一种三维轮廓仪、三维轮廓建立方法、装置和电子设备与流程
本技术涉及视觉检测,特别是涉及一种三维轮廓仪、三维轮廓建立方法、装置和电子设备。
背景技术:
1、在工业生产检测中,越来越多的检测需要3d(three dimensions,三维)数据,包括测量的需求,不仅需要长宽等x/y方向的数据,也要求测量z向的高度。目前应用于工业测量检测领域的技术,主要是以激光三角法、结构光相位计算和双目立体标定的方式计算三维数据,其中使用三角法的线激光3d相机,扫描速度不高,且x/y向精度不高,单线点数基本在3k左右;结构光投影技术通常需要投射多张图像,物体基本是需要静止状态拍摄,因此效率不高,其使用的投影装置分辨率也不高,因此大视野投影下精度非常受限;双目立体视觉通常是使用面阵相机分别进行标定,其拍摄方式和2d面阵相机使用方式一样,也主要适用于方正的物体拍摄,同样用于拍摄静止物体。
2、相关的线激光3d相机如图1所示,主体光学结构由1个激光发射器和1个面阵工业相机组成,在相机发生位移后,会存在一定的视野盲区。
技术实现思路
1、本技术实施例的目的在于提供一种三维轮廓仪、三维轮廓建立方法、装置和电子设备,以减少视野盲区。具体技术方案如下:
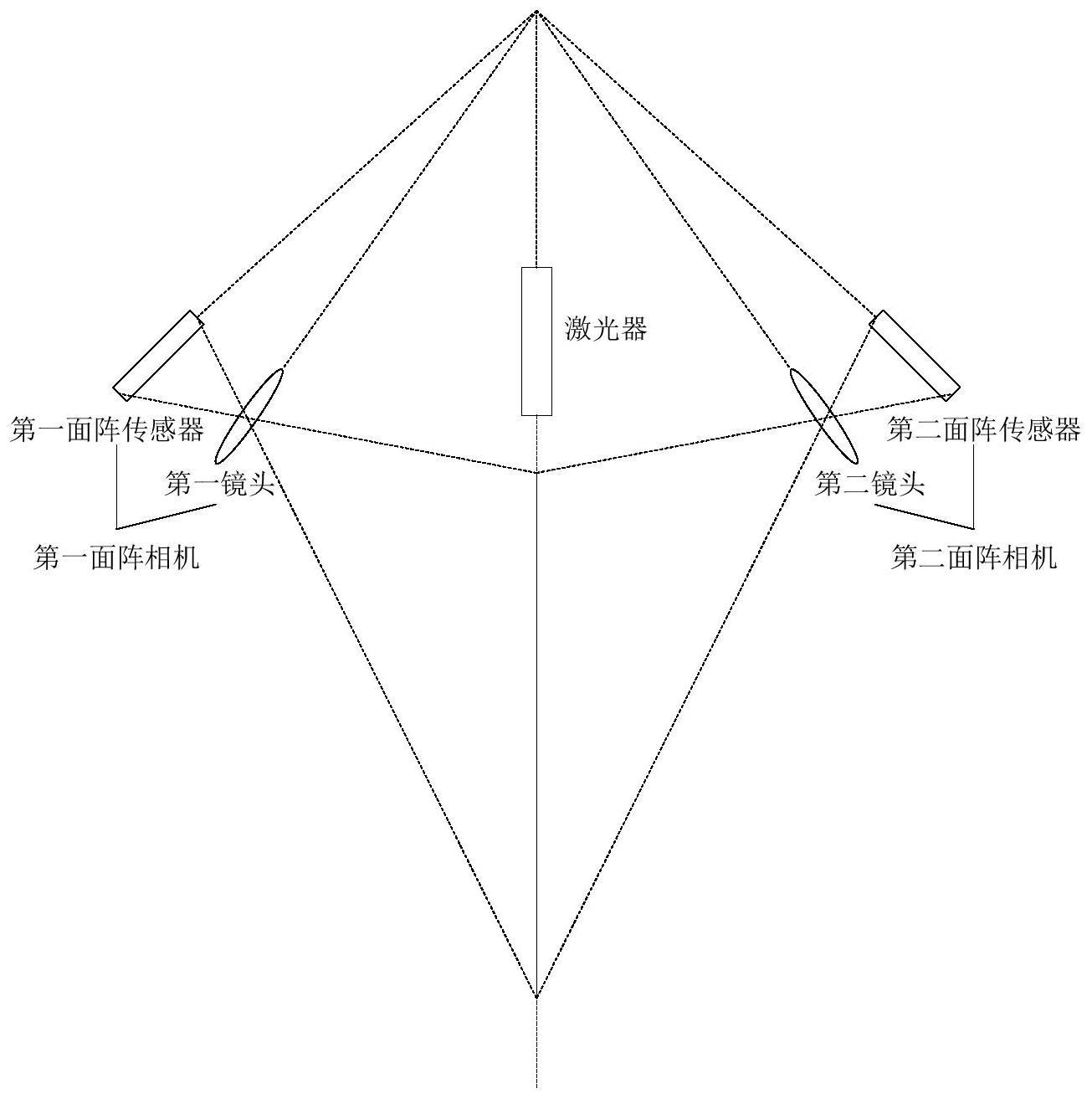
2、根据本技术实施例的第一方面,提供一种三维轮廓仪,包括:第一面阵相机、第二面阵相机、激光器、处理器;所述第一面阵相机包括第一面阵传感器及第一镜头,所述第二面阵相机包括第二面阵传感器及第二镜头;
3、所述激光器设置于所述第一面阵相机与所述第二面阵相机之间;所述第一镜头的镜头平面、所述第一面阵传感器的成像平面、所述第二镜头的镜头平面、所述第二面阵传感器的成像平面、所述激光器的激光平面相交于同一直线;
4、所述激光器用于发射激光;
5、所述第一面阵相机用于采集待测量物体的第一激光灰度图像;所述第二面阵相机用于采集所述待测量物体的第二激光灰度图像;
6、所述处理器用于结合所述第一激光灰度图像及所述第二激光灰度图像,确定所述待测量物体的三维轮廓。
7、可选的,所述激光器为线激光器,所述线激光器用于发射线激光。
8、可选的,所述处理器具体用于:将所述第一激光灰度图像及所述第二激光灰度图像转换到同一相机坐标系下,并对同一相机坐标系下的第一激光灰度图像及第二激光灰度图像进行融合得到第一融合图像;对所述第一融合图像进行激光条纹中心点的检测,得到所述激光条纹中心点的第一相机坐标;将所述激光条纹中心点的第一相机坐标转换到三维空间坐标系中,得到所述激光条纹中心点的第一三维点云坐标;根据所述激光条纹中心点的第一三维点云坐标,确定所述待测量物体的三维轮廓。
9、可选的,所述处理器具体用于:对所述第一激光灰度图像进行激光条纹中心点的检测得到第一中心点区域,对所述第二激光灰度图像进行激光条纹中心点的检测得到第二中心点区域;将所述第一中心点区域及所述第二中心点区域转换到同一相机坐标系下;对同一相机坐标系下的第一中心点区域及第二中心点区域进行融合,得到中心点融合区域;获取所述中心点融合区域在所述同一相机坐标系下的第二相机坐标,并将所述第二相机坐标转换到三维空间坐标系中,得到第二三维点云坐标;根据所述第二三维点云坐标,确定所述待测量物体的三维轮廓。
10、可选的,所述处理器具体用于:按照同一相机坐标系下的第一中心点区域及第二中心点区域中各中心点像素列的位置,建立第一中心点区域中的中心点像素列与第二中心点区域中的中心点像素列的对应关系;针对任意具备对应关系的两列中心点像素列,计算该两列中心点像素列之间的差异度;若所述差异度小于预设差异度阈值,采用均值融合的方式对该两列中心点像素列进行融合,得到该两列中心点像素列的像素融合列;若所述差异度不小于预设差异度阈值,分别确定该两列中心点像素列中各中心点像素列的可信度,在该两列中心点像素列中选取可信度最高的中心点像素列作为该两列中心点像素列的像素融合列;其中,所述中心点融合区域包括各像素融合列。
11、可选的,所述处理器具体用于:对所述第一激光灰度图像进行激光条纹中心点的检测得到第一中心点区域;对所述第二激光灰度图像进行激光条纹中心点的检测得到第二中心点区域;获取所述第一中心点区域在所述第一激光灰度图像的相机坐标系中的第三相机坐标,将所述第三相机坐标转换到三维空间坐标系中,得到第三三维点云坐标;获取所述第二中心点区域在所述第二激光灰度图像的相机坐标系中的第四相机坐标,将所述第四相机坐标转换到所述三维空间坐标系中,得到第四三维点云坐标;根据所述第三三维点云坐标及所述第四三维点云坐标进行点云融合,得到融合三维点云坐标;根据所述融合三维点云坐标,确定所述待测量物体的三维轮廓。
12、可选的,所述处理器具体用于:获取所述第三三维点云坐标表示的各中心点与所述第四三维点云坐标表示的各中心点的对应关系;针对任意具备对应关系的两个中心点,根据所述第三三维点云坐标及所述第四三维点云坐标,计算该两个中心点之间的距离;若所述距离小于预设距离阈值,采用均值融合的方式对该两个中心点进行融合,得到该两个中心点的融合中心点;若所述距离不小于预设距离阈值,分别确定该两个中心点中各中心的可信度,在该两个中心点中选取可信度最高的中心点作为该两个中心点的融合中心点;其中,所述融合三维点云坐标包括各融合中心点的三维点云坐标。
13、根据本技术实施例的第二方面,提供一种三维轮廓建立方法,应用于上述第一方面任一所述的三维轮廓仪,所述方法包括:
14、获取由第一面阵相机采集的待测量物体的第一激光灰度图像及由第二面阵相机采集的所述待测量物体的第二激光灰度图像;
15、结合所述第一激光灰度图像及所述第二激光灰度图像,确定所述待测量物体的三维轮廓。
16、可选的,所述结合所述第一激光灰度图像及所述第二激光灰度图像,确定所述待测量物体的三维轮廓,包括:
17、将所述第一激光灰度图像及所述第二激光灰度图像转换到同一相机坐标系下,并对同一相机坐标系下的第一激光灰度图像及第二激光灰度图像进行融合得到第一融合图像;
18、对所述第一融合图像进行激光条纹中心点的检测,得到所述激光条纹中心点的第一相机坐标;
19、将所述激光条纹中心点的第一相机坐标转换到三维空间坐标系中,得到所述激光条纹中心点的第一三维点云坐标;
20、根据所述激光条纹中心点的第一三维点云坐标,确定所述待测量物体的三维轮廓。
21、可选的,所述结合所述第一激光灰度图像及所述第二激光灰度图像,确定所述待测量物体的三维轮廓,包括:
22、对所述第一激光灰度图像进行激光条纹中心点的检测得到第一中心点区域,对所述第二激光灰度图像进行激光条纹中心点的检测得到第二中心点区域;
23、将所述第一中心点区域及所述第二中心点区域转换到同一相机坐标系下;对同一相机坐标系下的第一中心点区域及第二中心点区域进行融合,得到中心点融合区域;
24、获取所述中心点融合区域在所述同一相机坐标系下的第二相机坐标,并将所述第二相机坐标转换到三维空间坐标系中,得到第二三维点云坐标;
25、根据所述第二三维点云坐标,确定所述待测量物体的三维轮廓。
26、可选的,所述对同一相机坐标系下的第一中心点区域及第二中心点区域进行融合,得到中心点融合区域,包括:
27、按照同一相机坐标系下的第一中心点区域及第二中心点区域中各中心点像素列的位置,建立第一中心点区域中的中心点像素列与第二中心点区域中的中心点像素列的对应关系;
28、针对任意具备对应关系的两列中心点像素列,计算该两列中心点像素列之间的差异度;
29、若所述差异度小于预设差异度阈值,采用均值融合的方式对该两列中心点像素列进行融合,得到该两列中心点像素列的像素融合列;
30、若所述差异度不小于预设差异度阈值,分别确定该两列中心点像素列中各中心点像素列的可信度,在该两列中心点像素列中选取可信度最高的中心点像素列作为该两列中心点像素列的像素融合列;
31、其中,所述中心点融合区域包括各像素融合列。
32、可选的,所述结合所述第一激光灰度图像及所述第二激光灰度图像,确定所述待测量物体的三维轮廓,包括:
33、对所述第一激光灰度图像进行激光条纹中心点的检测得到第一中心点区域;对所述第二激光灰度图像进行激光条纹中心点的检测得到第二中心点区域;
34、获取所述第一中心点区域在所述第一激光灰度图像的相机坐标系中的第三相机坐标,将所述第三相机坐标转换到三维空间坐标系中,得到第三三维点云坐标;获取所述第二中心点区域在所述第二激光灰度图像的相机坐标系中的第四相机坐标,将所述第四相机坐标转换到所述三维空间坐标系中,得到第四三维点云坐标;
35、根据所述第三三维点云坐标及所述第四三维点云坐标进行点云融合,得到融合三维点云坐标;
36、根据所述融合三维点云坐标,确定所述待测量物体的三维轮廓。
37、可选的,所述根据所述第三三维点云坐标及所述第四三维点云坐标进行点云融合,得到融合三维点云坐标,包括:
38、获取所述第三三维点云坐标表示的各中心点与所述第四三维点云坐标表示的各中心点的对应关系;
39、针对任意具备对应关系的两个中心点,根据所述第三三维点云坐标及所述第四三维点云坐标,计算该两个中心点之间的距离;
40、若所述距离小于预设距离阈值,采用均值融合的方式对该两个中心点进行融合,得到该两个中心点的融合中心点;
41、若所述距离不小于预设距离阈值,分别确定该两个中心点中各中心的可信度,在该两个中心点中选取可信度最高的中心点作为该两个中心点的融合中心点;
42、其中,所述融合三维点云坐标包括各融合中心点的三维点云坐标。
43、根据本技术实施例的第三方面,提供一种三维轮廓建立装置,应用于上述第一方面任一所述的三维轮廓仪,所述装置包括:
44、激光灰度图像获取模块,用于获取由第一面阵相机采集的待测量物体的第一激光灰度图像及由第二面阵相机采集的所述待测量物体的第二激光灰度图像;
45、三维轮廓确定模块,用于结合所述第一激光灰度图像及所述第二激光灰度图像,确定所述待测量物体的三维轮廓。
46、可选的,所述三维轮廓确定模块,包括:
47、图像融合子模块,用于将所述第一激光灰度图像及所述第二激光灰度图像转换到同一相机坐标系下,并对同一相机坐标系下的第一激光灰度图像及第二激光灰度图像进行融合得到第一融合图像;
48、第一相机坐标获取子模块,用于对所述第一融合图像进行激光条纹中心点的检测,得到所述激光条纹中心点的第一相机坐标;
49、第一三维点云坐标获取子模块,用于将所述激光条纹中心点的第一相机坐标转换到三维空间坐标系中,得到所述激光条纹中心点的第一三维点云坐标;
50、第一三维轮廓获取子模块,用于根据所述激光条纹中心点的第一三维点云坐标,确定所述待测量物体的三维轮廓。
51、可选的,所述三维轮廓确定模块,包括:
52、第一中心点区域获取子模块,用于对所述第一激光灰度图像进行激光条纹中心点的检测得到第一中心点区域,对所述第二激光灰度图像进行激光条纹中心点的检测得到第二中心点区域;
53、中心点融合区域获取子模块,用于将所述第一中心点区域及所述第二中心点区域转换到同一相机坐标系下;对同一相机坐标系下的第一中心点区域及第二中心点区域进行融合,得到中心点融合区域;
54、第二三维点云坐标获取子模块,用于获取所述中心点融合区域在所述同一相机坐标系下的第二相机坐标,并将所述第二相机坐标转换到三维空间坐标系中,得到第二三维点云坐标;
55、第二三维轮廓获取子模块,用于根据所述第二三维点云坐标,确定所述待测量物体的三维轮廓。
56、可选的,所述中心点融合区域获取子模块,包括:
57、像素列对应关系获取单元,用于按照同一相机坐标系下的第一中心点区域及第二中心点区域中各中心点像素列的位置,建立第一中心点区域中的中心点像素列与第二中心点区域中的中心点像素列的对应关系;
58、差异度计算单元,用于针对任意具备对应关系的两列中心点像素列,计算该两列中心点像素列之间的差异度;
59、差异度判断单元,用于若所述差异度小于预设差异度阈值,采用均值融合的方式对该两列中心点像素列进行融合,得到该两列中心点像素列的像素融合列;若所述差异度不小于预设差异度阈值,分别确定该两列中心点像素列中各中心点像素列的可信度,在该两列中心点像素列中选取可信度最高的中心点像素列作为该两列中心点像素列的像素融合列;其中,所述中心点融合区域包括各像素融合列。
60、可选的,所述三维轮廓确定模块,包括:
61、第二中心点区域获取子模块,用于对所述第一激光灰度图像进行激光条纹中心点的检测得到第一中心点区域;对所述第二激光灰度图像进行激光条纹中心点的检测得到第二中心点区域;
62、第三三维点云坐标与第四三维点云坐标获取子模块,用于获取所述第一中心点区域在所述第一激光灰度图像的相机坐标系中的第三相机坐标,将所述第三相机坐标转换到三维空间坐标系中,得到第三三维点云坐标;获取所述第二中心点区域在所述第二激光灰度图像的相机坐标系中的第四相机坐标,将所述第四相机坐标转换到所述三维空间坐标系中,得到第四三维点云坐标;
63、融合三维点云坐标获取子模块,用于根据所述第三三维点云坐标及所述第四三维点云坐标进行点云融合,得到融合三维点云坐标;
64、第三三维轮廓获取子模块,用于根据所述融合三维点云坐标,确定所述待测量物体的三维轮廓。
65、可选的,所述融合三维点云坐标获取子模块,包括:
66、中心点对应关系获取单元,用于获取所述第三三维点云坐标表示的各中心点与所述第四三维点云坐标表示的各中心点的对应关系;
67、距离计算单元,用于针对任意具备对应关系的两个中心点,根据所述第三三维点云坐标及所述第四三维点云坐标,计算该两个中心点之间的距离;
68、距离判断单元,用于若所述距离小于预设距离阈值,采用均值融合的方式对该两个中心点进行融合,得到该两个中心点的融合中心点;若所述距离不小于预设距离阈值,分别确定该两个中心点中各中心的可信度,在该两个中心点中选取可信度最高的中心点作为该两个中心点的融合中心点;其中,所述融合三维点云坐标包括各融合中心点的三维点云坐标。
69、根据本技术实施例的第四方面,提供一种电子设备,包括:
70、存储器,用于存放计算机程序;
71、处理器,用于执行存储器上所存放的程序时,实现上述任一所述的三维轮廓建立方法。
72、根据本技术实施例的第五方面,提供一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述任一所述的三维轮廓建立方法。
73、本技术实施例还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述任一所述的三维轮廓建立方法。
74、本技术实施例有益效果:
75、本技术实施例提供的一种三维轮廓仪、三维轮廓建立方法、装置和电子设备,所述三维轮廓仪,包括:第一面阵相机、第二面阵相机、激光器、处理器;所述第一面阵相机包括第一面阵传感器及第一镜头,所述第二面阵相机包括第二面阵传感器及第二镜头;所述激光器设置于所述第一面阵相机与所述第二面阵相机之间;所述第一镜头的镜头平面、所述第一面阵传感器的成像平面、所述第二镜头的镜头平面、所述第二面阵传感器的成像平面、所述激光器的激光平面相交于同一直线;所述激光器用于发射激光;所述第一面阵相机用于采集待测量物体的第一激光灰度图像;所述第二面阵相机用于采集所述待测量物体的第二激光灰度图像;所述处理器用于结合所述第一激光灰度图像及所述第二激光灰度图像,确定所述待测量物体的三维轮廓。利用两个面阵相机分别从两个角度进行图像拍摄,可以减少视野盲区。
76、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!