一种测量螺旋桨涵道气动力性能的装置及方法与流程
本发明涉及螺旋桨涵道测试领域,更具体地涉及一种测量螺旋桨涵道气动力性能的装置及方法。
背景技术:
1、螺旋桨是一种靠桨叶在空气中旋转将发动机转动功率转化为升力或推进力的装置。涵道风扇式螺旋桨,是一种在自由螺旋桨的外围设置涵道的推进装置。国内外很早就有人开始研究涵道风扇螺旋桨,并取得了很多研究成果,广泛应用于各种交通工具尤其是航空器中例如涵道风扇飞行器,直升机涵道尾桨,航模电动涵道风扇和水上飞机动力等。
2、螺旋桨运动时主要存在的阻力有空气摩擦阻力、压差阻力、诱导阻力和干扰阻力等。桨叶因高速圆周运动使叶尖处速度最高,诱导阻力比较大,对外界气流产生冲击造成噪声大,这是自由螺旋桨动力效率低的主要原因。自由螺旋桨由于是悬臂梁结构杆件,在气动作用下叶尖处容易变形导致效率进一步恶化,这是限制螺旋桨高速运动的瓶颈之一,也是螺旋桨飞机及直升机速度限制之关键。
3、由于叶尖处受涵道限制,冲击噪声减小。诱导阻力减少,而效率较高。在同样功率消耗下, 涵道风扇较同样直径的孤立螺旋桨, 会产生更大的推力。同时由于涵道的环括作用, 其结构紧凑、气动噪声低、使用安全性好,因此作为一种推力或升力装置, 被应用于飞行器设计当中。
4、为了得到涵道风扇式螺旋桨气动力性能需要对其进行测试试验,目前第一种测试方法是把涵道螺旋桨整体安装在测试台上,测量螺旋桨加涵道总体气动力。其缺点这种测试装置无法单独得到涵道的气动力性能参数。在申请号为cn201621175338.1的中国专利中公开了一种螺旋桨测试装置。即为第一种测量方法,采用拉力传感器实现测量涵道螺旋桨整体推力,其它分量气动载荷未实现测量。第二种测试方法螺旋桨和涵道分开测量,螺旋桨用成品拉力传感器和扭矩传感器测量其性能。在申请号为cn201710206883.5的中国专利中公开了一种测涵道共轴双旋翼无人机气动特性试验台。该测量台是采用第二种方法,采用拉力传感器及扭矩传感器分别测量螺旋桨和涵道的拉力和扭矩。涵道用另外一套成品拉力传感器和扭矩传感器测量其性能。其缺点一:成品拉力、扭矩传感器量程及空间尺寸不一定适用于涵道测量装置。其缺点二:拉力、扭矩传感器通过轴承、连杆等机构和涵道连接,对其测量精度存在干扰。缺点三:只能测量拉力和扭矩,其它方向上的气动载荷无法测量。
技术实现思路
1、为解决现有技术中的上述技术问题,本发明提供一种测量螺旋桨涵道气动力性能的装置及方法。
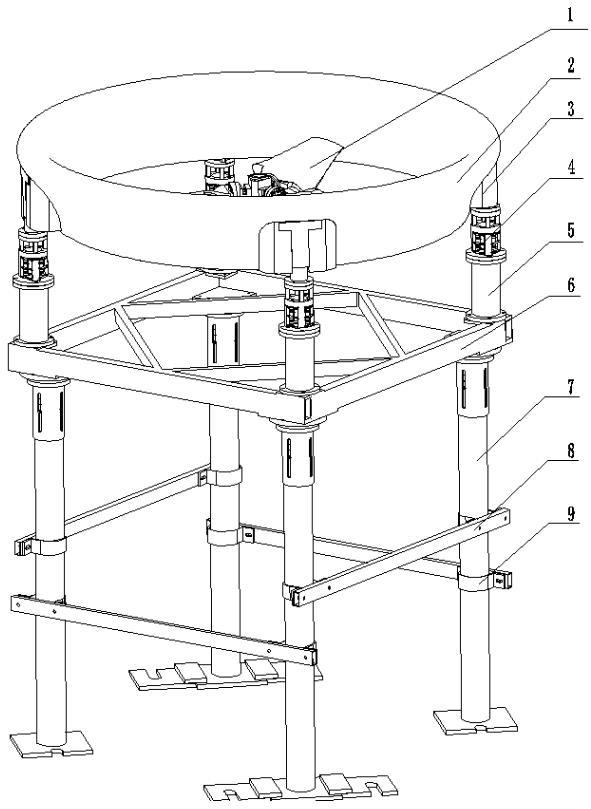
2、本发明采用的具体方案为:一种测量螺旋桨涵道气动力性能的装置,所述装置包括涵道、三分量天平、上框架、支撑腿,所述涵道内设置桨叶,所述涵道的外侧壁与三分量天平连接,所述三分量天平的底部与法兰筒的一端连接,所述法兰筒的另一端与上框架连接,所述上框架的下方与支撑腿连接。
3、所述的三分量天平包括上法兰,所述上法兰的下方设置四个柱梁,阻力应变片与侧力应变片分别设置在相邻的柱梁上,所述三分量天平的天平主体之间设置升力梁,所述升力梁上设置升力应变片,所述三分量天平的天平主体的下方设置下法兰。
4、所述涵道外侧壁通过连接座与三分量天平的上法兰连接。
5、所述三分量天平的下法兰与法兰筒连接。
6、所述支撑腿的底部设置底板,所述支撑腿的顶部设置调节法兰盘,所述调节法兰盘上设置腰型孔,所述支撑腿的外壁套有加强筒,所述加强筒的顶部设置通孔,所述腰型孔与通孔配合完成调节法兰盘与加强筒的连接。
7、所述调节法兰盘的上部为法兰盘,该法兰盘的中部设置延长杆,所述延长杆伸入到所述支撑腿的内部,所述延长杆的表面设置螺纹,所述支撑腿内部上方设置螺纹孔,所述延长杆伸入到所述螺纹孔内。
8、所述涵道的外侧壁设置4个三分量天平。
9、所述支撑腿的个数为4个,相邻的支撑腿之间采用加强肋固定,所述加强肋两端设置半圆环,所述半圆环内套入支撑腿。
10、另一方面,一种测量螺旋桨涵道气动力的方法,所述方法包括如下步骤:
11、步骤一、将4台所述三分量天平设置在涵道的外侧壁,试验时给四台三分量天平供电,四台三分量天平信号输出端和信号采集设备连接;四台三分量天平按逆时针顺序编号分别为第一三分量天平、第二三分量天平、第三三分量天平、第四三分量天平;
12、步骤二、测量第一三分量天平的纵向力、横向力、和侧向力;用采集设备采集三分量天平的纵向力、横向力和侧向力三分量的电压值输出并乘以三分量天平纵向力元系数横向力元系数和侧向力元系数,可以得到三分量天平纵向力、横向力、和侧向力;
13、步骤三、测量第二三分量天平的纵向力、横向力和侧向力,方法同步骤二;
14、步骤四、测量第三三分量天平的纵向力、横向力和侧向力,方法同步骤二;
15、步骤五、测量第四三分量天平的纵向力、横向力和侧向力,方法同步骤二;
16、步骤六、通过步骤二至步骤四得到的四台三分量天平纵向力、横向力和侧向力气动载荷运用测量组合方法可以得到涵道六分量气动力载荷。
17、所述的测量组合方法为:
18、y1=ky1×δu11;x1=kx1×δu12;z1=kz1×δu13 ;
19、y2=ky2×δu21;x2=kx2×δu22;z2=kz2×δu23 ;
20、y3=ky3×δu31;x3=kx3×δu32;z3=kz3×δu33 ;
21、y4=ky4×δu41;x4=kx4×δu42;z4=kz4×δu43 ;
22、y=y1+y2+y3+y4;
23、x=x1+x2+x3+x4;
24、z=z1+z2+z3+z4;
25、mz=y1×r-y3×r;
26、mx=y2×r-y4×r;
27、my=x2×r+z3×r- x4×r- z1×r;
28、其中:y为涵道纵向力、x为涵道横向力、z为涵道侧向力、mz为涵道的俯仰力矩、mx为涵道的滚转力矩、my为涵道的偏航力矩,
29、mz为涵道俯仰力矩、mx为涵道滚转力矩、my为涵道偏航力矩、r为涵道半径,
30、y1、x1、z1分别为第一三分量天平的纵向力、横向力、侧向力,
31、δu11、δu12、δu13分别为第一三分量天平的纵向力元电压值输出、横向力元电压值输出、侧向力元电压值输出,
32、ky1为纵向力和纵向力元输出电压之间的比例系数,kx1为横向力和横向力元输出电压之间的比例系数,kz1为侧向力和侧向力元输出电压之间的比例系数,
33、y2、x2、z2分别为第二三分量天平的纵向力、横向力、侧向力,
34、δu21、δu22、δu23分别为第二三分量天平的纵向力元电压值输出、横向力元电压值输出、侧向力元电压值输出,
35、ky2为纵向力和纵向力元输出电压之间的比例系数,kx2为横向力和横向力元输出电压之间的比例系数,kz2为侧向力和侧向力元输出电压之间的比例系数,
36、y3、x3、z3分别为第三三分量天平的纵向力、横向力、侧向力,
37、δu31、δu32、δu33分别为第三三分量天平的纵向力元电压值输出、横向力元电压值输出、侧向力元电压值输出,
38、ky3为纵向力和纵向力元输出电压之间的比例系数,kx3为横向力和横向力元输出电压之间的比例系数,kz3为侧向力和侧向力元输出电压之间的比例系数,
39、y4、x4、z4分别为第四三分量天平的纵向力、横向力、侧向力,
40、δu41、δu42、δu43分别为第四三分量天平的纵向力元电压值输出、横向力元电压值输出、侧向力元电压值输出,
41、ky4为纵向力和纵向力元输出电压之间的比例系数,kx4为横向力和横向力元输出电压之间的比例系数,kz4为侧向力和侧向力元输出电压之间的比例系数。
42、本发明相对于现有技术具有如下有益效果:
43、本发明公开了一种测量螺旋桨涵道气动力性能的装置,所述装置包括涵道、三分量天平、上框架、支撑腿,所述涵道内设置桨叶,所述涵道的外侧壁与三分量天平连接,所述三分量天平的底部与法兰筒的一端连接,所述法兰筒的另一端与上框架连接,所述上框架的下方与支撑腿连接。本发明在涵道外设置三分量天平,可以测量纵向、横向、侧向三方向的力。涵道承受的六分量气动力载荷通过4个连接座传递到三分量天平上,通过三分量天平的三个方向的力组合运算可以得到涵道全部气动力,解决了拉力、扭矩传感器通过轴承、连杆等机构和涵道连接,对其测量精度存在干扰以及只能测量拉力和扭矩,其它方向上的气动载荷无法测量的问题。
- 还没有人留言评论。精彩留言会获得点赞!