一种TDOA与RSS组合的水下单源点被动自定位导航方法
本技术涉及水下航行器定位的,尤其是涉及一种tdoa与rss组合的水下单源点被动自定位导航方法。
背景技术:
1、基于声波的水下航行器自定位技术可以分为主动和被动两种方式,其中被动定位的隐蔽性好、安全性高且作用距离远,其通常利用传统的水声定位方案,比如长基线(longbaseline,lbl)和超短基线(ultra-short baseline,usbl)。lbl定位系统在实际应用中需要安装至少4个信标,基线长度为0.1km-6km不等,信标阵列的设计、布放、标定以及回收都是非常复杂的,需要花费大量成本,如果所要覆盖的范围更大的话,则需要更多的声学信标。usbl声学单元集中安装在收发器中形成声学阵列,基线长度小于1m,定位精度受斜距影响。
2、为了大范围和大规模的应用,降低定位系统的复杂度,降低设备部署回收成本。相比于传统的水声定位系统,基于单信标测距的定位只需要一个声学信标,有效降低了auv定位的系统安装和配置成本,提升了auv定位系统的便携性。
3、目前水下无人航行器(autonomous underwater vehicle,auv)通常是通过外部信号得到自身与信号源的距离的测量值,把这个测量值与水下航行器装载的捷联惯性导航系统结合,从而进行定位导航的。水下航行器携带的捷联惯性导航系统是把惯性仪表直接固定在航行器上,这个系统可以仅依靠自身的计算来完成自身位置的定位导航。
4、单独使用捷联惯性导航系统进行定位导航,定位导航误差会随时间的推移而增大。故而现在的水下定位技术,通常还通过接收外部信号来测得信号源与水下航行器的相对距离,来修正捷联惯性导航系统的定位误差。从结果上看,外部测量值与捷联惯性导航系统的定位值相融合,最终得到更精确的水下航行器的定位和导航轨迹。
5、对于水下单源被动目标自定位方案,通常使用捷联式惯导系统(strapdowninertial navigation system,sins)与基于距离的定位方法进行定位。基于距离的定位的测距方法有:到达时间定位法(time of arrival,toa),到达时间差定位法(timedifference of arrival,tdoa),到达角度(angle of arrival,aoa)和接收信号强度指示器(received signal strength indicator,rssi)。
6、对于toa方案获取距离,有两种方式:一种是利用双程的传播时间来计算双发两段的距离,其目的主要是解决时钟同步问题,但是需要接收端转发信号,这会导致暴露接收端的位置,破坏隐蔽性;另一种是只通过单程的传播时间来计算双发两段的距离,但引入时钟同步的问题。
7、对于tdoa的水下定位方案,通常需要定位目标主动发射信号或是需要多个信标,这将暴露自身位置或提升能耗。现有技术中存在一些采用了单信标的定位方案,其利用历史auv位置,结合tdoa方法对auv位置进行更新,但是由于历史auv位置的误差较大,导致最后定位效果不理想;现有技术中也有利用信标进行特定轨迹的移动,进行tdoa定位,这就要求auv与信标进行双向通信,这就容易导致暴露auv的位置。
8、除了tdoa和toa方式,也有人基于rss方式获取斜距,基于rss的斜距测量,具有无须时钟同步的优点,但是其采用经验公式得到距离,使得它易受噪声、发送功率、水下多径效应、水下信道非均匀介质性影响。
技术实现思路
1、针对上述背景技术中存在的问题,本技术提出了一种tdoa与rss组合的水下单源点被动自定位导航方法。
2、本技术提出的一种tdoa与rss组合的水下单源点被动自定位导航方法,包括以下步骤:
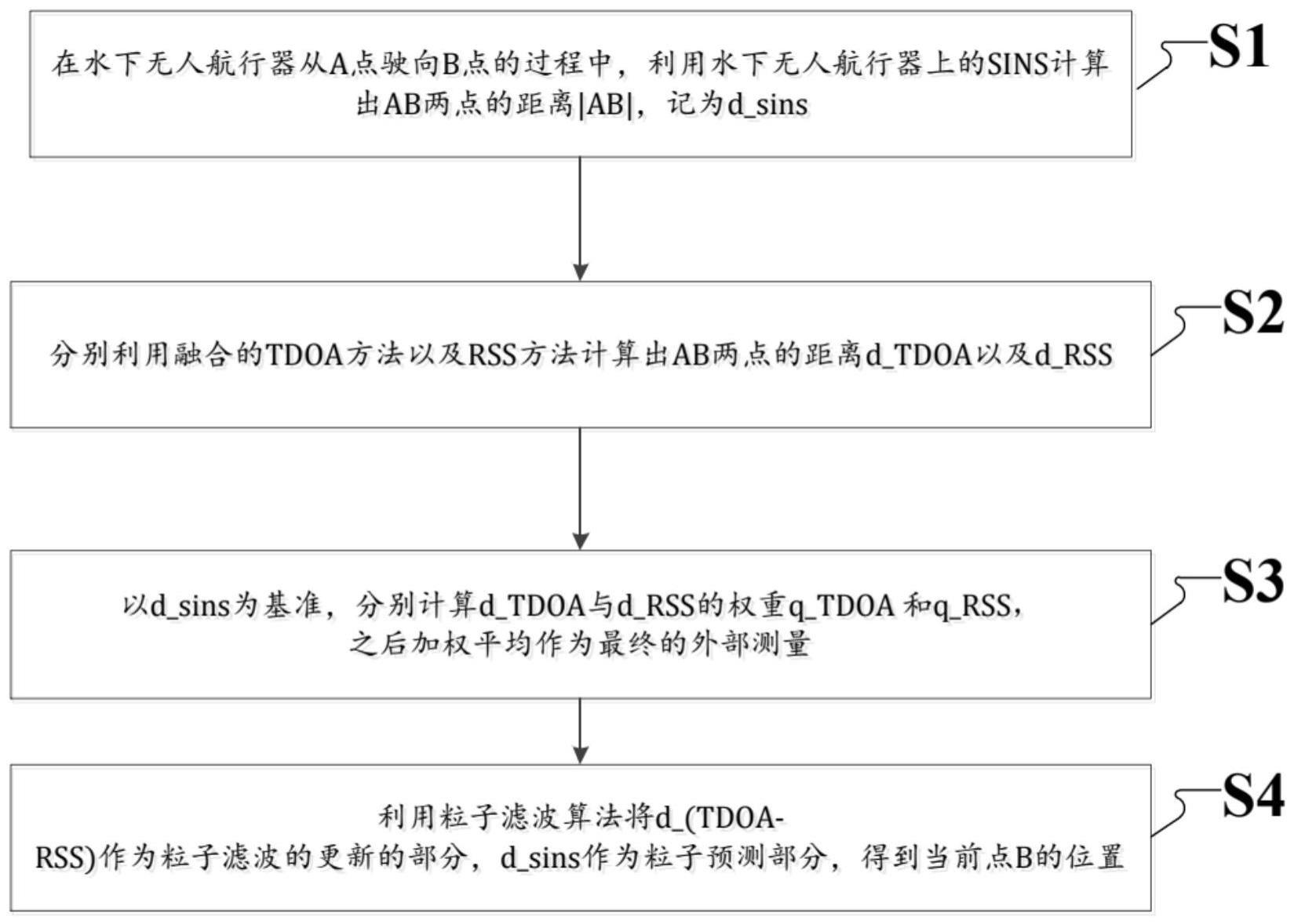
3、s101:在水下无人航行器从a点驶向b点的过程中,利用水下无人航行器上的sins计算出ab两点的距离|ab|,记为dsins;
4、s102:分别利用融合的tdoa方法以及rss方法计算出ab两点的距离dtdoa以及drss;
5、s103:以dsins为基准,分别计算dtdoa与drss的权重qtdoa和qrss:
6、
7、
8、之后加权平均作为最终的外部测量:
9、dtdoa-rss=qtdoa*dtdoa+qrss*drss;
10、s104:利用粒子滤波算法将dtdoa-rss作为粒子滤波的更新的部分,dsins作为粒子预测部分,得到当前点b的位置。
11、通过采用上述技术方案,本发明根据tdoa和rss不需要时钟同步的特点,将tdoa与rss进行结合。通过tdoa的rss结合,一方面tdoa技术可以利用基于rss的定位框架所提供更精确的历史定位点来更新当前位置,另一方面rss可以结合tdoa进行距离测量值的获取,避免仅依靠rss来获取距离测测量,通过rss与tdoa测距融合以降低rss受突发噪声的影响。
12、优选的,在所述s102中,利用融合的tdoa方法计算出ab两点的距离dtdoa具体包括:
13、根据上一个时刻计算的定位结果a,计算出已知的信标o点与a点之间的距离|oa|,再结合b点测得的rss信号强度计算当前ob两点距离记为|obrss|,之后将|obrss|与dsins带入粒子滤波算法中计算b点位置,最后计算出ob两点距离,记为|obrough|;
14、利用|oa|、|obrough|以及dsins计算o、a和b三点形成的三角形的点o的余弦值coso:
15、令ta、tb分别为水下无人航行器在a与b点接收到信标o发送信号的时刻,并根据tdoa方法得到ob两点距离|obtdoa|;
16、接着利用|obtdoa|以及coso计算得到ab两点的距离|ad|,记为dtdoa。
17、优选的,所述利用|oa|、|obrough|以及dsins计算o、a和b三点形成的三角形的点o的余弦值coso的算法为:
18、
19、优选的,所述根据tdoa方法得到ob两点距离|obtdoa|的算法为:
20、|bd|=|oa|-|ob|=c*(tb-ta-t);
21、|obtdoa|=|oa|-|bd|;
22、其中c为水下声速,其值为1500m/s。
23、优选的,所述利用|obtdoa|以及coso计算得到ab两点的距离|ab|的算法为:
24、
25、优选的,在所述s102中,利用融合的rss方法计算出ab两点的距离drss具体为:
26、
27、优选的,所述|bd|为b点到d点的距离,所述d点位于ob的延长线上,且ad垂直于od。
28、综上所述,本技术至少包括以下有益技术效果:
29、1.本技术提出可用于水下单源点被动自定位场景下的基于tdoa与rss组合的定位技术,相比使用传统rss技术的水下定位,该发明能够综合tdoa与sins的测量值从而降低rss受突发噪声的影响,提升了定位的稳定性和精度;
30、2.本发明通过tdoa方法获取距离差来估计水下航行器的位置,而传统的tdoa方法要么需要水下航行器主动发送信号,或者需要多个信标或多个基站;也有方案采用双曲线交汇的原理通过多个双曲线交汇确定信标然后反推水下航行器位置,但是由于历史位置的精度不高,导致误差不收敛;
31、3.本发明使用了rss和tdoa两种技术分别获取信标与auv之间的距离。但是水下环境复杂多变,所以这两种方式得到的距离测量均不同程度地受水下突发噪声影响。为了选择当下最接近真实值的距离测量值,本发明依据sins短时精度高且不受水下突发噪声影响的特性,以sins的测量值为基准,当rss或tdoa方法测得距离测量值与sins测得的距离测量值越接近时,其权重越高,最后进行加权平均得到最终的距离测量值。
- 还没有人留言评论。精彩留言会获得点赞!