基于区域自适应的浅海水深遥感反演方法与流程
本发明属于遥感,尤其是涉及基于区域自适应的浅海水深遥感反演方法。
背景技术:
1、浅海是海陆相互作用最为频繁的区域,也是围海造地、港口建设、海水养殖、海上交通等工程开发活动最为重要的区域,开展浅海水深测量工作,准确掌握浅海水深信息和海底地形地貌,对于国家海上交通安全、海岸带综合管理和军事国防等都具有重要的意义。传统的水深测量方法采用船载探测设备进行,但在浅海区域和敏感海域无法开展作业,造成近岸浅海区域存在大量的水深实测空白区。而遥感探测技术具有大面积、更新快、非直接接触等优点,可以作为传统水深测量技术的有益补充开展浅海区域的水深信息获取。
2、水深遥感探测有主动和被动两种,主动水深遥感探测目前以机载lidar测量为主,本发明为被动水深遥感探测方法。基于遥感技术开展水深反演的理论基础是:太阳光穿过大气层进入水体,然后与水体内各种组分发生吸收或散射作用,部分散射光直接穿出水面,部分到达水体底部经反射后又与水体组分发生吸收和散射后再穿出水面,最后含有水体和水深信息的光学信号被遥感传感器接收。将含有水深信息的遥感影像进行解析处理,再与实测水深建立函数关系,即可实现水深遥感反演。主流的遥感水深反演模型主要包括三种,分别为理论解析模型、半理论半经验模型和统计分析模型。理论解析模型是基于水体的辐射传输过程进行模型构建,精度较高,但模型参数较多且获取困难,实际推广应用较难。目前,应用最广的为半理论半经验模型,该模型在已有先验数据的基础上,结合水深与遥感影像辐亮度值之间的物理关系进行模型推导,比较常用的有单波段模型、多波段模型、对数线性模型和对数转换比值模型等。
3、浅海区域环境复杂,如海底底质类型的不均一性,对到达底部的光衰减程度存在差异;同时浅海受陆源物质影响较大,悬浮泥沙、黄色物质、浮游植物等造成近岸水体水色要素复杂。现有模型普遍存在较浅区域(0-5m)水深反演误差偏高的问题,同时,也没有充分结合近岸底质类型、水质情况和成像条件等对模型进行细化和筛选,造成模型的可移植性较差。
技术实现思路
1、有鉴于此,本发明旨在提出一种基于区域自适应的浅海水深遥感反演方法,结合已有研究基础,综合考虑水深范围、底质类型和水质情况,建立一种区域自适应的水深遥感反演方法,以期最大限度的提高近海水深的遥感反演精度。
2、区域自适应的基本思想就是根据水深反演区域深度、底质和水质的基本情况选取最佳模型和参数,而不是对整个水深反演区域用一个模型进行计算,最大限度的因模型差异和参数不同造成的反演误差。
3、为达到上述目的,本发明的技术方案是这样实现的:
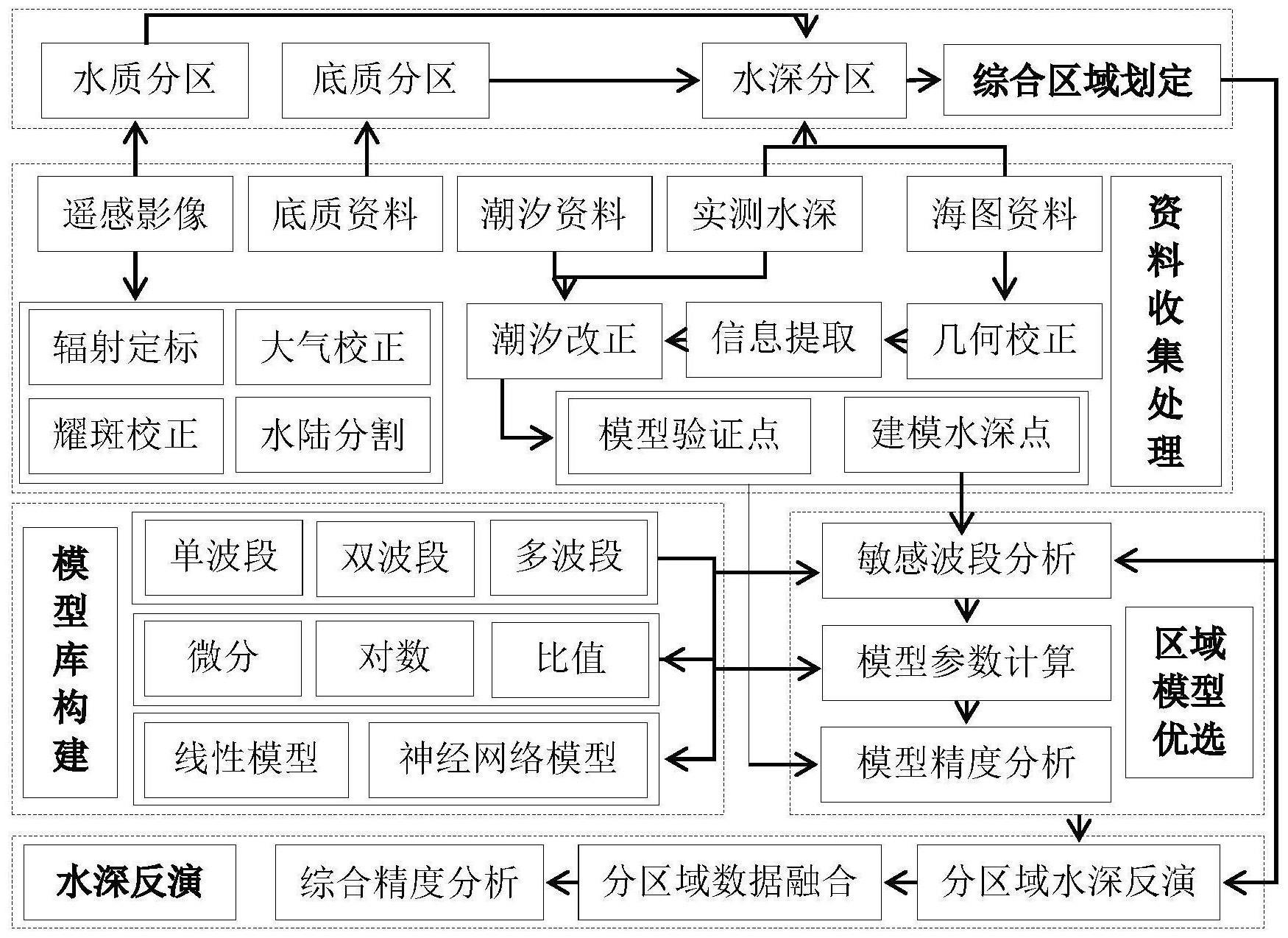
4、基于区域自适应的浅海水深遥感反演方法,包括以下步骤:
5、s1、资料收集与处理;
6、s2、根据步骤s1中收集与处理后的资料,综合区域划定;
7、s3、模型库构建,将水深遥感反演模型归纳为单波段模型、双波段模型、多波段模型、波段比值模型、对数转换比值模型、神经网络模型和机器学习模型;
8、s4、根据步骤s3构建的模型库进行区域模型优选;
9、s5、根据步骤s4优选的区域模型进行水深反演。
10、进一步的,在步骤s1中,包括以下步骤:
11、a1、资料收集:围绕研究区充分收集各类资料,包括遥感影像资料、实测水深资料、海图资料、潮汐资料和底质类型资料;
12、a2、遥感影像处理:针对遥感影像资料,开展几何校正、辐射定标、耀斑校正、大气校正和水陆分割处理;
13、a3、水深资料处理:包括海图校正和信息提取,以及水深信息潮汐改正。
14、进一步的,在步骤a2中,包括以下步骤:
15、(1)辐射定标:通过辐射定标处理,将影像dn值转化为表观辐亮度值l:
16、l=gain×dn+offset
17、其中,gain为增益系数,offset为偏移量,由影像头文件中获取;
18、(2)耀斑校正:水表太阳耀斑由太阳入水辐射的水表镜面反射引起,表现为亮白斑块,掩盖了目标水体的真实辐射特性,采用hedley法进行耀斑去除:
19、
20、其中,l′i为第i个波段去除耀斑后的辐亮度,li为第i个波段去除耀斑前的辐亮度,θ为回归线倾角,lnir为近红外波段辐亮度,为近红外波段辐亮度最小值;
21、(3)大气校正:用于消除大气和光照因素对地物反射的影响,获取地物真实的反射率数据;
22、(4)水陆分割:用于防止陆地像元参与水深反演计算,提高计算效率,需进行水陆分割,采用ndwi指数进行水陆分割:
23、
24、其中,pgreen和pnir为绿光波段和近红外波段的反射率值。
25、进一步的,在步骤a3中,包括以下步骤:
26、(1)海图校正:若为纸质海图,则首先进行扫描,然后依据公里外信息或者参考底图进行几何校正;
27、(2)海图信息提取:基于校正后的海图提取水深点和等深线专题信息;
28、(3)潮汐改正:海面高度由于受潮汐作用影响时刻在发生改变,需要将所有来源的水深资料统一到同一时间的潮位上才能应用,实测水深数据需要根据测量时间上的瞬时潮位与遥感影像拍摄瞬时的潮位差进行改正,海图获取的水深信息需要根据海图的深度基准面与遥感影像拍摄瞬时的潮位差进行改正。
29、进一步的,在步骤s1中,包括以下情况:
30、b1、基于水深情况分区:依据由海图获取的水深信息和实测水深资料,按照5米间隔对研究区进行分区;
31、b2、基于底质类型和水质情况分区:在基于水深进行分区的基础上,再结合研究区的底质类型资料和具体水质情况,对分区做进一步细分;
32、b3、综合分区:将详细分区的边界,分别向浅水区和深水区两个方向外扩10个像素,0米水深边界处可不外扩,并对外扩后存在上陆或其他不合理的情况进行综合处理,最后得到综合分区结果,作为后续水深反演的细分区域。
33、进一步的,在步骤s1中,具体模型形式如下:
34、c1、单波段模型
35、m=a0+a1x1
36、其中,m为反演水深值,a0和a1为模型系数,x1为某波段的光谱值;
37、c2、双波段模型
38、m=a0+a1x1+a2x2
39、其中,m为反演水深值,a0、a1和a2为模型系数,x1和x2为某波段的光谱值,也可选用两个对水体有较强穿透能力的波段做比值处理;
40、c3、多波段模型
41、m=a0+a1x1+a2x2+…+anxn
42、其中,m为反演水深值,a0、a1和an为模型系数,x1、x2和xn为某波段的光谱值;
43、c4、波段比值模型
44、
45、其中,m为反演水深值,a0和a1为模型系数,x1和x2分别为两个波段的光谱值;
46、c5、对数转换比值模型
47、
48、其中,m为反演水深值,a0和a1为模型系数,rω(x1)和rω(x2)分别为两个波段的反射率值,a、b、m、n为模型调节因子;
49、c6、神经网络模型
50、包括bp神经网络、lstm、cnn、rnn、dbn、rbm,首先建立遥感影像和实测水深数据空间上匹配的数据集,然后将其随机分为训练数据和测试数据,进行模型的训练和测试,建立最优lstm水深反演模型,lstm神经元的运算公式为:
51、it=sigmoid(wxi·xt+whi·ht-1+bi)
52、ft=sigmoid(wxf·xt+whf·ht-1+bf)
53、
54、
55、
56、其中,表示hadamard乘积,xt为t个神经元的输入;ht-1为第t-1个神经元的输出,wxi、wxf、wxc、wxo分别为不同运算中波段xt对应权重,whi、whf、whc、who分别为不同运算中波段ht-1对应权重;bi、bf、bc、bo为相应运算偏置值,it、ft、ot分别控制输入、遗忘及输出门控;
57、ct为第t个神经元的细胞状态,它结合上一神经元的细胞状态及当前神经元输入的新数据,形成新的细胞状态。
58、进一步的,在步骤s1中,包括以下步骤:
59、d1、水深点选取:依据分区范围选取水深点,再根据模型构建需求,将水深点随机分成两部分,一部分用于模型构建,另一部分用于模型验证;
60、d2、敏感波段选取:通过遥感影像光谱特征分析或通过光谱数据与水深数据进行统计相关分析确定区域水深反演的敏感波段;
61、d3、模型构建:基于模型构建水深点,依次构建单波段模型、双波段模型、多波段模型、波段比值模型、对数转换比值模型、神经网络模型和机器学习模型,确定每一类模型的具体参数;
62、d4、模型验证与优选:利用构建的每一类模型逐一对区域遥感影像进行水深反演,并利用模型验证水深点,从平均绝对误差和平均相对误差两方面对模型反演结果进行精度评价,选取精度最优的模型为本区域的反演模型:
63、
64、
65、其中,zi为第i个验证点的水深值,δzi为第i个验证点的水深误差值。
66、进一步的,在步骤s1中,包括以下步骤:
67、e1、分区域水深反演:利用优选后的分区域水深反演模型进行区域水深反演,得到分区域的水深反演结果,分别为dz1、dz2、dz3……;
68、e2、分区域水深融合:对分区域水深反演结果进行拼接,首先需要将不同分辨率的结果进行统一,采用“移去-恢复”法形成恒定分辨率,然后对通过外扩得到的边界重叠区域的水深值进行线性加权,权重依据距离反演区域边界的远近确定,越靠近区域中心,距边界越远,则权重越大,重叠区内的水深值按以下公式确定:
69、m=ml×fl+mr×(1-fl)
70、
71、其中,m为重叠区内某一位置的反演水深值,ml和mr分别为相邻两个区域的重叠区域内该位置的水深反演值,fl为其中一个区域的权值,r为该位置距区域边界的距离,r为重叠区域的总宽度;
72、e3、综合精度分析:利用全部的模型验证水深点对融合后的水深反演结果从mae和mre两方面进行精度评价。
73、进一步的,本方案公开了一种电子设备,包括处理器以及与处理器通信连接,且用于存储所述处理器可执行指令的存储器,所述处理器用于执行基于区域自适应的浅海水深遥感反演方法。
74、进一步的,本方案公开了一种计算机可读取存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现基于区域自适应的浅海水深遥感反演方法。
75、相对于现有技术,本发明所述的基于区域自适应的浅海水深遥感反演方法具有以下有益效果:
76、(1)本发明所述的基于区域自适应的浅海水深遥感反演方法,结合已有研究基础,综合考虑水深范围、底质类型和水质情况,建立一种区域自适应的水深遥感反演方法,以期最大限度的提高近海水深的遥感反演精度;
77、(2)本发明所述的基于区域自适应的浅海水深遥感反演方法,区域自适应的基本思想就是根据水深反演区域深度、底质和水质的基本情况选取最佳模型和参数,而不是对整个水深反演区域用一个模型进行计算,最大限度的因模型差异和参数不同造成的反演误差。
- 还没有人留言评论。精彩留言会获得点赞!