基于点云数据的配电铁塔精细化巡检航线设计方法及装置与流程
本发明涉及无人机精细化巡检,具体涉及一种基于点云数据的配电铁塔精细化巡检航线设计方法及装置。
背景技术:
1、配电作为电网的重要组成部分,保障其安全、可靠、稳定的运行,关系着电力系统“最后一公里”的工作。因此需不断对配电线路进行巡视与维护,及时发现故障、消减安全隐患。高电压等级的配电线路由铁塔架设,通过横担连接绝缘子串支撑导线与地线,配电铁塔的外形与输电线路的杆塔结构相似,但配电铁塔具有特殊性:高度较低、绝缘子个数少、绝缘子串长度短、横担位置随机、巡检部件少等。传统的配电铁塔巡检主要依靠巡检人员在地面观察部件运行情况或攀爬到部件位置进行检查,存在一定的安全风险、时间周期长、人员投入大、存在巡检盲点。随着无人机技术的发展,飞行控制、传感器灵敏度、相机性能有了很大提升,已应用于架空输、配电线路的通道巡检、精细化巡检、日常巡检等巡检工作中,无人机具有机动灵活等优势,可以飞行到巡检人员难以到达或巡检盲点区域,在一定程度上减少人力、物力、时间等的投入。
2、目前配电铁塔主要采用“人工+无人机”的方式开展巡检,巡检人员在铁塔附近操作无人机,在显示屏上观察拍摄目标,待寻找到拍摄目标后,执行拍照动作,获取得到巡检照片。配电线路一般分布范围较广、主线支线交叉贯穿、铁塔周围环境复杂,依靠人工操纵无人机存在安全隐患、拍摄不统一、成像不合理等问题,且对操作人员的专业技术、飞行经验等要求较高。
3、无人机智能巡检是一种新型的巡检方式,基于高密度配电线路激光点云数据进行铁塔的巡检航线设计,将巡检航线设计成果导入无人机飞行控制系统,实现无人机的自主飞行与巡检照片的自动获取,提升了无人机飞行的安全性,缩短了巡检人员操作无人机寻找拍摄目标的时间,降低了巡检人员的技术门槛。
4、巡检航线是无人机智能巡检的关键因素。对于巡检航线,市面上的无人机厂家自带软件大多基于二维地图设计,无法满足配电铁塔的三维精细化巡检航线设计。一些三维航线设计软件需要人工手动在每一基铁塔的三维点云数据上识别拍摄目标位置,存在识别困难、耗时长等问题;在航线设计时,需要大量的人工编辑调整,巡检照片的质量无法得到保证;无法对各个航拍点按照拍摄目标进行规范化自动命名,导致巡检照片定位困难。
技术实现思路
1、为此,本发明提供一种基于点云数据的配电铁塔精细化巡检航线设计方法及装置,以解决现有巡检航线设计存在的自动化水平较低、巡检航线设计效率低等问题。
2、为了实现上述目的,本发明提供如下技术方案:
3、根据本发明实施例的第一方面,提出一种基于点云数据的配电铁塔精细化巡检航线设计方法,所述方法包括:
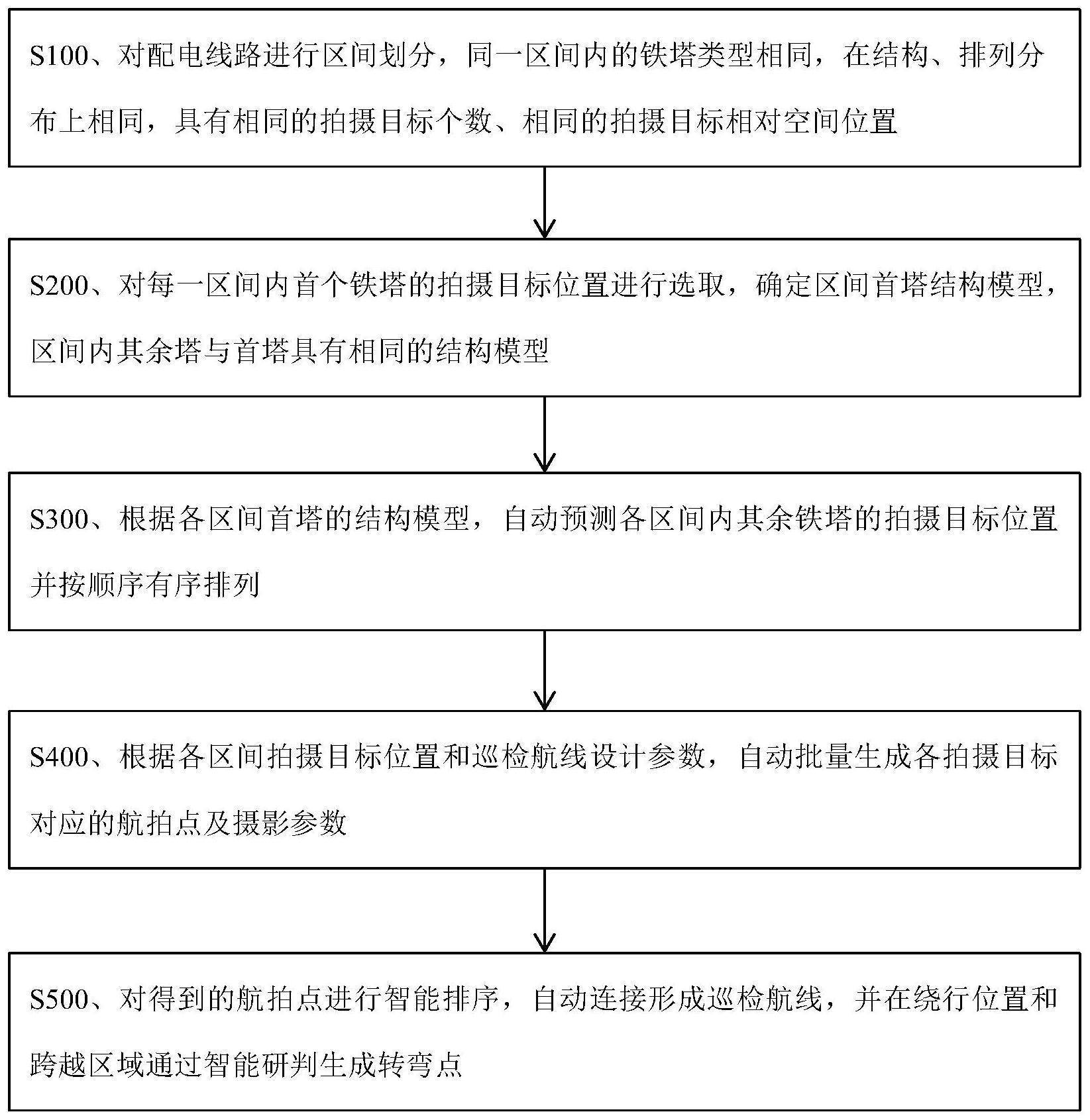
4、对配电线路进行区间划分,同一区间内的铁塔类型相同,在结构、排列分布上相同,具有相同的拍摄目标个数、相同的拍摄目标相对空间位置;
5、对每一区间内首个铁塔的拍摄目标位置进行选取,确定区间首塔结构模型,区间内其余塔与首塔具有相同的结构模型;
6、根据各区间首塔的结构模型,自动预测各区间内其余铁塔的拍摄目标位置并按顺序有序排列;
7、根据各区间拍摄目标位置和巡检航线设计参数,自动批量生成各拍摄目标对应的航拍点及摄影参数;
8、对得到的航拍点进行智能排序,自动连接形成巡检航线,并在绕行位置和跨越区域通过智能研判生成转弯点。
9、进一步地,所述方法还包括:
10、获取配电铁塔平面位置中心坐标,确定配电线路走向并计算每一基铁塔的最高点坐标,具体为:
11、读取配电线路台账中的经纬度数据得到铁塔平面位置中心坐标(xi,yi),其中i为铁塔序号,根据铁塔的顺序确定线路的走向;
12、以铁塔平面位置中心坐标为底面中心,计算z轴方向点云数据坐标的最大z值zmax_i,得到每一基铁塔的最高点坐标(xi,yi,zmax_i)。
13、进一步地,对配电线路进行区间划分,具体包括:
14、结合铁塔特性信息对配电线路进行区间划分,所述铁塔特性信息包括配电铁塔上架设的线路回路数、铁塔导线排列方式、铁塔地线悬挂位置。
15、进一步地,对每一区间内首个铁塔的拍摄目标位置进行选取,确定区间首塔结构模型,具体包括:
16、根据划分的线路区间,以区间首塔作为基准塔,通过在首塔的三维点云上选取拍摄目标,拍摄目标的选取位置包括地线悬挂点、绝缘子串中点。
17、进一步地,根据各区间首塔的结构模型,自动预测各区间内其余铁塔的拍摄目标位置并按顺序有序排列,具体包括:
18、判断首塔的各拍摄目标在配电线路走向的哪一侧;
19、判断首塔的各拍摄目标在塔上哪一层;
20、将各拍摄目标按顺序排列。
21、进一步地,判断首塔的各拍摄目标在配电线路走向的哪一侧,具体包括:
22、计算前塔方向与后塔方向,前塔方向通过前塔中心点与当前塔中心点计算,后塔方向通过后塔中心点与当前塔中心点计算;
23、计算当前点与中心点的方向;
24、根据当前点的方向与前后塔方向的关系判断在哪一侧:
25、计算左边方向角,如果当前角与左边角相差20度以内,或者当前角与左边角相差减去360度小于20度,则当前点属于左边;如果当前角与右边角相差20度以内,或者当前角与右边角相差减去360度小于20度,则当前点属于右边;如果上两种都不能判断的,则用判断左右角度差的方式判断左右;
26、计算左边角度差,如果当前角与左边角的相差值小于当前角减去左边角减去360度的值,则左边角度差为前者,否则为后者:
27、计算右边角度差,如果当前角与右边角的相差值小于当前角减去右边角减去360度的值,则右边角度差为前者,否则为后者;
28、然后根据两边角度差判断当前点的位置,当左边角度差小于右边角度差,则属于左边,否则当前点属于右边。
29、进一步地,判断首塔的各拍摄目标在塔上哪一层,具体包括:
30、首先统计塔上所有拍摄点的最高点与最低点;
31、从第一个点开始,寻找离此点距离小于塔厚即塔的层厚的点,这样将这一层的点全部提取出来;
32、继续寻找其他层的点,直至将所有塔上的点都全部寻找完;
33、用最高点和最低点与总层数计算出层高;
34、用每一点与最高点的差值与层高计算每个点的层序数;
35、最后将所有点按拍摄顺序有序的排列起来。
36、根据本发明实施例的第二方面,提出一种基于点云数据的配电铁塔精细化巡检航线设计装置,所述装置包括:
37、区间划分模块,用于对配电线路进行区间划分,同一区间内的铁塔类型相同,在结构、排列分布上相同,具有相同的拍摄目标个数、相同的拍摄目标相对空间位置;
38、拍摄目标选取模块,用于对每一区间内首个铁塔的拍摄目标位置进行选取,确定区间首塔结构模型,区间内其余塔与首塔具有相同的结构模型;
39、根据各区间首塔的结构模型,自动预测各区间内其余铁塔的拍摄目标位置并按顺序有序排列;
40、根据各区间拍摄目标位置和巡检航线设计参数,自动批量生成各拍摄目标对应的航拍点及摄影参数;
41、对得到的航拍点进行智能排序,自动连接形成巡检航线,并在绕行位置和跨越区域通过智能研判生成转弯点。
42、根据本发明实施例的第三方面,提出一种基于点云数据的配电铁塔精细化巡检航线设计系统,所述系统包括:处理器和存储器;
43、所述存储器用于存储一个或多个程序指令;
44、所述处理器,用于运行一个或多个程序指令,用以执行如上任一项所述的方法。
45、根据本发明实施例的第四方面,提出一种计算机存储介质,所述计算机存储介质中包含一个或多个程序指令,所述一个或多个程序指令用于被一种基于点云数据的配电铁塔精细化巡检航线设计系统执行如上任一项所述的方法。
46、本发明具有如下优点:
47、本发明提出的一种基于点云数据的配电铁塔精细化巡检航线设计方法及装置,所述方法包括:对配电线路进行区间划分,同一区间内的铁塔类型相同,在结构、排列分布上相同,具有相同的拍摄目标个数、相同的拍摄目标相对空间位置;对每一区间内首个铁塔的拍摄目标位置进行选取,确定区间首塔结构模型,区间内其余塔与首塔具有相同的结构模型;根据各区间首塔的结构模型,自动预测各区间内其余铁塔的拍摄目标位置并按顺序有序排列;根据各区间拍摄目标位置和巡检航线设计参数,自动批量生成各拍摄目标对应的航拍点及摄影参数;对得到的航拍点进行智能排序,自动连接形成巡检航线,并在绕行位置和跨越区域通过智能研判生成转弯点。实现了适用于配电铁塔的精细化巡检航线设计,通过自动、智能算法,可以对配电铁塔批量进行智能航线设计,减少了人工的调整编辑,提高了配电铁塔精细化巡检航线设计的效率。
- 还没有人留言评论。精彩留言会获得点赞!