一种基于三维激光点云的隧道掌子面位移场监测方法
本发明涉及隧道施工领域,具体涉及一种基于三维激光点云的隧道掌子面位移场监测方法。
背景技术:
1、三维激光扫描是近年迅速发展起来的新型遥感技术,相对于传统的单点监测技术,三维激光扫描能够全面地反映被监测对象的变形趋势和空间分布,在工程监测领域具有重要的应用意义。由于其对工作环境要求较低,即使在恶劣的无光条件下也能够提供高精度和高密度的主动测量数据等优点。
2、对于隧道开挖面变形监测的现有遥感技术,主要包括激光雷达和数字图像处理两大类。其中,激光雷达技术采用传统的全站仪监测,并不适用于开挖面位移监测,难以在多次监测过程中定位到相同的特征点,并且在隧道开挖面安装标靶不具有很强的现场可操作性;而数字图像处理技术受环境条件的限制,并不能达到很高的精度。综上,现有的对于隧道开挖面空间变形监测的遥感技术主要存在以下技术限制:
3、(1)基于三维激光扫描的工程监测对激光点云配准精度要求很高,监测点云配准研究主要以刚体点云配准为主,往往要求被监测结构体外存在稳定的刚体参照物,然而隧道开挖面附近结构体和地面都在变化,这样的施工环境中基本不存在理想刚体;
4、(2)基于数字图像处理的技术未解决隧道内弱光照和多粉尘环境对数据收集的影响;
5、(3)基于激光雷达的技术多关注于隧道沿轴线方向的变形,然而轴线方向的变形可能是由于竖向变形引起的,这种方法无视隧道开挖面的空间变形,则无法精确预测塌方部位、深入分析开挖面的受力状态;
6、(4)基于激光雷达的技术大多数依赖于在开挖面上安置标靶,不能充分发挥“遥感”测量的优势,且单独安置标靶存在安全隐患。
7、此外,现有技术中也有通过三维激光扫描来进行隧道监控的技术,如cn106930784 a所公开的“基于三维激光扫描的隧道监控方法”,然而该方法是通过设置监测点的方式来估算各断面的拱顶沉降和周边收敛趋势,其无法精确的进行隧道掌子面在不同里程下的变形监测,工程指导意义有限。
技术实现思路
1、本发明的目的在于提供一种基于三维激光点云的隧道掌子面位移场监测方法,以解决现有技术无法精确得到隧道掌子面在不同里程下的位移场的问题,实现充分考虑隧道开挖面非刚体变形的特性,提高空间变形监测精度、更加满足工程应用需求的目的。
2、本发明通过下述技术方案实现:
3、一种基于三维激光点云的隧道掌子面位移场监测方法,包括:
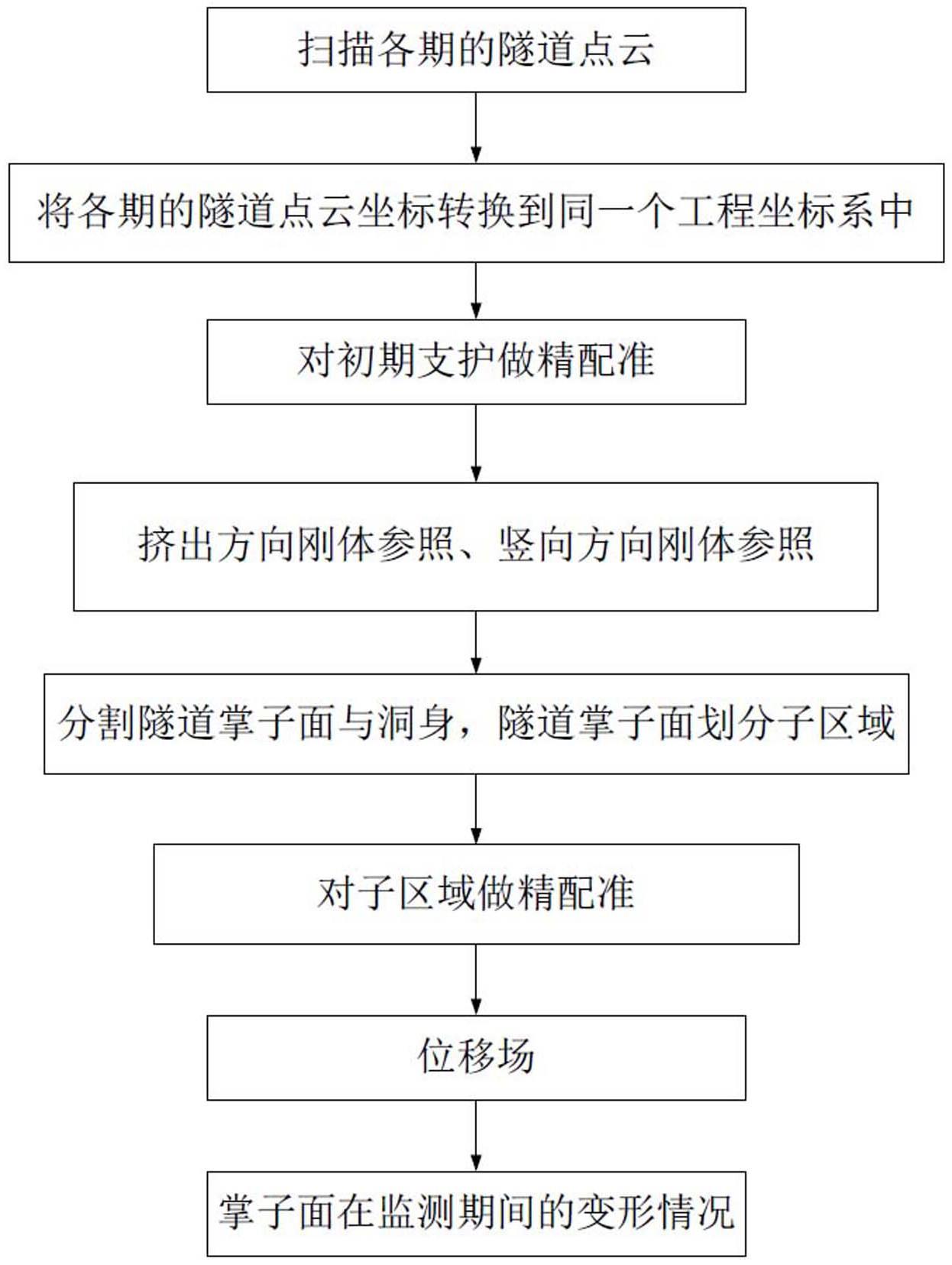
4、步骤s1、在隧道开挖过程中,通过三维激光扫描仪扫描各期的隧道点云,扫描范围包括从三维激光扫描仪上方的初期支护至隧道掌子面;
5、步骤s2、将各期的隧道点云坐标转换到同一个工程坐标系中;
6、步骤s3、基于初期支护的点云,对初期支护做精配准,得到初配准后的掌子面点云、并使初期支护在掌子面挤出方向得到修正;
7、步骤s4、以拱顶处的初期支护作为判断掌子面挤出位移的稳定刚体参照,定义为挤出方向刚体参照;以控制点作为判断掌子面竖向位移的稳定刚体参照,定义为竖向方向刚体参照;
8、步骤s5、根据点云法向量与掌子面上的挤出方向向量夹角的不同,从初配准后的掌子面点云中分割隧道掌子面与洞身;
9、步骤s6、将分割出的隧道掌子面划分为多个子区域,使每个子区域满足刚体假设;
10、步骤s7、基于刚体假设对子区域做精配准,得出每一期相对于第一期的平移矩阵,所述平移矩阵包括竖向位移和横向位移;
11、再将各期子区域点云投影生成的矩阵用相应的平移矩阵配准后,得到对应挤出位移;
12、将同一期所有子区域的位移组合,得到位移场;
13、通过分析各期掌子面的位移场,得到掌子面在监测期间的变形情况。
14、针对现有技术无法精确得到隧道掌子面在不同里程下的位移场的问题,本发明提出一种一种基于三维激光点云的隧道掌子面位移场监测方法。首先,在隧道开挖过程中,在不同里程下通过三维激光扫描仪进行扫描,得到各期的隧道点云;扫描范围包括从三维激光扫描仪上方的初期支护至隧道掌子面,以使得所得到的隧道点云中至少包括完整的隧道掌子面和局部的初期支护。
15、然后对各期的点云数据进行坐标转换:因为三维激光扫描仪有单独的坐标系,每期点云都在不同的坐标系中,为了获取掌子面变形情况,需要先把不同期点云进行配准后才能分析掌子面的变形情况,然而不同坐标系下无法配准点云,所以本方法需要将各期点云坐标转换到同一个工程坐标系中,以此为后续的配准做好充分准备。在完成坐标转换后,对各期的初期支护做精配准,该过程即是对隧道掌子面的初配准,配准后的隧道点云为初配准后的掌子面点云,该配准过程能够同时使得初期支护在掌子面挤出方向得到修正。然后确定刚体参照:对于隧道开挖面附近结构体和地面都处于不断变化中,现场施工环境不存在理想刚体的问题,为了克服这一问题,本方法引入拱顶处的初期支护作为判断掌子面挤出位移的稳定刚体参照,定义为挤出方向刚体参照,并以控制点作为判断掌子面竖向位移的稳定刚体参照,定义为竖向方向刚体参照;这种刚体参照的引入,可解决施工环境不存在理想刚体的问题,填补了现有技术的空白,使得在不额外增设参照刚体的前提下可为后续的掌子面精配准提供科学依据。其中,控制点为监控量测领域的通用技术术语,在此不做赘述;本技术以控制点作为竖向方向的刚体参照,控制点的坐标信息不会随着隧道开挖而改变,是极优的参照,作为本技术中竖向方向刚体参照时,可以直接使用,不会额外增加工作量。
16、然后根据点云法向量与掌子面上的挤出方向夹角的不同,从初配准后的掌子面点云中分割隧道掌子面与洞身,再基于分割出的隧道掌子面,对各期的隧道掌子面做精配准,得到隧道掌子面的各期位移结果。
17、之后将分割出的隧道掌子面划分为多个子区域,使每个子区域满足刚体假设;最后基于刚体假设对子区域做精配准,得出每一期相对于第一期的平移矩阵,所述平移矩阵包括竖向位移和横向位移;再将各期子区域点云投影生成的矩阵(即掌子面划分的子区域投影生成的矩阵)用相应的平移矩阵配准后,得到对应挤出位移;将同一期所有子区域的位移组合,得到位移场;最后通过分析各期掌子面的位移场,即可得到掌子面在监测期间的变形情况。
18、本技术中的刚体假设,是由于在受力后整个掌子面会发生变形,将掌子面划分为多个小块后,认为这些小块在受力后大小和形状都没有改变、没有变形。
19、可以看出,本方法充分考虑了隧道开挖面非刚体变形的特性,提高了空间变形监测精度,更加符合工程现场的应用需求,对实际施工具有更强的指导意义。
20、本技术通过对三维激光扫描仪的设置,使扫描范围包括从三维激光扫描仪上方的初期支护至隧道掌子面,即包括了隧道掌子面、部分初期支护、以及掌子面周围的部分洞身,进而确保对隧道掌子面的充分扫描,以此杜绝掌子面点云数据局部缺失的风险。
21、进一步的,步骤s1中,三维激光扫描仪架设在距隧道掌子面1d的隧道中线位置处,d为隧道断面直径;从第二期开始,往后各期的三维激光扫描仪架设位置,与第一期的三维激光扫描仪架设位置的偏差,均不大于50cm。
22、本方案对三维激光扫描仪在各期下的架设位置及其定位方法进行了明确限定,以保证各期隧道点云的一致性。
23、进一步的,步骤s2中,将各期的隧道点云坐标转换到同一个工程坐标系中的方法包括:
24、步骤s201、在获取各期的隧道点云时置入全站仪和球棱镜;
25、步骤s202、通过全站仪实测各期的球棱镜球心;
26、步骤s203、通过三维激光扫描仪获取各期的球棱镜点云,并拟合出球心;
27、步骤s204、依次做坐标平移、坐标旋转,使拟合出的球心与实测球心重合,完成坐标转换。
28、本方案中的坐标转换实际是一种刚体转换,将点云通过平移和旋转完成坐标转换,得到在工程坐标系下的点云坐标。
29、进一步的,步骤s3中,对初期支护做精配准的方法包括:
30、步骤s301、根据坐标轴选取各期拱顶处初期支护的局部点云,将局部点云投影生成栅格数据矩阵,定义为矩阵 a;所述生成栅格数据矩阵的方法包括:以点云的x坐标、y坐标分别作为栅格数据矩阵的x坐标轴、y坐标轴,将点云的z坐标填充为矩阵数据;
31、对矩阵 a进行插值填充,再用二维连续小波中的墨西哥帽小波对矩阵 a的波动特征进行描述,得到具有起伏特征的矩阵 a';其中,通过如下公式对矩阵 a的波动特征进行描述:
32、
33、式中, cwt( p, q, s)为小波处理后的结果, s为尺度因子, g( x, y)为连续的2d信号,为母波,x为x坐标,y为y坐标, p、 q均为平移参数;
34、步骤s302、移动矩阵 an',使其与矩阵 an-1'数值最接近的位置进行配准,配准完成后得到初期支护的平移矩阵和旋转矩阵,其中:n表示初期支护的期数, an'表示第n期的矩阵 a', an-1'表示第n-1期的矩阵 a';
35、步骤s303、依期逐级迭代配准:将矩阵 an'与矩阵 an-1'配准后,再将矩阵 an-1'与矩阵 an-2'配准,直至矩阵 a2'与矩阵 a1'配准;通过如下公式完成各期初期支护的精配准,以得到的点云数据作为初配准后的掌子面点云:
36、
37、式中, t n为矩阵 an'的坐标表达, t n-1为tn与矩阵 an-1'配准后的坐标表达, t n-2为 t n-1与矩阵 an-2'配准后的坐标表达, t3为 t4与矩阵 a3'配准后的坐标表达, t2为 t3与矩阵 a2'配准后的坐标表达, t1为 t2与矩阵 a1'配准后的坐标表达, r1为第2期矩阵与第1期矩阵配准得到的旋转矩阵, m1为第2期矩阵与第1期矩阵配准得到的平移矩阵, r2为第3期矩阵与第2期矩阵配准得到的旋转矩阵, m2为第3期矩阵与第2期矩阵配准得到的平移矩阵, rs-2为第n-1矩阵与第n-2期矩阵配准得到的旋转矩阵, ms-2为第n-1矩阵与第n-2期矩阵配准得到的平移矩阵, rs-1为第n期矩阵与第n-1期矩阵配准得到的旋转矩阵, ms-1为第n期矩阵与第n-1期矩阵配准得到的平移矩阵。
38、可以看出,该公式中, r和 m分别表示旋转矩阵、平移矩阵,各自的下标则表示上一期与当期的配准情况。
39、在点云从三维激光坐标系转换到工程坐标系的过程中,会存在全站仪设站的水平误差、三维激光拟合球棱镜球心坐标误差、全站仪获取球棱镜球心和三维激光拟合得到的球心重合误差等,以上误差会增大点云配准的误差,最终影响掌子面的变形监测精度,因此,本方案在对隧道掌子面精配准前先对初期支护做精配准,其目的在于实现对掌子面的粗配准,以尽量减小坐标转换过程带来的误差。
40、本方案对各期的初期支护采用逐级迭代算法进行配准,能够有效克服陷入局部最优状态的缺陷,在刚体参照的点云逐级配准后,隧道掌子面的点云也就达到了粗配准状态。
41、本方案中的逐级迭代,是指对不同时期下的同一个初期支护依次进行配准,如:假定共有10期点云数据,首先将矩阵 a10'与矩阵 a9'配准,之后将矩阵 a9'与矩阵 a8'配准、将矩阵 a8'与矩阵 a7'配准,以此类推,直至矩阵 a2'与矩阵 a1'配准。其原理在于:初期支护受到力后可能会发生变形, a10'与 a9'最相似, a8'与 a10'间隔时间比 a9'更长,因此 a10'与 a8'的外貌差异更大,所以需要逐级迭代。
42、需要说明的是,隧道初期支护变形属于平面应变问题,因此初期支护结构拱顶处沿掌子面挤出方向的变形极小,沿掌子面挤出方向可以作为稳定的刚体参照,这也是本技术选择初期支护作为挤出方向的刚体参照的原因之一。
43、进一步的,步骤s5中,从初配准后的隧道点云中分割隧道掌子面与洞身的方法包括:
44、步骤s501、对初配准后的掌子面点云做坐标变换,使坐标系原点移动到隧道掌子面中心;将隧道点云绕坐标轴旋转,使z轴与掌子面挤出方向平行、y轴为隧道掌子面的竖向方向、x轴为隧道掌子面的横向方向;
45、步骤s502、计算各点云法向量与z坐标轴向量的夹角;
46、步骤s503、根据各点云法向量与z坐标轴向量的夹角,分割出掌子面和洞身。
47、提取隧道掌子面点云的目的,是为了将掌子面从隧道上单独截取出来进行后续分析。本方案首先对初配准后的隧道点云整体进行坐标变换,使坐标系原点移动到隧道掌子面中心,从而以整个掌子面三维坐标的平均值近似替代掌子面中心,之后进行绕坐标轴的旋转。然后,根据隧道洞身与掌子面法向量方向的差异性,从而分割洞身与掌子面,得到分割后的隧道掌子面。本领域技术人员应当理解,本方案中的z坐标轴,是指进行了步骤s501中坐标转换后的坐标系内的z坐标轴。
48、其中,由于隧道中线法向量与洞身法向量理论上应该相互垂直,隧道中线法向量与掌子面法向量理论上应该相互平行,因此本方案通过设置夹角阈值的方式,即可从抽稀后的点云中分割出洞身。
49、进一步的,步骤s502中,通过如下公式计算各点云法向量与z坐标轴向量的夹角:
50、;
51、式中, β为点云法向量与z坐标轴向量的夹角;为点云法向量,;为z坐标轴向量,。
52、进一步的,步骤s503中,分割出掌子面和洞身的方法包括:
53、步骤s5031、将55°≤ β≤120°的点云作为洞身点云,将其余点云作为掌子面点云;其中 β为点云法向量与z坐标轴向量的夹角;
54、步骤s5032、在原始点云数据中减去所述洞身点云,再通过密度聚类算法去噪,得到分割后的掌子面点云。
55、本方案设置夹角在55°~120°范围内的点云都作为洞身点云,可确保将全部洞身分割出来,避免漏掉部分洞身点云的情况出现;特别是对于因为隧道洞身长度大于1而形成的部分角度大于90度的洞身,可保证对其稳定分割。
56、进一步的,步骤s7中,得到位移场变化情况的方法包括:
57、步骤s701、通过如下方法将每个子区域单独投影生成栅格数据矩阵并定义为矩阵 bi:基于步骤s501坐标变换后,以该子区域点云的x坐标、y坐标分别作为栅格数据矩阵的x坐标轴、y坐标轴,将点云z坐标填充为矩阵数据;其中: i表示掌子面划分所得的第 i个子区域;
58、对矩阵 bi做插值填充,对插值填充后的子区域进行二维连续小波变换,用墨西哥帽小波对矩阵 bi的波动特征进行描述,再用正态分布函数表达矩阵 bi的波动特征,保留波动特征变换平缓的部分,得到具有起伏特征的矩阵 bi';
59、步骤s702、移动第n期的矩阵 bi',寻找与第n-1期的矩阵 bi'数值最接近的位置,完成配准,得到配准的子区域的平移矩阵,所述子区域的平移矩阵由横向位移和竖向位移组成;基于逐级迭代配准方法,得到第n期矩阵 bi'与第1期矩阵 bi'的平移矩阵,其中:n表示初期支护的期数。
60、本方案中的逐级迭代配准方法,可优选的采用如步骤s303中记载的方法,也可采用本领域技术人员能够实现的其余方法。
61、本领域技术人员应当理解,本技术中掌子面的期数等于初期支护的期数,因此本方案中的n应当理解为掌子面的期数,不过其数值上仍然等于初期支护的期数。
62、在所述竖向方向刚体参照下,将配准得到的竖直位移作为对应子区域的竖向位移,将同一期所有子区域的竖向位移的组合作为掌子面的竖向位移场;
63、计算第n期掌子面中的某一个子区域的横向位移与其同一行中中间子区域的横向位移的差值,该差值为该子区域的横向变形;计算出第n期所有子区域的横向变形,将所有子区域横向变形的组合作为掌子面的横向变形场;
64、在所述挤出方向刚体参照下,将前后两期子区域的矩阵 bi'用对应子区域的平移矩阵配准,对配准后的两期矩阵中相同位置的数据做差,对做差得到的值取平均值,作为前后两期子区域的相对挤出位移;再将第n期和第1期之间所有的相对挤出位移的和作为第n期子区域矩阵的挤出位移;将同一期所有子区域的挤出位移的组合作为掌子面的挤出位移场。
65、其中,挤出位移指的是:某一期子区域相对于第一期子区域在挤出方向上的位移;相对位移指的是:某一期子区域想对于前一期(或后一期)子区域在挤出方向的位移;因此,为了获得某一期子区域的挤出位移,需要将其以前的挤出位移进行求和。
66、进一步的,步骤s702中,所述数值最接近的位置通过如下方法得到:
67、将第n期的矩阵 bi'在给定范围内移动、使其与第n-1期的矩阵 bi'配准,每移动一次相当于配准一次;其中,每个子区域矩阵是单独配准的。
68、对配准后的两期矩阵,将相同位置的数字做差,再对每个差值取绝对值后求和;
69、将求和的值放入一个全新的空矩阵中,选取每次配准的值都放入空矩阵中后,以所述空矩阵的最小值作为此次配准的数值最接近的位置。
70、本方案给出了确定前述数值最接近的位置的具体方法。需要说明的是,其中的给定范围,需根据掌子面最大变形量的实际情况进行确定,在此不做限定;本领域技术人员应当理解,最大变形量越大、给定范围理论上则越大。
71、进一步的,步骤s6中使每个子区域满足刚体假设的方法包括:
72、若隧道掌子面变形程度小于设定阈值,则直接将各子区域假设为刚体;
73、若隧道掌子面变形程度大于或等于设定阈值,则先通过加密监测将隧道掌子面变形分解成若干小变形,再将各子区域假设为刚体。
74、虽然隧道整个开挖面不是刚体,但是开挖面小的子区域可以认为是“刚体”,本方案基于此假设对不同期开挖面点云进行分块,划分为若干子区域,然后依据每个子区域内的波动特征,对子区域进行精确配准。
75、本方案在进行掌子面精配准时,是对掌子面的子区域自动化配准;墨西哥帽小波处理会描述点云的特征程度,从而提高配准精度。其中,虽然整个掌子面无法假设为一个刚体,但是掌子面的子区域可以认为是一个刚体。本方案与现有技术中仅关注隧道开挖面的挤出位移的方式相比,充分考虑了对掌子面“位移”和“变形”的综合分析,克服了现有技术中的假设方法与隧道开挖面的变形机理不符的缺陷。
76、本方案中需要判断隧道掌子面变形情况,每次判断都以前一次监测为基准,将下一次监测得到的结果与前一次的结果比较,若掌子面外貌和几何形状等差异较小,则可认为为变形较小;若外貌和和几何形状等差异过大则可认为变形较大,监测频率需要根据现在实际确定。
77、其中,变形程度的“设定阈值”,由本领域技术人员根据实际使用时的工况进行适应性设置,在此不作限定,优选为能以肉眼明显分辩出两者在外貌和几何形状上有巨大变化。
78、本发明与现有技术相比,具有如下的优点和有益效果:
79、1、本发明一种基于三维激光点云的隧道掌子面位移场监测方法,引入了拱顶处的初期支护来作为掌子面挤出方向的、稳定的刚体参照,拱顶处的初期支护沿挤出方向几乎是稳定的,因此以初期支护沿挤出方向作为刚体参照,可解决施工环境不存在理想刚体的问题,填补了现有技术的空白,使得在不额外增设参照刚体的前提下可为后续的掌子面精配准提供科学依据。此外,本技术以控制点作为竖直方向的刚体参照,可以直接使用而不会额外增加工作量。
80、2、本发明一种基于三维激光点云的隧道掌子面位移场监测方法,充分考虑了隧道开挖面非刚体变形的特性,提高了空间变形监测精度,更加符合工程现场的应用需求,为隧道开挖面稳定性分析提供了科学且精准的依据,对实际施工具有更强的指导意义。
81、3、本发明一种基于三维激光点云的隧道掌子面位移场监测方法,由于三维激光扫描仪可以克服隧道昏暗和粉尘多的缺陷,因此克服了隧道施工现场的环境干扰,使研究成果更加符合工程应用的需求。
82、4、本发明基于三维激光扫描的隧道掌子面变形监测方法,以对初期支护做精配准来实现对隧道掌子面初配准,并采用逐级迭代算法进行配准,能够有效克服陷入局部最优状态的问题。
83、5、本发明一种基于三维激光点云的隧道掌子面位移场监测方法,提出了从初配准后的隧道点云中分割隧道掌子面与洞身的方法,所提取的隧道掌子面点云具有极高的精确度。
84、6、本发明一种基于三维激光点云的隧道掌子面位移场监测方法,基于小变形刚体假设对掌子面各个子区域做精确的配准,可以追踪掌子面的位移和变形路径,获得位移场,进而有利于根据配准后的结果展开隧道开挖面稳定性分析。
- 还没有人留言评论。精彩留言会获得点赞!