一种人工地形区域重力异常确定方法、系统、设备及介质与流程
本发明涉及地质勘探领域,特别是涉及一种人工地形区域重力异常确定方法、系统、设备及介质。
背景技术:
1、地面重力勘探是通过研究地下物质密度分布不均匀引起的重力变化(称为重力异常),了解和推断地球的结构、地壳的构造,以及勘探矿产资源等等的一种地球物理方法技术。利用高精度重力仪在地面测量重力观测值是地面重力勘探的第一步,由高精度重力仪测量的重力观测值包含了大量的外界影响,不完全是由地下地质体引起的,重力观测值包含了地形起伏、测点的高程变化、地球并非球体以及地球自转引起的重力变化。只有去掉这些影响,才能得到由地下物质密度分布不均匀引起的重力异常。重力观测值中地形起伏的影响最为显著,也是重力异常误差中最主要的组成部分,取得优质的重力异常需解决的首要问题即是处理好地形起伏的影响。
2、地面重力勘探过程中,往往利用收集的原始地形数据求取重力异常。然而在实际测量过程中,经常遇到矿坑、采石场等人工地形区域,实际地形起伏与原始地形数据存在较大误差,导致在人工地形区域测量的重力异常出现畸变点,只能做丢点处理。这样使得重力异常缺失了矿坑部分的异常值,数据不完整,必然影响对探测目标做出合理的推断解释。研究已知矿床深部资源潜力是目前重要的找矿方向,地面重力勘探是探寻深部地质构造的重要手段,重力异常能较好反映深部断裂构造和侵入岩的分布特征,断裂构造和侵入岩恰是基础地质研究和成矿的重要地质条件。
3、因此现有技术中存在重力异常数据不完整的问题,无法准确对地质现象进行研究。
技术实现思路
1、本发明的目的是提供一种人工地形区域重力异常确定方法、系统、设备及介质,以解决人工地形区域重力异常数据缺失的问题,实现对地质现象的准确研究。
2、为实现上述目的,本发明提供了如下方案:
3、一种人工地形区域重力异常确定方法,所述人工地形区域重力异常确定方法应用于人工地形区域重力异常观测装置,所述人工地形区域重力异常观测装置包括:无人机、重力仪、gps测量仪和地面控制点标牌,所述地面控制点标牌放置于人工地形区域内;所述人工地形区域重力异常确定方法包括:
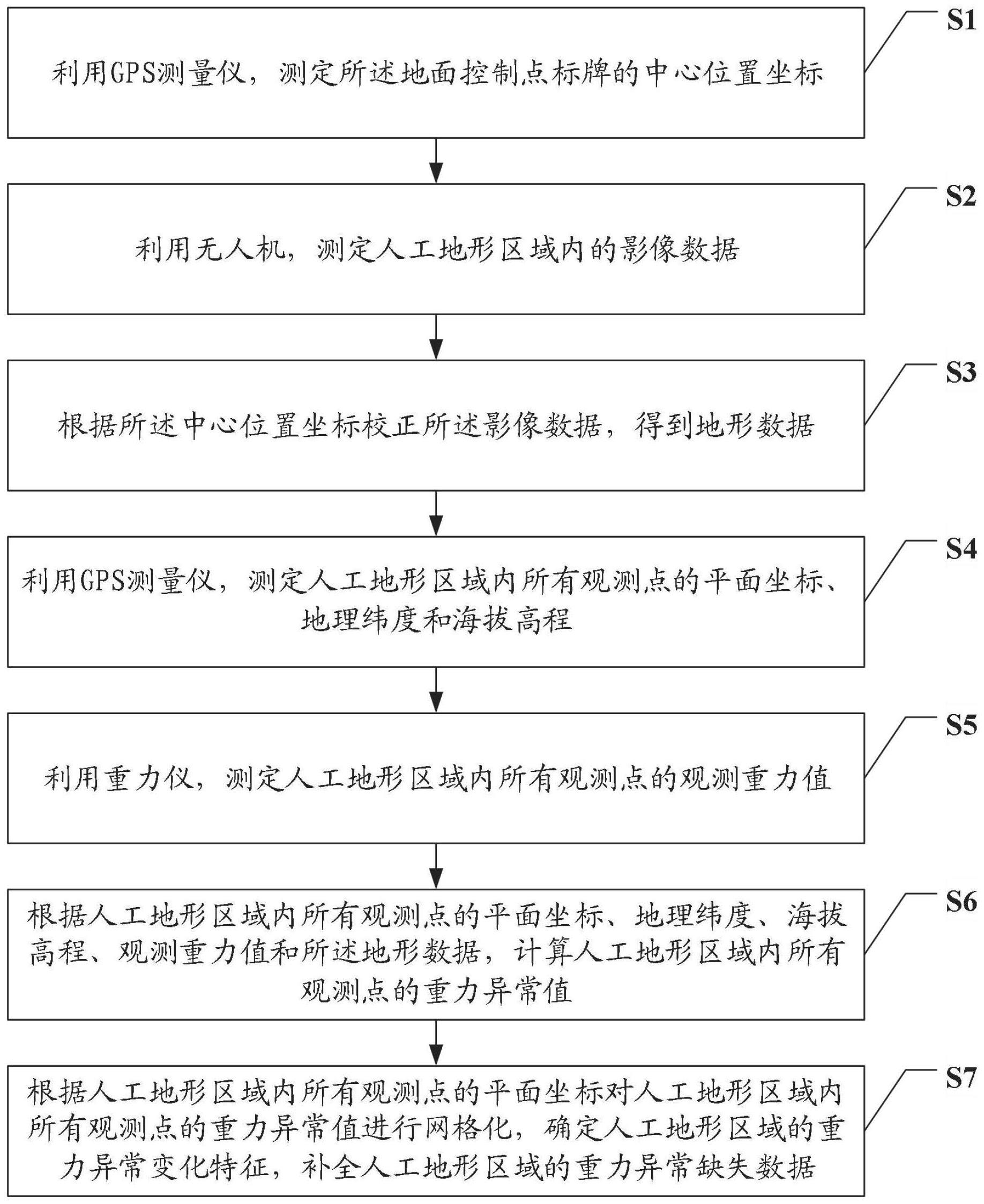
4、利用所述gps测量仪,测定所述地面控制点标牌的中心位置坐标;
5、利用所述无人机,测定人工地形区域内的影像数据;
6、根据所述中心位置坐标校正所述影像数据,得到地形数据;
7、利用所述gps测量仪,测定人工地形区域内所有观测点的平面坐标、地理纬度和海拔高程;
8、利用所述重力仪,测定人工地形区域内所有观测点的观测重力值;
9、根据人工地形区域内所有观测点的平面坐标、地理纬度、海拔高程、观测重力值和所述地形数据,计算人工地形区域内所有观测点的重力异常值;
10、根据人工地形区域内所有观测点的平面坐标对人工地形区域内所有观测点的重力异常值进行网格化,确定人工地形区域的重力异常变化特征,补全人工地形区域的重力异常缺失数据。
11、可选地,根据人工地形区域内所有观测点的平面坐标、地理纬度、海拔高程、观测重力值和所述地形数据,计算人工地形区域内所有观测点的重力异常值,具体包括:
12、根据人工地形区域内所有观测点的地理纬度和海拔高程,计算人工地形区域内所有观测点的布格改正值;
13、根据人工地形区域内所有观测点的平面坐标、海拔高程和所述地形数据,计算人工地形区域内所有观测点的地形改正值;
14、根据人工地形区域内所有观测点的地理纬度,计算人工地形区域内所有观测点的正常重力值;
15、根据人工地形区域内所有观测点的观测重力值、正常重力值、布格改正值和地形改正值,计算人工地形区域内所有观测点的重力异常值。
16、可选地,根据人工地形区域内所有观测点的地理纬度和海拔高程,计算人工地形区域内所有观测点的布格改正值,具体公式为:
17、
18、其中:δgb为布格改正值,单位为10-5m/s2;为观测点的地理纬度;h为观测点的海拔高程;ρ1为中间层密度;a为圆域中间层改正半径。
19、可选地,根据人工地形区域内所有观测点的平面坐标、海拔高程和所述地形数据,计算人工地形区域内所有观测点的地形改正值,具体公式为:
20、
21、其中,ggt为地形改正值;g为引力常数;ρ为地壳平均密度;l为积分格距;cij为积分常数,具体为梯形系数;rij为积分节点(i,j)与观测点之间的距离;hij为积分节点(i,j)与观测点之间的高程差;i为积分节点的行序号;j为积分节点的列序号;所述积分节点是基于所述地形数据确定的;所述积分节点与观测点之间的距离是基于观测点的平面坐标确定的;所述积分节点与观测点之间的高程差是基于观测点的海拔高程确定的。
22、可选地,根据人工地形区域内所有观测点的地理纬度,计算人工地形区域内所有观测点的正常重力值,具体公式为:
23、
24、其中,g0为正常重力值,单位为10-5m/s2;为观测点的地理纬度。
25、可选地,根据人工地形区域内所有观测点的观测重力值、正常重力值、布格改正值和地形改正值,计算人工地形区域内所有观测点的重力异常值,具体公式为:
26、δgb=g-g0+δgb+ggt
27、其中:δgb为重力异常值;g为观测重力值;g0为正常重力值;δgb为布格改正值;ggt为地形改正值。
28、可选地,根据所述中心位置坐标校正所述影像数据,得到地形数据,具体包括:
29、根据所述中心位置坐标,对所述影像数据进行空中三角测量解算,得到三维高程数据体;
30、对所述三维高程数据体进行数据合成和格式转换,得到地形数据。
31、一种人工地形区域重力异常确定系统,所述人工地形区域重力异常确定系统应用于人工地形区域重力异常观测装置,所述人工地形区域重力异常观测装置包括:无人机、重力仪、gps测量仪和地面控制点标牌,所述地面控制点标牌放置于人工地形区域内;所述人工地形区域重力异常确定系统包括:
32、中心位置坐标获取模块,用于利用所述gps测量仪,测定所述地面控制点标牌的中心位置坐标;
33、影像数据获取模块,用于利用所述无人机,测定人工地形区域内的影像数据;
34、地形数据获取模块,用于根据所述中心位置坐标校正所述影像数据,得到地形数据;
35、观测点信息获取模块,用于利用所述gps测量仪,测定人工地形区域内所有观测点的平面坐标、地理纬度和海拔高程;
36、观测重力值获取模块,用于利用所述重力仪,测定人工地形区域内所有观测点的观测重力值;
37、重力异常值确定模块,用于根据人工地形区域内所有观测点的平面坐标、地理纬度、海拔高程、观测重力值和所述地形数据,计算人工地形区域内所有观测点的重力异常值;
38、网格化模块,用于根据人工地形区域内所有观测点的平面坐标对人工地形区域内所有观测点的重力异常值进行网格化,确定人工地形区域的重力异常变化特征,补全人工地形区域的重力异常缺失数据。
39、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的人工地形区域重力异常确定方法。
40、一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现上述的人工地形区域重力异常确定方法。
41、根据本发明提供的具体实施例,本发明公开了以下技术效果:
42、本发明提供的人工地形区域重力异常确定方法,利用gps测量仪测定地面控制点标牌的中心位置坐标和人工地形区域内所有观测点的平面坐标、地理纬度和海拔高程,利用无人机测定人工地形区域内的影像数据,并根据中心位置坐标校正影像数据,得到地形数据,利用重力仪测定人工地形区域内所有观测点的观测重力值,从而根据上述数据计算人工地形区域内所有观测点的重力异常值并对重力异常值进行网格化,从而确定人工地形区域的重力异常变化特征,补全人工地形区域的重力异常缺失数据。因此,本发明能够解决人工地形区域重力异常数据缺失的问题,进而有利于地质构造研究和找矿勘查。
- 还没有人留言评论。精彩留言会获得点赞!