一种编码器光栅偏心自动调整系统的制作方法
1.本发明属于编码器光栅偏心自动调整技术领域,尤其涉及一种编码器光栅偏心自动调整系统。
背景技术:
2.编码器光栅偏心需要进行偏心调整,现有技术存在的问题是:编码器光栅在调整过程中多为手动调整,手动调整精度低,同时操作速度慢,并不能达到自动调整的作用,因此需要一种能够自动对编码器光栅进行调整的系统,来满足使用者的使用。
技术实现要素:
3.针对现有技术存在的问题,本发明提供了一种编码器光栅偏心自动调整系统,具备自动调整的优点,解决了现有编码器光栅在调整过程中多为手动调整,手动调整精度低,同时操作速度慢,并不能达到自动调整的问题。
4.本发明是这样实现的,一种编码器光栅偏心自动调整系统,所述自动调整系统包括隔振底座、调整机构、支架和工控机,所述隔振底座的顶部与支架的底部固定连接,所述支架的前侧设置有编码器夹具,所述编码器夹具的底部与隔振底座的顶部固定连接,所述编码器夹具的内部设置有编码器,所述编码器的顶部设置有码盘,所述支架前侧的顶部固定连接有小视场相机,所述小视场相机的左下角固定连接有大视场相机,所述调整机构位于支架左前方。
5.作为本发明优选的,所述调整机构由超精密电动滑台和推杆组成,所述超精密电动滑台的底部与隔振底座的顶部固定连接,所述推杆位于超精密电动滑台的顶部,所述推杆的右侧与码盘的左侧配合使用。
6.作为本发明优选的,所述编码器夹具由三爪夹盘、驱动电机、编码器轴、编码器传动轴组成,所述三爪夹盘位于驱动电机的顶部,所述驱动电机的底部与隔振底座的顶部固定连接,所述驱动电机的输出端与编码器轴的底部连接,所述编码器传动轴的底部连接在柔性连接器的顶部上。
7.作为本发明优选的,所述隔振底座用于安装其它机构和降低环境振动对调整装置的影响;所述超精密电动滑台用于驱动推杆以调整码盘的圆心位置;所述三爪夹盘用于实现编码器的安装定位;所述驱动电机用于实现码盘的旋转;所述工控机用于连接这些装置实现数据处理和系统控制。
8.作为本发明优选的,所述超精密电动滑台均通过运动控制器与控制计算机通过usb口相连,并由运动控制器实现直线运动过程中的自动升降速和匀速运动控制,所述驱动电机选用伺服电机。
9.作为本发明优选的,所述大视场相机用于采集静态图像,选用行曝光的cmos单色相机,分辨率1400万像素;所述小视场相机在码盘转动时采集图像,选用帧曝光的ccd单色相机,分辨率200万像素以上,相机接口选用gige。
10.作为本发明优选的,所述码盘外径33.5mm,基圆直径26.7mm,大视场相机和小视场相机的光轴中心与码盘中心在一条直线上,大视场相机的视场中包括码盘表面的一部分和推杆头部。
11.作为本发明优选的,所述自动调整系统还包括测量调整过程,所述测量调整过程包括如下步骤:步骤一:将编码器安装固定在驱动轴及三爪夹盘上;步骤二:程序控制大视场相机采集图像,测量码盘初始偏心,其精度高于0.1mm,如果码盘初始偏心大于0.5mm,则启动驱动电机转动码盘的最高点至推杆处,控制推杆前移进行调整并确认码盘初始偏心在0.5mm之内;步骤三:程序自动控制码盘旋转,同时开始采样,旋转一圈采样60个点,据此可以计算出码盘中心cg和旋转中心c0的位置;步骤四:程序控制码盘缓慢减速,并停止到调整装置推杆中心ca、码盘中心cg和旋转中心c0处于一条直线,并且cg处在ca和c0之间的位置处;步骤五:程序控制大视场相机采集图像,测量推杆前端面距码盘最高点的距离,并自动控制推杆快速移动到距码盘最高点20um以内并且不接触码盘的位置上,滑台移动速度不高于6mm/s,之后,以低于0.3mm/s的速度移动推杆,用小视场相机进行位置反馈,其测量周期20ms,在距目标位置6um时再次降低速度到为30um/s,直到将cg和c0调整到一个点上;步骤六:重复步骤3,重新测量码盘偏心量,若偏心量仍超出指定偏差,则重复步骤4和步骤5,直到码盘偏心量满足要求为止;步骤七:推杆退回到待命位置,卸下编码器。
12.与现有技术相比,本发明的有益效果如下:1、本发明通过设置隔振底座、支架、码盘、编码器、小视场相机、大视场相机、超精密电动滑台、推杆、三爪夹盘和驱动电机的配合使用,解决了现有编码器光栅在调整过程中多为手动调整,手动调整精度低,同时操作速度慢,并不能达到自动调整的问题。
13.2、本发明通过设置调整机构,能够方便推动码盘进行移动,对码盘进行定位。
14.3、本发明通过设置编码器夹具,避免将驱动电机安装误差和编码器安装误差传递到编码器轴上,从而影响测量结果。
15.4、本发明运动控制器与控制计算机通过usb口相连和伺服电机,能够方便信号的传输,伺服电机能够提高移动的精准度。
16.5、本发明通过设置大视场相机和小视场相机,能够方便图像的采集,方便位置的比对。
17.6、本发明通过设置码盘,以便使用大视场相机检测初始偏心度以及推杆头部与码盘边缘的距离;小视场相机的视场需包括基圆的一小部分,大视场相机和小视场相机的视场中心安排在基圆同一条径向线的两侧是为了有较大的空间以便于安装相机及镜头。
附图说明
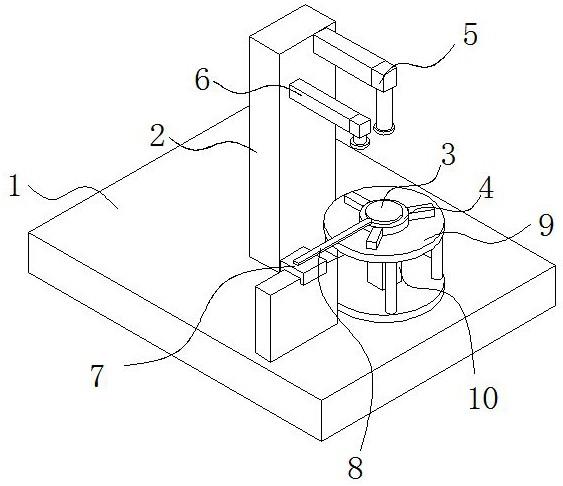
18.图1是本发明实施例提供的光栅自动调整系统结构示意图;图2是本发明实施例提供小视场相机视场和大视场相机视场的位置关系图;图3是本发明实施例提供小视场相机及镜头和大视场相机及镜头的位置关系图;图4是本发明实施例提供小视场相机光源和大视场相机光源位置图;
图5是本发明实施例提供相机光路图;图6是本发明实施例提供编码器夹具结构图;图7是本发明实施例提供偏心测量原理图;图8是本发明实施例提供回转中心测量原理图;图9是本发明实施例提供调整流程图。
19.图中:1、隔振底座;2、支架;3、码盘;4、编码器;5、小视场相机;6、大视场相机;7、超精密电动滑台;8、推杆;9、三爪夹盘;10、驱动电机;11、小视场相机视场;12、大视场相机视场;13、基圆;14、小视场相机及镜头;15、大视场相机及镜头;16、小视场相机光源;17、大视场相机光源;18、图像传感器;19、镜头;20、编码器轴;21、编码器传动轴;22、编码器轴。
具体实施方式
20.为能进一步了解本发明的本发明内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下。
21.下面结合附图对本发明的结构作详细的描述。
22.如图1至图9所示,本发明实施例提供的一种编码器光栅偏心自动调整系统,自动调整系统包括隔振底座1、调整机构、支架2和工控机,隔振底座1的顶部与支架2的底部固定连接,支架2的前侧设置有编码器夹具,编码器夹具的底部与隔振底座1的顶部固定连接,编码器夹具的内部设置有编码器4,编码器4的顶部设置有码盘3,支架2前侧的顶部固定连接有小视场相机5,小视场相机5的左下角固定连接有大视场相机6,调整机构位于支架2左前方。
23.调整机构由超精密电动滑台7和推杆8组成,超精密电动滑台7的底部与隔振底座1的顶部固定连接,推杆8位于超精密电动滑台7的顶部,推杆8的右侧与码盘3的左侧配合使用,超精密电动滑台7位移分辨率0.3um。
24.采用上述方案:通过设置调整机构,能够方便推动码盘3进行移动,对码盘3进行定位。
25.编码器夹具由三爪夹盘9、驱动电机10、编码器轴22、编码器4传动轴组成,三爪夹盘9位于驱动电机10的顶部,驱动电机10的底部与隔振底座1的顶部固定连接,驱动电机10的输出端与编码器轴22的底部连接,编码器4传动轴的底部连接在柔性连接器的顶部上。
26.采用上述方案:通过设置编码器夹具,避免将驱动电机10安装误差和编码器4安装误差传递到编码器轴20上,从而影响测量结果。
27.隔振底座1用于安装其它机构和降低环境振动对调整装置的影响;超精密电动滑台7用于驱动推杆8以调整码盘3的圆心位置;三爪夹盘9用于实现编码器4的安装定位;驱动电机10用于实现码盘3的旋转;工控机用于连接这些装置实现数据处理和系统控制。
28.超精密电动滑台7均通过运动控制器与控制计算机通过usb口相连,并由运动控制器实现直线运动过程中的自动升降速和匀速运动控制,驱动电机10选用伺服电机。
29.采用上述方案:运动控制器与控制计算机通过usb口相连和伺服电机,能够方便信号的传输,伺服电机能够提高移动的精准度。
30.大视场相机6用于采集静态图像,选用行曝光的cmos单色相机,分辨率1400万像素;小视场相机5在码盘3转动时采集图像,选用帧曝光的ccd单色相机,分辨率200万像素以
上,相机接口选用gige。
31.采用上述方案:通过设置大视场相机6和小视场相机5,能够方便图像的采集,方便位置的比对。
32.码盘3外径33.5mm,基圆13直径26.7mm,大视场相机6和小视场相机5的光轴中心与码盘3中心在一条直线上,大视场相机6的视场中包括码盘3表面的一部分和推杆8头部。
33.采用上述方案:图2为相机视场、推杆与码盘位置关系图,大视场相机和小视场相机的光轴中心与码盘中心大致在一条直线上,大视场相机的视场中包括大码盘表面的一部分和推杆头部,以便使用大视场相机检测码盘种类、初始偏心度、以及推杆头部与码盘边缘的距离;小视场相机的视场需包括基圆的一小部分,由于不同尺寸的码盘的基圆的尺寸位置不同,所以,小相机的视场需能够自动调整。大小相机的视场中心安排在基圆同一条径向线的两侧是为了有较大的空间以便于安装相机及镜头。
34.图3为大小视场相机及镜头与码盘位置关系图,从图中可以看出,即使是调整小码盘时,相关视觉装置也可以放得下,光源安装在两台相机的镜头外侧,如图4所示,小视场相机的光源的安装位置低于大视场相机的光源的位置。
35.图5中,f为相机镜头的焦距,w为图像传感器18一个方向上的尺寸,h为物距,v为视场在一个方向上的宽度。
36.这几个参数之间的关系为:f / w = h / v ;对于大视场相机6,其视场宽度大约v=60mm,假设图像传感器18尺寸为6.5mm*4.6mm,取w=6.5mm,若镜头焦距f=12mm,则物距h≈111mm;小视场相机5使用显微镜头,镜头前端与被摄物之间的距离约为100mm;如图6所示,编码器夹具由三爪夹盘、驱动电机、柔性联轴器、编码器传动轴组成,驱动电机和编码器传动轴之间由柔性联轴器联结起来,避免将电机安装误差和编码器安装误差传递到编码器轴上,从而影响测量结果。
37.若忽略编码器轴、轴承与轴承孔之间的间隙,则编码器轴转动时的中心就是其轴心,通过调整要将码盘的中心调整到与编码器轴的中心一致。
38.在每一次测量中,测量基准均为相机坐标系的原点,如图7所示,编码器4码盘3绕回转中心转动,在每一个测量位置(图中给出了8个测量位置,实际可更多)上,小视场相机5采样可得到一段基圆13圆弧,据此即可计算出码盘3此时的圆心坐标ci (i=1-8),在多个测量位置上得到的圆心可构成一个以回转中心为圆心,半径为偏心量的圆,从而可以计算出偏心量和最高点位置,如图8所示,图中:c1为回转中心45度圆心坐标,c2为回转中心90度圆心坐标,c3为回转中心135度圆心坐标,c4为回转中心180度圆心坐标,c5为回转中心225度圆心坐标,c6为回转中心270度圆心坐标,c7为回转中心315度圆心坐标,c8为回转中心360度圆心坐标。
39.采用亚像素计算方法,上述测量精度可高于小视场相机5的分辩率0.6um;若忽略编码器4轴、轴承与轴承孔之间的间隙,则编码器4轴转动时的中心就是其轴心,通过调整要将码盘3的中心调整到与编码器4轴的中心一致。
40.自动调整系统还包括测量调整过程,测量调整过程包括如下步骤:步骤一:将编码器4安装固定在驱动轴及三爪夹盘9上;步骤二:程序控制大视场相机6采集图像,测量码盘3初始偏心(精度高于0.1mm),
如果码盘3初始偏心大于0.5mm,则启动驱动电机10转动码盘3的最高点至推杆8处,控制推杆8前移进行调整并确认码盘3初始偏心在0.5mm之内;步骤三:程序自动控制码盘3旋转,同时开始采样,旋转一圈采样60个点,据此可以计算出码盘3中心cg和旋转中心c0的位置;步骤四:程序控制码盘3缓慢减速,并停止到调整装置推杆8中心ca、码盘3中心cg和旋转中心c0处于一条直线,并且cg处在ca和c0之间的位置处;步骤五:程序控制大视场相机6采集图像,测量推杆8前端面距码盘3最高点的距离,并自动控制推杆8快速移动到距码盘3最高点20um以内并且不接触码盘3的位置上,滑台移动速度不高于6mm/s,之后,以低于0.3mm/s的速度移动推杆8,用小视场相机5进行位置反馈(测量周期约20ms),在距目标位置6um时再次降低速度到30um/s,直到将cg和c0调整到一个点上;步骤六:重复步骤3,重新测量码盘3偏心量,若偏心量仍超出指定偏差,则重复步骤4和步骤5,直到码盘3偏心量满足要求为止;步骤七:推杆8退回到待命位置,卸下编码器4。
41.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1