叶轮机内流激光多普勒同轴测量装置及其调试和试验方法与流程
1.本发明属于叶轮机内流光学测量技术领域,具体涉及一种叶轮机内流激光多普勒同轴测量装置及其调试和试验方法。
背景技术:
2.激光多普勒测速(laser doppler anemometer,简称lda)技术是利用激光的高相干性和高能量测量流体速度的一种光学测速技术。其测速原理是:两条激光光束汇聚一个焦点时,发生干涉,生成明暗相间的干涉条纹,形成测量体。当流体携带示踪粒子经过测量体时,示踪粒子散射干涉条纹的激光产生光强变化。由于已知测量体内干涉条纹的宽度,lda接收端根据示踪粒子散射光强的变化频率即可得出明暗间隔时间,进而计算出流体速度。lda技术具有不干扰流场、空间分辨率高、动态响应快、测量范围宽、方向灵敏性好、测量精度高等优点。因此,lda技术特别适用于边界层、分离流、涡流以及跨、超音等易扰动湍流场的测量。
3.叶轮机是燃气涡轮航空发动机、燃气轮机、蒸汽轮机、泵与风机等流体机械进行热功转换的核心部件,在人们日常工作、生活甚至整个国民经济运转过程中发挥着不可替代的作用。叶轮机内部流场的精细测量是对叶轮机进行流场诊断、性能评估、优化设计以及流动机理研究的基础。
4.目前,叶轮机内部流场的激光多普勒测速尚存在以下技术难题:一是,叶轮机机匣是类似圆管的回转面(不一定是等直径的圆柱面,通常叶轮机直径沿主轴方向前后会有变化),应用lda技术穿过回转面的光学视窗对内部流动进行移动测量时,lda的探头轴线若不能始终保持在被测回转面的法线方向即保持同轴测量,就会因偏离测量轴即离轴测量造成lda的两干涉光束在回转面视窗玻璃表面的入射角度不同,两束激光穿过视窗玻璃的折射量不同,从而导致lda激光光束穿过回转面玻璃视窗后不易形成稳定的焦点,不能保持稳定的测量体,导致叶轮机内部流动lda连续移动测量无法完成。若每一个测点都需要对两干涉光束进行精确调整,则测量效率十分低下;二是,现有lda技术,测点布置不够灵活,无法提供沿被测叶轮机轴线各个位置截面与回转面即不同叶片高度截面(简称等叶高截面)速度场分布信息;三是,现有lda探头位移装置通常安装在被测叶轮机的机匣上,这样在开展lda测量实验时,由于叶轮机自身往往存在结构振动,若振动传导至lda测量探头会显著干扰测量,影响测量结果;四是,针对已有的叶轮机,在实验过程中通常无法精确定位其主轴轴心的位置。
5.当前,亟需发展一种叶轮机内流激光多普勒同轴测量装置及其调试和试验方法。
技术实现要素:
6.本发明所要解决的技术问题在于克服叶轮机等类似圆管内部流场激光多普勒测量现有技术缺陷,提供一种叶轮机内流激光多普勒同轴测量装置及其调试和试验方法。
7.本发明的叶轮机内流激光多普勒同轴测量装置,其特点是,所述的测量装置包括圆周方向位移组件、半径方向位移组件、轴线方向位移组件和可调支撑底座;可调支撑底座的独立支撑座与叶轮机试验件的支撑座隔离,独立支撑座的边缘设置有4个螺母丝杆,2个螺母丝杆一组,每组螺母丝杆上固定1根直线导轨,2根直线导轨相互平行且均垂直于叶轮机试验件的中心轴线,2根直线导轨上固定1个支架;圆周方向位移组件的齿轮与圆弧齿条副固定在可调支撑底座的支架上,齿轮与圆弧齿条副环绕在叶轮机试验件的光学窗口外围,齿轮与圆弧齿条副的中心轴线与叶轮机试验件的中心轴线重合;齿轮与圆弧齿条副上设置有圆弧导轨模组,圆周方向带刹车步进电机与减速机通过齿轮与圆弧齿条副一起拖动轴线方向位移组件、半径方向位移组件和lda探头沿圆弧导轨模组在圆周方向上做周线运动;轴线方向位移组件的轴线方向直线位移模组与圆周方向位移组件上伸出的连接件固定连接,轴线方向直线位移模组与叶轮机试验件的中心轴线平行,轴线方向带刹车步进电机通过轴线方向直线位移模组带动半径方向位移组件做平行于叶轮机试验件的中心轴线的直线运动;半径方向位移组件的半径方向直线位移模组垂直固定在轴线方向直线位移模组上,半径方向直线位移模组位于叶轮机试验件的半径方向,半径方向直线位移模组上固定lda探头;半径方向带刹车步进电机通过半径方向直线位移模组带动lda探头沿叶轮机试验件的半径方向移动。
8.本发明的叶轮机内流激光多普勒同轴测量装置的调试方法,包括以下步骤:s21.将千分表固定在半径方向直线位移模组上,通过半径方向带刹车步进电机,沿叶轮机试验件的半径方向移动千分表,直至千分表的测头接触叶轮机试验件被测机匣的回转面玻璃视窗表面;s22.通过轴线方向带刹车步进电机控制轴线方向直线位移模组沿平行于叶轮机试验件的中心轴线方向移动,带动千分表的测头到达预先设置的一个测量平面;s23.在选中的测量平面上,通过减速机控制圆周方向带刹车步进电机沿齿轮与圆弧齿条副的圆弧导轨模组做弧线运动,带动千分表的测头沿叶轮机试验件做周线运动,在周线运动过程中始终保持千分表的测头接触回转面玻璃视窗表面,通过可调支撑底座的独立支撑座的4个螺母丝杆不断调整2根直线导轨的姿态,直至千分表的指针跳动量小于等于0.1mm,这样,在换装lda探头后,即保证了在该测量平面上lda探头的周线运动轨迹与回转面玻璃视窗表面,也就是叶轮机试验件表面同轴;s24.在不同轴向位置再选择1~2个测量平面,重复步骤s22和s23,即可保证在任意轴向位置测量平面上lda探头的周线运动轨迹与回转面玻璃视窗表面,也就是叶轮机试验件表面同轴。
9.本发明的叶轮机内流激光多普勒同轴测量装置的试验方法,包括以下步骤:s31.制定试验计划表;按照叶轮机内流激光多普勒同轴测量试验需求,制定试验计划表,试验计划表的内容包括测量单点序列、测量平面序列和测量回转面序列;s32.进行叶轮机内流激光多普勒单点同轴测量试验;s321.选择测量平面序列中的一个测量单点,通过圆周方向位移组件、半径方向位
移组件、轴线方向位移组件调整lda探头位置,将叶轮机内流激光多普勒同轴测量装置的测量体与测量单点重合,将圆周方向带刹车步进电机、半径方向带刹车步进电机和轴线方向带刹车步进电机进行刹车停止;s322.启动叶轮机,播撒示踪粒子,打开lda探头,获得测量单点的流速,关闭lda探头,停止播撒示踪粒子,关闭叶轮机;s323.重复步骤s321~s322,直至完成所有的测量单点测速;s33.进行叶轮机内流激光多普勒平面同轴测量试验;s331.进行叶轮机内流激光多普勒同轴测量装置调试;选择测量平面序列中的一个测量平面,按照叶轮机内流激光多普勒同轴测量装置的调试方法,调整可调支撑底座的独立支撑座,直至千分表的指针跳动量小于等于0.1mm,拆除千分表,安装lda探头;s332.启动叶轮机,待叶轮机内流稳定后,播撒示踪粒子,打开lda探头;s333.通过减速机控制圆周方向带刹车步进电机沿齿轮与圆弧齿条副的圆弧导轨模组做弧线运动,带动lda探头沿叶轮机试验件做周线运动,完成测量平面上第一条弧线的测速,圆周方向带刹车步进电机刹车停止;s334.启动半径方向带刹车步进电机,半径方向带刹车步进电机通过半径方向直线位移模组带动lda探头沿叶轮机试验件的半径方向移动至下一条弧线位置,半径方向带刹车步进电机刹车停止,重复步骤s333,完成测量平面上下一条弧线的测速;s335.重复步骤s334,直至完成选定的测量平面测速;s336.重复步骤s333~s335,直至完成所有的测量平面测速,关闭lda探头,停止播撒示踪粒子,关闭叶轮机;s34.进行叶轮机内流激光多普勒回转面同轴测量试验;s341.进行叶轮机内流激光多普勒同轴测量装置调试;选择测量回转面序列中的一个测量回转面,按照叶轮机内流激光多普勒同轴测量装置的调试方法,调整可调支撑底座的独立支撑座,直至千分表的指针跳动量小于等于0.1mm,拆除千分表,安装lda探头;s342.启动叶轮机,待叶轮机内流稳定后,播撒示踪粒子,打开lda探头;s343.启动轴线方向带刹车步进电机,轴线方向带刹车步进电机通过轴线方向直线位移模组带动半径方向位移组件和lda探头沿叶轮机试验件的轴线方向移动至测量回转面的第一个轴向位置,轴线方向带刹车步进电机停止;s344.启动半径方向带刹车步进电机,半径方向带刹车步进电机通过半径方向直线位移模组带动lda探头沿叶轮机试验件的半径方向移动至测量回转面第一个轴向位置处的设定半径,半径方向带刹车步进电机停止;s345.通过减速机控制圆周方向带刹车步进电机沿齿轮与圆弧齿条副的圆弧导轨模组做弧线运动,带动lda探头沿叶轮机试验件做周线运动,完成测量回转面上第一条弧线的测速,圆周方向带刹车步进电机刹车停止;s346.启动轴线方向带刹车步进电机,轴线方向带刹车步进电机通过轴线方向直线位移模组带动半径方向位移组件和lda探头沿叶轮机试验件的轴线方向移动至测量回转面的下一个轴向位置,轴线方向带刹车步进电机停止,重复步骤s344和s345,完成测量回转
面上下一条弧线的测速;s347.重复步骤s346,直至完成选定的测量回转面测速;s348.重复步骤s343~s347,直至完成所有的测量回转面测速,关闭lda探头,停止播撒示踪粒子,关闭叶轮机。
10.本发明的叶轮机内流激光多普勒同轴测量装置,包括圆周方向位移组件、半径方向位移组件、轴线方向位移组件与可调支撑底座。圆周方向位移组件实现了叶轮机内流的lda同轴测量,克服了叶轮机及类似圆管流动等lda移动测量不易形成稳定测量体的技术难题;半径方向位移组件实现了lda测点沿半径方向的位置调整;轴向位移组件实现了lda测点沿轴线方向的位置调整;三个位移组件的步进电机的刹车功能实现了lda测量探头驻点数据采集及断电保持功能。另外,通过三个位移组件的协同配合,实现了沿被测叶轮机轴线各个位置截面或任意回转截面扫掠式测量,解决了当前叶轮机lda测量截面少且获取速度场信息不丰富的技术难题;整个位移装置由可调支撑底座支撑,通过可调支撑底座上的两个直线导轨进行微调,能够接近或远离被测叶轮机;通过可调支撑底座上的四个螺母丝杆能够使位移装置保持底座水平。此外,由于位移装置采用独立支撑方式,使得位移装置与被测叶轮机机匣彻底“脱离”接触,消除了叶轮机自身结构振动对lda测量造成的干扰。
11.本发明的叶轮机内流激光多普勒同轴测量装置的调试方法利用千分表,通过位移装置夹持千分表沿被测叶轮机的机匣(玻璃视窗)表面做圆周方向移动,在移动的过程中始终保持千分表的测头接触被测叶轮机的机匣表面(玻璃视窗),通过可调支撑底座上的两个导轨和四个丝杆微调位移装置的姿态,最终使位移装置做圆周方向位移时的千分表的指针跳动量最小,此时,位移装置在圆周方向的移动轨迹与被测叶轮机的机匣(玻璃视窗)表面圆弧就建立了同心(同轴)的位置关系,从而克服了当前叶轮机lda测量过程中无法精确定位轴心的技术难题,方法精确,可操作性强。
12.本发明的叶轮机内流激光多普勒同轴测量装置的试验方法,在试验过程中通过可调支撑底座支撑圆周方向位移组件、半径方向位移组件和轴线方向位移组件,按照轴线方向位移组件定位、半径方向位移组件定位和圆周方向位移组件扫掠的顺序控制lda探头按照预先设定的路径完成叶轮机内流激光多普勒同轴测量。
13.本发明的叶轮机内流激光多普勒同轴测量装置及其调试和试验方法能够精确确定叶轮机的主轴轴线位置,在移动测量过程中始终产生稳定的测量体,通过lda干涉光束穿过叶轮机或其他圆形截面管道的玻璃视窗,测量被测叶轮机轴线各个位置截面与不同叶片高度截面的速度场分布信息,不受叶轮机自身结构振动干扰,具有工程实用价值。
附图说明
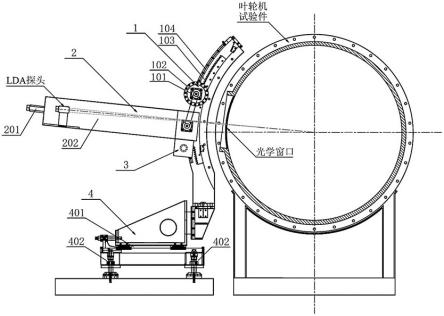
14.图1为本发明的叶轮机内流激光多普勒同轴测量装置的结构示意图(主视图);图2为本发明的叶轮机内流激光多普勒同轴测量装置的结构示意图(侧视图)。
15.图中,1.圆周方向位移组件;2.半径方向位移组件;3.轴线方向位移组件;4.可调支撑底座;101.圆周方向带刹车步进电机;102.减速机;103.齿轮与圆弧齿条副;104.圆弧导轨模组;201.半径方向带刹车步进电机;202.半径方向直线位移模组;
301.轴线方向带刹车步进电机;302.轴线方向直线位移模组;401.直线导轨;402.螺母丝杆。
实施方式
16.下面结合附图和实施例详细说明本发明。
17.如图1、图2所示,本实施例的叶轮机内流激光多普勒同轴测量装置包括圆周方向位移组件1、半径方向位移组件2、轴线方向位移组件3和可调支撑底座4;可调支撑底座4的独立支撑座与叶轮机试验件的支撑座隔离,独立支撑座的边缘设置有4个螺母丝杆402,2个螺母丝杆402一组,每组螺母丝杆402上固定1根直线导轨401,2根直线导轨401相互平行且均垂直于叶轮机试验件的中心轴线,2根直线导轨401上固定1个支架;圆周方向位移组件1的齿轮与圆弧齿条副103固定在可调支撑底座4的支架上,齿轮与圆弧齿条副103环绕在叶轮机试验件的光学窗口外围,齿轮与圆弧齿条副103的中心轴线与叶轮机试验件的中心轴线重合;齿轮与圆弧齿条副103上设置有圆弧导轨模组104,圆周方向带刹车步进电机101与减速机102通过齿轮与圆弧齿条副103一起拖动轴线方向位移组件3、半径方向位移组件2和lda探头沿圆弧导轨模组104在圆周方向上做周线运动;轴线方向位移组件3的轴线方向直线位移模组302与圆周方向位移组件1上伸出的连接件固定连接,轴线方向直线位移模组302与叶轮机试验件的中心轴线平行,轴线方向带刹车步进电机301通过轴线方向直线位移模组302带动半径方向位移组件2做平行于叶轮机试验件的中心轴线的直线运动;半径方向位移组件2的半径方向直线位移模组202垂直固定在轴线方向直线位移模组302上,半径方向直线位移模组202位于叶轮机试验件的半径方向,半径方向直线位移模组202上固定lda探头;半径方向带刹车步进电机201通过半径方向直线位移模组202带动lda探头沿叶轮机试验件的半径方向移动。
18.本实施例的叶轮机内流激光多普勒同轴测量装置的调试方法,包括以下步骤:s21.将千分表固定在半径方向直线位移模组202上,通过半径方向带刹车步进电机201,沿叶轮机试验件的半径方向移动千分表,直至千分表的测头接触叶轮机试验件被测机匣的回转面玻璃视窗表面;s22.通过轴线方向带刹车步进电机301控制轴线方向直线位移模组302沿平行于叶轮机试验件的中心轴线方向移动,带动千分表的测头到达预先设置的一个测量平面;s23.在选中的测量平面上,通过减速机102控制圆周方向带刹车步进电机101沿齿轮与圆弧齿条副103的圆弧导轨模组104做弧线运动,带动千分表的测头沿叶轮机试验件做周线运动,在周线运动过程中始终保持千分表的测头接触回转面玻璃视窗表面,通过可调支撑底座4的独立支撑座的4个螺母丝杆402不断调整2根直线导轨401的姿态,直至千分表的指针跳动量小于等于0.1mm,这样,在换装lda探头后,即保证了在该测量平面上lda探头的周线运动轨迹与回转面玻璃视窗表面,也就是叶轮机试验件表面同轴;s24.在不同轴向位置再选择1~2个测量平面,重复步骤s22和s23,即可保证在任意轴向位置测量平面上lda探头的周线运动轨迹与回转面玻璃视窗表面,也就是叶轮机试验件表面同轴。
19.本实施例的叶轮机内流激光多普勒同轴测量装置的试验方法,包括以下步骤:s31.制定试验计划表;按照叶轮机内流激光多普勒同轴测量试验需求,制定试验计划表,试验计划表的内容包括测量单点序列、测量平面序列和测量回转面序列;s32.进行叶轮机内流激光多普勒单点同轴测量试验;s321.选择测量平面序列中的一个测量单点,通过圆周方向位移组件1、半径方向位移组件2、轴线方向位移组件3调整lda探头位置,将叶轮机内流激光多普勒同轴测量装置的测量体与测量单点重合,将圆周方向带刹车步进电机101、半径方向带刹车步进电机201和轴线方向带刹车步进电机301进行刹车停止;s322.启动叶轮机,播撒示踪粒子,打开lda探头,获得测量单点的流速,关闭lda探头,停止播撒示踪粒子,关闭叶轮机;s323.重复步骤s321~s322,直至完成所有的测量单点测速;s33.进行叶轮机内流激光多普勒平面同轴测量试验;s331.进行叶轮机内流激光多普勒同轴测量装置调试;选择测量平面序列中的一个测量平面,按照叶轮机内流激光多普勒同轴测量装置的调试方法,调整可调支撑底座4的独立支撑座,直至千分表的指针跳动量小于等于0.1mm,拆除千分表,安装lda探头;s332.启动叶轮机,待叶轮机内流稳定后,播撒示踪粒子,打开lda探头;s333.通过减速机102控制圆周方向带刹车步进电机101沿齿轮与圆弧齿条副103的圆弧导轨模组104做弧线运动,带动lda探头沿叶轮机试验件做周线运动,完成测量平面上第一条弧线的测速,圆周方向带刹车步进电机101刹车停止;s334.启动半径方向带刹车步进电机201,半径方向带刹车步进电机201通过半径方向直线位移模组202带动lda探头沿叶轮机试验件的半径方向移动至下一条弧线位置,半径方向带刹车步进电机201刹车停止,重复步骤s333,完成测量平面上下一条弧线的测速;s335.重复步骤s334,直至完成选定的测量平面测速;s336.重复步骤s333~s335,直至完成所有的测量平面测速,关闭lda探头,停止播撒示踪粒子,关闭叶轮机;s34.进行叶轮机内流激光多普勒回转面同轴测量试验;s341.进行叶轮机内流激光多普勒同轴测量装置调试;选择测量回转面序列中的一个测量回转面,按照叶轮机内流激光多普勒同轴测量装置的调试方法,调整可调支撑底座4的独立支撑座,直至千分表的指针跳动量小于等于0.1mm,拆除千分表,安装lda探头;s342.启动叶轮机,待叶轮机内流稳定后,播撒示踪粒子,打开lda探头;s343.启动轴线方向带刹车步进电机301,轴线方向带刹车步进电机301通过轴线方向直线位移模组302带动半径方向位移组件2和lda探头沿叶轮机试验件的轴线方向移动至测量回转面的第一个轴向位置,轴线方向带刹车步进电机301停止;s344.启动半径方向带刹车步进电机201,半径方向带刹车步进电机201通过半径方向直线位移模组202带动lda探头沿叶轮机试验件的半径方向移动至测量回转面第一个轴向位置处的设定半径,半径方向带刹车步进电机201停止;
s345.通过减速机102控制圆周方向带刹车步进电机101沿齿轮与圆弧齿条副103的圆弧导轨模组104做弧线运动,带动lda探头沿叶轮机试验件做周线运动,完成测量回转面上第一条弧线的测速,圆周方向带刹车步进电机101刹车停止;s346.启动轴线方向带刹车步进电机301,轴线方向带刹车步进电机301通过轴线方向直线位移模组302带动半径方向位移组件2和lda探头沿叶轮机试验件的轴线方向移动至测量回转面的下一个轴向位置,轴线方向带刹车步进电机301停止,重复步骤s344和s345,完成测量回转面上下一条弧线的测速;s347.重复步骤s346,直至完成选定的测量回转面测速;s348.重复步骤s343~s347,直至完成所有的测量回转面测速,关闭lda探头,停止播撒示踪粒子,关闭叶轮机。
20.本实施例的叶轮机内流激光多普勒同轴测量装置的lda探头在半径700mm的试验件表面圆周方向上30
°
移动范围内半径方向最大距离变动为0.1mm,同轴度达1.4
×
10-4
。具体的位移范围及位移精度参数见表1。
21.表1lda探头位移方位行程位移精度试验件圆周方向(θ)-15
°
≤θ≤15
°
≤
±
0.01
°
试验件半径方向(r)300mm≤r≤1200mm≤
±
0.05mm试验件轴线方向(z)0≤z≤800mm≤
±
0.05mm。
22.尽管本发明的实施方案已公开如上,但其并不仅限于说明书和实施方式中所列运用,对于熟悉本领域的人员而言,在不脱离本发明原理的前提下,本发明公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1