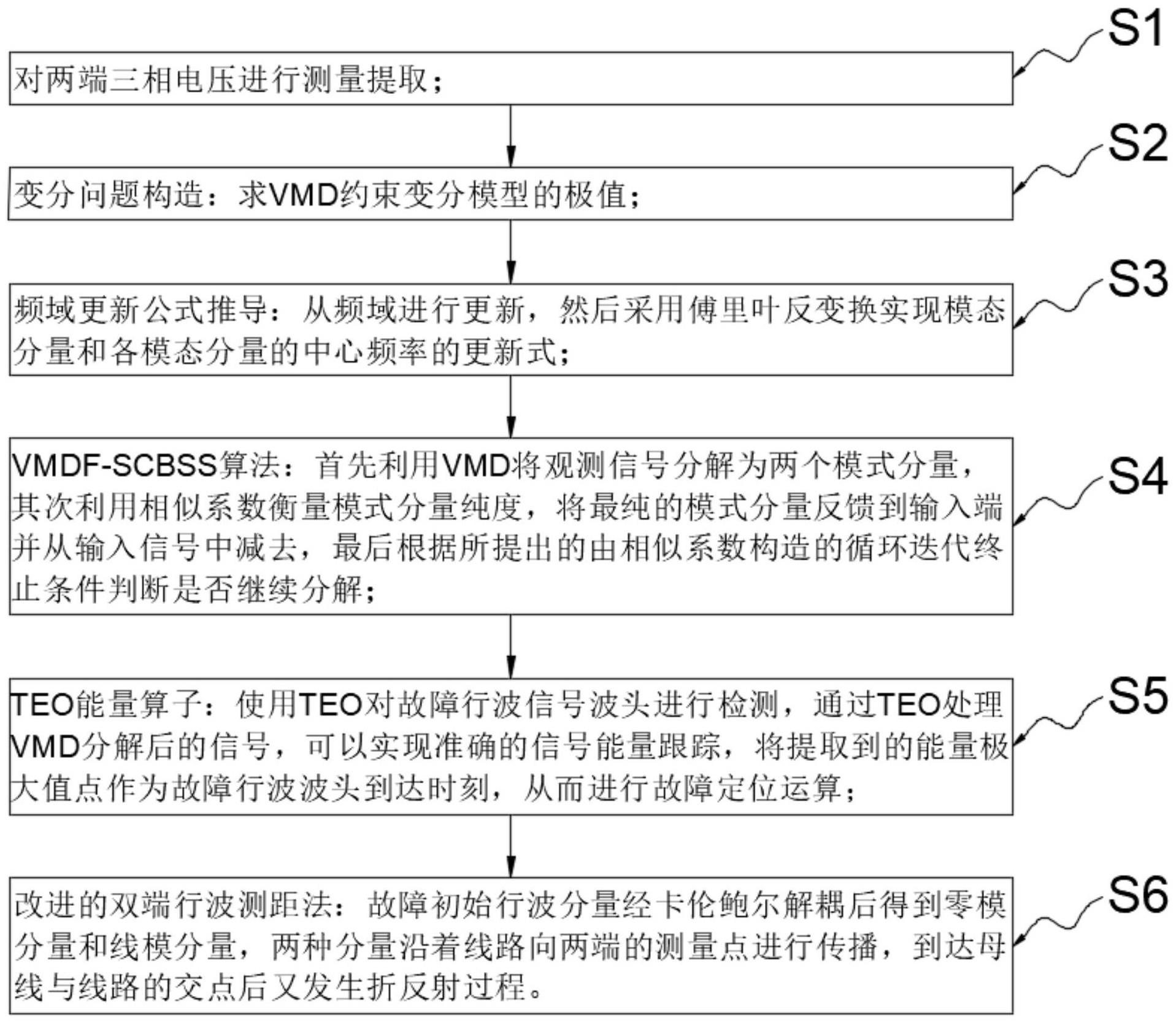
3、s1、对两端三相电压进行测量提取;
4、s2、变分问题构造:求vmd约束变分模型(即vmd的泛函)的极值;
5、s3、频域更新公式推导:从频域进行更新,然后采用傅里叶反变换实现模态分量和各模态分量的中心频率的更新式;
6、s4、vmdf-scbss算法(基于反馈的vmd-scbss算法):首先利用vmd将观测信号分解为两个模式分量,其次利用相似系数衡量模式分量纯度,将最纯的模式分量反馈到输入端并从输入信号中减去,最后根据所提出的由相似系数构造的循环迭代终止条件判断是否继续分解;
7、s5、teo能量算子:使用teo对故障行波信号波头进行检测,通过teo处理vmd分解后的信号,可以实现准确的信号能量跟踪,将提取到的能量极大值点作为故障行波波头到达时刻,从而进行故障定位运算;
8、s6、改进的双端行波测距法:故障初始行波分量经卡伦鲍尔(karrenbauer)解耦后得到零模分量和线模分量,两种分量沿着线路向两端的测量点进行传播,到达母线与线路的交点后又发生折反射过程。
9、作为本技术方案的进一步改进,所述s1中,vmd的分解过程就是变分问题的求解过程,其算法主要包括变分问题的构造和变分问题的求解;vmd的求解过程主要包含两点约束,即要求每个模态分量中心频率的带宽之和最小与所有的模态分量之和等于原始信号;
10、与内涵模态分量imf不同,在vmd算法中的有限带宽的本征模态函数的约束条件更为严格,被重新定义为调幅调频的分量模态函数,数学表达式如下:
11、uk(t)=ak(t)cos(φk(t));
12、其中,ak(t)是模态分量uk(t)的包络幅值,φk(t)是模态分量uk(t)的瞬时相位。
13、作为本技术方案的进一步改进,所述s1中,变分问题的具体分解过程和推导过程如下:
14、将信号分解成k个模态分量uk(t)(k=1,2,…,k其中t为时间),各模态分量的中心频率为ωk;
15、估计各个模式的带宽,约束变分问题可表示如下:
16、
17、上述式(1)表示的,就是求取“每个模态分量中心频率的带宽之和最小”时的模态函数uk和中心频率ωk;δ(t)表示单位脉冲信号;表示每个uk(t)的解析信号,记为ξ′(t);表示将各个模式的频谱调制到相应的基频带,记为ξ(t);为希尔伯特(hilbert)变换;
18、将约束优化问题转换成非约束优化问题,如下式(2)所示,具体过程如下:
19、利用拉格朗日(lagrange)函数将约束问题非约束化,增广拉格朗日(lagrange)函数:
20、
21、其中,α的取值保证信号重构精度,λ为拉格朗日乘数,λ(t)使约束条件保持严格性;
22、同时,求解式(2)最小值问题可采用交替方向乘性优化算法,λl+1(t)交替更新公式如下式(3)、式(4)和式(5)所示:
23、
24、
25、
26、收敛条件如下式(6)所示:
27、
28、式中,τ为带宽,ε为特定取值。
29、作为本技术方案的进一步改进,所述s3中,频域更新公式推导的具体过程包括:
30、首先,为了保证完整性,要求信号和模式都是可积,且其二阶导数是平方可积,令l1表示可积,表示二阶导数是平方可积的函数空间,则x(t)和uk(t)∈t;
31、此时,为了更新uk(t),考虑到λ2(t)不影响uk(t)的寻优,所以将式(2)和式(3)的优化问题等效转化为如下式(7)所示:
32、
33、进而,为了书写方便,这里忽略等式右边变量的上标.l和.l+1;令x(t)、ξk(t)、uk(t)和λ(t)的傅里叶变换分别为和再由ξ′(t)和ξ(t)得:
34、
35、利用帕萨瓦尔/普兰谢尔(parseval/plancherel)傅里叶等距变换,将式(7)变换到频域,此处只针对某个k值计算,故符号∑k可去除,可得:
36、
37、将式(9)第一项中的ω用ω-ωk替换并计算2-范数,可得:
38、
39、令:
40、
41、由式(11)可知,fh(ω)都是正函数;可等价于求
42、令则:
43、
44、
45、由式(12)、式(13)求得最小值为:
46、
47、式(14)中:是当前余项的维纳滤波;ωk是模式功率谱的重心;对进行傅里叶逆变换,则实部即为所求uk(t);
48、同时,与uk(t)的最小化问题处理方式相同,将中心频率更新问题转换到频域;由式(11)可知,fh(ω)的第二项不包含ωk,因此可得:
49、
50、求最小值得:
51、
52、此中心频率是在模式中观察到的瞬时相位的最小二乘线性回归的频率;
53、综上所述,λl+1(t)的更新公式如下式(17)、式(18)和式(19)所示:
54、
55、
56、
57、式中,τ为带宽。
58、作为本技术方案的进一步改进,所述s4中,vmdf-scbss算法中,反馈vmd就是将每次分解得到的最纯的模式分量反馈到vmd的输入端,并在vmd的输入端减去这个模式分量,将剩余的信号作为新的信号继续进行二模式的vmd,重复这个过程,直到混合信号分解完全;具体计算式为:
59、令第kn次分解得到的模式分量为和与观测信号x(t)的相似系数分别为的计算如下式(20)所示:
60、
61、根据式(21)求i,则最纯模式分量为
62、
63、分解完全的条件是:
64、
65、式中,n为迭代次数。
66、作为本技术方案的进一步改进,所述s4中,vmdf-scbss算法的主要步骤如下:
67、s4.1、模式数目k=2,初始化迭代次数kn=1,
68、s4.2、初始化根据式(17)、式(18)和式(19)迭代,对信号进行vmd,并根据式(6)判断是否满足收敛条件,若满足则停止迭代,可得到两个模式分量和反之,继续迭代直到满足收敛条件为止;
69、s4.3、利用式(20)计算相似系数利用式(21)得到分解最纯模式分量(i取1或2);
70、s4.4、当式(22)成立时,停止反馈和分解,源信号个数等于kn+1;否则转s4.5;
71、s4.5、将s4.3选取的模式分量反馈到vmd的输入端,并从输入信号中减去该模式分量,即作为新的vmd输入,令kn=kn+1,重复s4.2-s4.4的过程。
72、根据上述算法不仅能够实现单通道的盲源分离,而且可以确定源信号数目为kn+1。
73、作为本技术方案的进一步改进,所述s5中,teo能量算子的计算方法如下:
74、其一,teo处理连续信号x(t)的计算式为:
75、ψ[x(t)]=x′2(t)-x(t)x″(t);
76、上式中,x′(t)、x″(t)分别为信号x(t)的一阶与二阶导数;
77、其二,teo处理离散信号x(n)的计算式为:
78、ψ[x(n)]=x2(n)-x(n+1)x(n-1);
79、ψ[x(t)]、ψ[x(n)]均为teo函数。
80、作为本技术方案的进一步改进,所述s6中,改进的双端行波测距法具体包括:
81、设零模行波分量的传输速度为v0,线模行波分量的传输速度为v1,根据故障行波产生的零线模分量向线路两端传输的特性,并结合传统双端行波测距法可以得到故障位置f到线路首端m的故障距离:
82、
83、根据故障线模行波分量和故障零模行波分量在线路上的传输过程可以得到:
84、
85、消去v0、v1和t0可得:
86、
87、其中,tm1表示线模分量到达m侧的时间,tn1表示线模分量到达n侧的时间;tm0表示零模分量到达m侧的时间,tn0表示零模分量到达n侧的时间;l表示线路mn的长度;t0表示故障发生时刻。
88、改进的双端行波测距法无需确定波速的具体值,仅需要测量装置获得故障行波零线模分量到达线路m、n侧的时刻即可求出故障距离。
89、与现有技术相比,本发明的有益效果:
90、1.该配电网故障定位分析的行波测距改进方法中,解决了针对源信号数目未知时,变分模式分解(vmd)算法分离单通道混合信号的性能受人为设定的模式分量中心频率间隔δf影响大、复杂度高的问题;
91、2.该配电网故障定位分析的行波测距改进方法中,解决了非线性多分量的信号分解成单分量的信号后,信号的解调和故障初始行波进行波头识别的问题;
92、3.该配电网故障定位分析的行波测距改进方法中,解决了针对传统单端行波测距中波速对定位精准度的影响问题;
93、4.该配电网故障定位分析的行波测距改进方法中,将vmdf-scbss算法、teo能量算子及改进的双端行波测距法融合,最大程度地缩小了配电故障定位的估测误差,为维修人员精准定位提供了方便。
- 还没有人留言评论。精彩留言会获得点赞!